
Рефераты по авиации и космонавтике
Рефераты по административному праву
Рефераты по безопасности жизнедеятельности
Рефераты по арбитражному процессу
Рефераты по архитектуре
Рефераты по астрономии
Рефераты по банковскому делу
Рефераты по сексологии
Рефераты по информатике программированию
Рефераты по биологии
Рефераты по экономике
Рефераты по москвоведению
Рефераты по экологии
Краткое содержание произведений
Рефераты по физкультуре и спорту
Топики по английскому языку
Рефераты по математике
Рефераты по музыке
Остальные рефераты
Рефераты по биржевому делу
Рефераты по ботанике и сельскому хозяйству
Рефераты по бухгалтерскому учету и аудиту
Рефераты по валютным отношениям
Рефераты по ветеринарии
Рефераты для военной кафедры
Рефераты по географии
Рефераты по геодезии
Рефераты по геологии
Рефераты по геополитике
Рефераты по государству и праву
Рефераты по гражданскому праву и процессу
Рефераты по кредитованию
Рефераты по естествознанию
Рефераты по истории техники
Рефераты по журналистике
Рефераты по зоологии
Рефераты по инвестициям
Рефераты по информатике
Исторические личности
Рефераты по кибернетике
Рефераты по коммуникации и связи
Рефераты по косметологии
Рефераты по криминалистике
Рефераты по криминологии
Рефераты по науке и технике
Рефераты по кулинарии
Рефераты по культурологии
Рефераты по авиации и космонавтике
Рефераты по административному праву
Рефераты по безопасности жизнедеятельности
Рефераты по арбитражному процессу
Рефераты по архитектуре
Рефераты по астрономии
Рефераты по банковскому делу
Рефераты по сексологии
Рефераты по информатике программированию
Рефераты по биологии
Рефераты по экономике
Рефераты по москвоведению
Рефераты по экологии
Краткое содержание произведений
Рефераты по физкультуре и спорту
Топики по английскому языку
Рефераты по математике
Рефераты по музыке
Остальные рефераты
Рефераты по биржевому делу
Рефераты по ботанике и сельскому хозяйству
Рефераты по бухгалтерскому учету и аудиту
Рефераты по валютным отношениям
Рефераты по ветеринарии
Рефераты для военной кафедры
Рефераты по географии
Рефераты по геодезии
Рефераты по геологии
Рефераты по геополитике
Рефераты по государству и праву
Рефераты по гражданскому праву и процессу
Рефераты по кредитованию
Рефераты по естествознанию
Рефераты по истории техники
Рефераты по журналистике
Рефераты по зоологии
Рефераты по инвестициям
Рефераты по информатике
Исторические личности
Рефераты по кибернетике
Рефераты по коммуникации и связи
Рефераты по косметологии
Рефераты по криминалистике
Рефераты по криминологии
Рефераты по науке и технике
Рефераты по кулинарии
Рефераты по культурологии
Курсовая работа: Разработка привода цепного транспортера
Курсовая работа: Разработка привода цепного транспортера
Содержание
Введение
1 Кинематический расчёт привода
1.1 Выбор электрического двигателя
1.2 Расчёт кинематических, силовых и энергетических параметров на отдельных валах .
1.3 Расчёт привода в Автоматизированный системах «Восход», «Кинематик».
1.4 Сравнительный анализ результатов и выбор рационального варианта
2 Расчет и проектирование зубчатого редуктора
2.1 Выбор материалов зубчатых колес. Определение допускаемых напряжений
2.2 Проектировочный расчет зубчатых передач и валов.
2.2.1 Проектировочный расчёт быстроходной ступени в системе «Восход».
2.3 Эскизная компоновка редуктора.
2.4 Проверочный расчет зубчатых передач.
2.5 Результаты расчетов напряжений, геометрических параметров выходной ступени с использованием автоматизированных систем расчета «АРМ» и «Восход».
2.6 Расчет (выбор) подшипников и уплотнений
2.6.1 Подшипники выходного вала
2.6.2 Подшипники входного вала
2.6.3 Подшипники промежуточного вала
2.7 Проверочные расчеты валов на прочность, жесткость и колебания
2.8 Результаты расчёта выходного вала в системе «APM WinMachine».
2.9 Расчет и конструирование корпуса и крепежных деталей
2.10 Тепловой расчет и смазка редуктора
3 Расчёт ременной передачи
4 Подбор, проверка и эскизная компоновка муфт
5 Расчет и проектирование тяговой звёздочки
Список используемой литературы
Целью данного курсового проекта является разработка привода цепного транспортера. Для этого были проделаны необходимые подсчёты с применением справочной литературы, методических указаний и автоматизированных методов выполнения проектно-проверочных расчётов.
Для приведения в движения привода цепного транстпортёра необходим двигатель.
Стандартные асинхронные двигатели переменного тока имеют простую прочную конструкцию и высокую степень защиты. Благодаря этому, даже при длительной эксплуатации в самых сложных условиях они обеспечивают безопасность и надежность приводной системы. Однако в любом случае решающим фактором успеха являются точное знание и соблюдение условий эксплуатации.
Стандартные двигатели переменного тока могут годами работать исправно, не нуждаясь в техническом обслуживании.
Руководствуясь вышесказанным, в начале проекта выбран, с учетом графика нагрузки, асинхронный двигатель 4A100L4Y3, для которого Nном.=4.0(кВт) nном.=1430(об/мин).
Дальнейшей разработкой привода является определение, как передаточного отношения самого привода, так и передаточного отношения редуктора. В свою очередь передаточное отношение редуктора, в соответствии с методическими указаниями, разбивается на передаточное отношение ступеней редуктора.
При проектировочном расчете зубчатых передач определяем межосевое расстояние, модуль и т.д. Для оптимизации зубчатой передачи, а вследствие и редуктора, то есть уменьшения габаритных размеров, нормальное соотношение размеров ступеней редуктора можно варьировать значением модуля, крутящим моментом, передаточным отношением, коэффициентом ширины колеса. В нашем случае будем выбирать минимальные ближайшие, стандартные значения величин.
Ручной расчет ведём только быстроходной ступени, а остальные ступени рассчитываем с применением автоматизированного варианта.
Дальнейшее проектирование сводится к проверочному расчёту зубчатой передачи. Выполняем проверочный расчёт на усталость по контактным напряжениям, проверочный расчёт по напряжениям изгиба, проверочный расчёт на заданную перегрузку.
Для выполнения эскизной
компоновки редуктора необходимо знать геометрические параметры элементов.
Находим диаметры валов в зависимости от крутящего момента и ![]() - допустимое касательное напряжение.
Находим диаметры валов, заплечики под колесо и подшипник. Для того, что бы
колесо ни скользило по валу и передавало на вал крутящий момент, рассчитываем
шпонку. И для того, что бы колесо сидело на валу и при вращении никуда не
смещалось, надеваем колесо на вал с натягом, для чего проводим соответствующий
расчет.
- допустимое касательное напряжение.
Находим диаметры валов, заплечики под колесо и подшипник. Для того, что бы
колесо ни скользило по валу и передавало на вал крутящий момент, рассчитываем
шпонку. И для того, что бы колесо сидело на валу и при вращении никуда не
смещалось, надеваем колесо на вал с натягом, для чего проводим соответствующий
расчет.
Для вращения вала с минимальными потерями энергии в опорах, применяются подшипники. Подшипники рассчитываем на статическую Со и динамическую грузоподъемность Сr, для этого определяем реакции опор на действие окружной и радиальной силы, в некоторых случаях также учитывается действие силы от муфты или шкива. Выбираем большую силу реакции опоры, учитывая коэффициент безопасности, требуемый ресурс работы, коэффициент надежности, тип подшипника, температурный коэффициент, коэффициент вращения, и т.д. находим динамическую грузоподъемность. После чего сравниваем расчетную грузоподъемность с табличным значением для данного подшипника. Если расчетная грузоподъемность оказывается меньше табличной, то такой подшипник принимаем, если оказывается больше табличной, то этот подшипник отбраковываем, а рассматриваем подшипник более тяжелой серии.
При проверочном расчете вала определяем два опасных сечения, в которых вал испытывает значительные нагрузки. Выявляем то, которое нагружено больше всего. Проверяем статическую прочность при перегрузках, жёсткость вала, расчёт на колебания. Находим критическую частоту вращения вала. Для нормальной работы необходимо, чтобы вал вращался в докритической области, иначе вся конструкция придет в негодность.
Для уменьшения трения в зубчатом зацеплении необходимы смазочные материалы, в нашем случае масло. Объем масла должен быть такой, чтобы колесо быстроходной ступени было погружено на высоту зуба.
В зависимости от окружной скорости вращения колеса и от sв выбирается вязкость масла, а по вязкости выбирается подходящая марка масла.
Для соединения выходного вала с исполнительным органом используем управляемую муфту, которая позволяет скомпенсировать несоосность валов. При ее расчете учитываем к.п.д. привода, частоту вращения, мощность двигателя, крутящий момент на тихоходном валу. В зависимости крутящего момента и диаметра вала из справочника выбираем подходящую муфту.
Для дальнейшей разработки и изготовления редуктора необходимо наглядное представление о нем. Для этого чертятся чертежи, по которым можно точно определить месторасположения каждой детали. По необходимости выполняются местные разрезы, выноски, тем самым улучшают представление о данном участке.
На завершающей стадии проектирования вычерчивается сборочный чертеж, по которому судят о расположении и взаимодействии отдельных элементов привода.
По выполнении проектирования делается анализ всех произведённых действий, рассматриваются желаемые, но не учтённые по техническим причинам параметры.
1 Кинематический расчёт привода
1.1 Выбор электрического двигателя
Определяем мощность на барабане по формуле:
N =F∙V, (1.1)
где F= 5000 Н – усилие на транспортёре;
V = 0.9 м/с – скорость цепи транспортёра.
Данные значения подставляем в формулу (1.1): N=5000∙0.9=4,5 (кВт)
Потребную мощность двигателя определяем по формуле:
![]()
![]() , (1.2)
, (1.2)
где ![]() - суммарный КПД привода
(значения берутся из таблицы - в ней КПД передач даны с учётом потерь энергии в
опорах валов этих передач на подшипниках качения, т.е. при вычислении
суммарного КПД привода, КПД пар подшипников не учитываются), вычисляемый по
формуле:
- суммарный КПД привода
(значения берутся из таблицы - в ней КПД передач даны с учётом потерь энергии в
опорах валов этих передач на подшипниках качения, т.е. при вычислении
суммарного КПД привода, КПД пар подшипников не учитываются), вычисляемый по
формуле:
![]() (1.3)
(1.3)
где ![]() =
=![]() - КПД муфты;
- КПД муфты; ![]() =
=![]() - КПД редуктора;
- КПД редуктора;
hрем.пер.=0.96 - КПД клиноремённой передачи.
Подставляем эти значения в формулу, получаем:
![]()
Тогда мощность двигателя равна:
![]() (кВт)
(кВт)
Определяем среднеквадратичную мощность двигателя, используя график нагрузки:
 ,
,
где Nn – значение мощностей в определенный момент цикла; t- время цикла.
 .
.
Частоту вращения ведомого вала определяем по формуле:
![]() , (1.4)
, (1.4)
где D0 –диаметр тяговой звёздочки, равный
 (мм)
(1.4а)
(мм)
(1.4а)
где t =100 мм – шаг тяговой звездочки, z =9 – число зубьев на звёздочке.
Данные значения подставляем в формулу (1.4а):
Из формулы (1.4) находим:
nВЫХ![]() (об/мин)
(об/мин)
Оцениваем возможное передаточное отношение привода
Uобщ=Uр.Uрем (1.5)
Задаем передаточное отношение ременной передачи: Uрем.=2, передаточное отношение редуктора:
Uр=U23∙U34; (1.5а)
где U23 – передаточное отношение быстроходной ступени редуктора (между валами 2 и 3); U34 – передаточное отношение тихоходной ступени редуктора (между валами 3 и 4).
Назначаем Uр
равным 16. Определяем U23 по соотношению ![]() [Дунаев
П.Ф., стр. 11]. По ряду стандартных значений U23=5, тогда
[Дунаев
П.Ф., стр. 11]. По ряду стандартных значений U23=5, тогда ![]() .
.
Отсюда, по формуле (1.5) определим Uобщ=16∙2=32.
Тогда требуемая частота вращения вала электродвигателя определяется по формуле:
nдв.н= nвых∙Uобщ. = 58,9.32 = 1884,8 (об/мин)
Nср.кв.<Nдв.<Nдв.н. (1.6)
![]() (1.6а)
(1.6а)
Из соотношений (1.6) и (1.6а) выбираем двигатель 4A100L4Y3, для которого Nдв.= 4 (кВт), nдв.= 1430 (об/мин).
1.2 Расчёт кинематических, силовых и энергетических параметров на отдельных валах
Уточняем передаточные отношения:
![]()
![]()
Определяем U23
по соотношению ![]() [Дунаев П.Ф.,
стр. 11]. По ряду стандартных значений U23=4, тогда
[Дунаев П.Ф.,
стр. 11]. По ряду стандартных значений U23=4, тогда ![]() .
.
Определение кинематических, силовых и энергетических параметров на отдельных валах.
На первом валу (быстроходный вал привода):
N1=Nдв.=4 (кВт) n1=nдв.=1430 (об/мин)
![]()
![]() (Н.м)
(Н.м)
На втором валу (быстроходный вал редуктора):
N2=N1∙![]() =4∙0,96=3,84(кВт)
=4∙0,96=3,84(кВт)
n2=![]() =715(об/мин)
=715(об/мин)
![]()
![]() (Н.м)
(Н.м)
На третьем валу (промежуточный вал редуктора):
N3=N2∙![]() =3,84. 0,97=3,72(кВт)
=3,84. 0,97=3,72(кВт)
n3=![]() =180,6 (об/мин)
=180,6 (об/мин)
![]()
![]() (Н.м)
(Н.м)
На четвёртом валу (тихоходный вал редуктора):
N4=N3∙![]() =3,72∙0,97=3,61(кВт)
=3,72∙0,97=3,61(кВт)
n4 =![]() =57,3(об/мин)
=57,3(об/мин)
![]()
![]() (Н.м)
(Н.м)
На пятом валу (тихоходный вал привода):
N5 =N4∙![]() =0,99∙3,61=3,58(кВт)
=0,99∙3,61=3,58(кВт)
n5 =![]() =57,3(об/мин)
=57,3(об/мин)
![]()
![]() (Н.м)
(Н.м)
Кинематические, cиловые и энергические параметры элементов привода занесём в таблицу 1.
Таблица 1
| Параметры | Обознач. | Разм. | Валы | |||||||
| 1 | 2 | 3 | 4 | 5 | ||||||
| Крутящий момент | Т | Н.м | 26,5 | 50,9 | 188,8 | 601,7 | 596,7 | |||
| Частота вращения | n | Об/мин | 1430 | 715 | 180,6 | 57,3 | 57,3 | |||
| Угловая скорость |
|
рад/с | 151,2 | 75,6 | 19,7 | 6 | 6 | |||
| Мощность | N | кВт | 4 | 3,84 | 3,72 | 3,61 | 3,58 | |||
| Передаточное отношение | U | 2 | 4 | 3,15 | 1 | |||||
1.3 Расчёт привода в Автоматизированный системах «Восход», «Кинематик»
В системе «Восход»
Исходные данные
Цилиндр.горизонтальный соосный редуктор
Мощность тихох.вала привода,квт 4.5
Частота вращения тихох.вала привода,мин-1 58.9
Общее передаточное число привода 32
Перед.число ременной передачи 2
Результаты расчета
Тип выбранного эл./двиг. 4a112m4y3
Мощность выбранного эл./двиг. 5.5 квт
Частота вращения эл./двиг. 1445 мин-1
Действ.перед.число редуктора 12.60
Перед.число быстрох.ступени 4.00
Перед.число тихоходной ступени 3.15
Перед.число ременной передачи 2.00
В системе «Кинематик».
Таблица расчетных значений
Приблизительное общее передаточное отношение
привода Usп=25.20
Общий КПД привода Ns=0.88
Приблизительная мощность двигателя Pдвп=5.14(кВт)
Приблизительная частота вращения вала электродвигателя
ndп=1484(об/мин)
Тип электродвигателя - 4A100L4УЗ
Мощность электpодвигателя Рдв=4.00(кВт)
Частота вpащения вала электpодвигателя nдв=1430(об/мин)
Отношение Тпуск/Тном=2.0
Отношение Тmax/Тном=2.4
Масса электpодвиготеля Мдв=42.0
Разбиение передаточного отношения pедуктоpа
по ступеням
Передаточное отношение быстроходной ступени pедуктоpа Uб=3.55
Передаточное отношение тихоходной ступени pедуктоpа Uт=3.15
Частота вpащения быстpоходного вала пpивода1430.00
Кpутящий момент на быстpоходном валу пpивода26.71
Частота вpащения быстpоходного вала pедуктоpа794.00
Кpутящий момент на быстpоходном валу pедуктоpа46.16
Частота вpащения 1-ого пpомежуточного вала pедуктоpа224.00
Кpутящий момент на 1-ом пpомежуточном валу pедуктоpа158.95
Частота вpащения тихоходного вала pедуктоpа63.00
Кpутящий момент на тихоходном валу pедуктоpа547.36
1.4 Сравнительный анализ результатов и выбор рационального варианта
| Параметры | Обозначение | Разм. | Метод | Валы | ||||
| 1 | 2 | 3 | 4 | 5 | ||||
| Крутящий момент | T | Н∙м | Ручной расчет | 26,5 | 50,9 | 188,8 | 601,7 | 596,7 |
| Кинемат | 26,71 | 46,16 | 224 | 547,36 | - | |||
| Частота вращения | n | 1/мин | Ручной расчет | 1430 | 715 | 180,6 | 57,3 | 57,3 |
| Кинемат | 1430 | 794 | 224 | 63 | 63 | |||
Вывод
Из таблицы сравнения результатов видно, что отклонения полученных результатов незначительны. Немного не сошлись величины, полученные для каждой отдельной ступени привода. Это может объясняться несколькими причинами. Например, несовершенством эмпирически полученных и выведенных формул. При автоматизированном расчете многие операции недоступны для пользователя, поэтому сделать проверку на каждом этапе работы невозможно. Так что действия, выполняемые программой мы увидеть не можем. При этом различным оказалось разбиение передаточного отношения по ступеням. С этой точки зрения, на мой взгляд, целесообразней взять вариант ручного расчета, так как здесь мы можем с большей лёгкостью варьировать рассчитываемые параметры.
2. Расчет и проектирование зубчатого редуктора
2.1 Выбор материалов зубчатых колес. Определение допускаемых напряжений
Назначаем сталь 40ХН (для колес) и 40ХН (для шестерней), причём для лучшей приработки зубьев твёрдость шестерни назначают больше твёрдости колеса не менее чем на 10-15 единиц. Термообработка для колёс улучшение, ориентировочный режим термообработки: закалка 820-8400 С, охлаждение в масле, отпуск 560-6000 С. Твёрдость 300 HB, предел текучести σт =600 МПа, предел прочности σв=850 МПа. Термообработка для шестерни закалка т.в.ч., ориентировочный режим термообработки: закалка 820-8400 С, охлаждение в масле, отпуск 180-2000 С. Твёрдость 47 HRC, предел текучести σт =1400 МПа, предел прочности σв=1900 МПа.
Допускаемые контактные напряжения:
 (2.1)
(2.1)
где σно- предел контактной выносливости,
Sн- коэффициент безопасности,
КHL- коэффициент долговечности.
Для колеса и шестерни предел контактной выносливости
σно=2НВ+70 МПа; (2.1а)
коэффициент безопасности Sн=1,1 (из таблицы 8.9 [3]).
Предельные допускаемые напряжения
[σн]MAX=2,8σт МПа; (2.2а)
[σF]MAX=2,74НВ МПа. (2.2б)
Определим пределы контактной выносливости для колеса и шестерни 2-й ступени по формуле (2.1а).
Для колеса НВ 300, σно=2∙300+70=670(МПа), для шестерни НВ 470, σно=2.470+70=1010(МПа).
Допускаемые контактные напряжения для 2-й ступени определяем по материалу колеса, как более слабому.
Число циклов напряжений для колеса 2-й ступени при переменной нагрузке:
 (2.3)
(2.3)
где ![]() - отношение
соответствующего момента цикла к максимальному из моментов, берем из графика
нагрузки,
- отношение
соответствующего момента цикла к максимальному из моментов, берем из графика
нагрузки,
ni – частота вращения выходного вала (ni=57,3 об\мин),
с – число зацеплений зуба за один оборот колеса(с равно числу колёс, находящихся в зацеплении с рассчитываемым).В нашем случае с=1,
ti – ресурс передачи.
ti=t.365.kг.24.kсут (2.3а)
t =7 – срок службы передачи (ч).
365.kг (kг=0,75) – количество дней работы передачи в году,
24.kсут (kсут=0,4) – количество часов работы передачи в сутки.
Подставим эти данные в формулу (2.3а), получим
ti=7∙365∙0,75∙24∙0,4=18396 (ч).
NНЕ=60∙18396∙57,3(13∙0,35+0,753∙0,3+0,43∙0,35)= 31557106,8≈3,15∙107.
По графику (рис. 8.40. [3]) для колёс при НВ 300 NH0=2,5.107. Сравнивая NHE и NH0, отмечаем, что для колеса 2-й ступени NHE> NH0 . Так как все другие колёса вращаются быстрее, то аналогичным расчётом получим и для них
NHE < NH0
. При этом для всех колёс передачи коэффициент долговечности  , где m-показатель, который
зависит от вида колёс, так как у нас цилиндрические, то m=6. Отсюда КHL=0.96.
, где m-показатель, который
зависит от вида колёс, так как у нас цилиндрические, то m=6. Отсюда КHL=0.96.
Допускаемые контактные напряжения определяем из формулы (2.1)
[σн]=584,7(МПа).
Допускаемые напряжения изгиба:
![]() (2.4)
(2.4)
где σFO- предел выносливости зубьев по напряжениям изгиба,
SF- коэффициент безопасности,
КFC-коэффициент, учитывающий влияние двустороннего приложения нагрузки.
КFL-коэффициент долговечности.
Для колеса и шестерни предел выносливости зубьев по напряжениям изгиба: σFO=1,8∙НВ (2.4а)
Коэффициент безопасности SF=1,75([3]). Для колеса 2-й ступени по формуле (2.4а) σFO=1,8∙300=540 (МПа). Для шестерни 2-й ступени по (2.4а) σFO=1,8∙470=846 (МПа). Число циклов напряжений для колеса 2-й ступени при переменной нагрузке, по аналогии с формулой (2.3):
 (2.5)
(2.5)
Отсюда NFE=3,15∙107. Рекомендуется принимать NFO=4∙106 для всех сталей.
NHE < NH0 . При этом коэффициент долговечности аналогично предыдущему расчету KFL =0,71.
Так как нагрузка на зубья действует только с одной стороны, то коэффициент КFC=1.
Допускаемые напряжения изгиба определяем из формулы (2.4)
для колеса [σFO]=353,6 (МПа),
для шестерни [σFO]= 554 (МПа).
Допускаемые напряжения при перегрузке:
Для колёс предельные контактные напряжения при перегрузке находим из формулы (2.2а), учитывая, что σт =850 МПа:
[σн]MAX=2,8∙850=2380(МПа)
Для колёс и шестерни предельные изгибные напряжения при перегрузке находим из формулы (2.2б), учитывая, что для колеса НВ 300, получим [σF]MAX=2,74∙300=822 (МПа), для шестерни при НВ 470 [σF]MAX=2,74∙470=1278,7 (МПа).
2.2 Проектировочный расчет зубчатых передач и валов
Рассчитаем 2-ю ступень как более нагруженную и в основном определяющая габариты редуктора.
Предварительный расчёт.
Условимся обозначать здесь и далее предварительно выбранные или рассчитанные параметры дополнительным индексом - штрих.
 (2.6)
(2.6)
где а'2 – межосевое расстояние,
U2 – передаточное отношение 2-й ступени редуктора,
Eпр – приведённый модуль упругости,
Т4 – крутящий момент на выходном 4-ом валу редуктора(Н.мм),
KHβ – коэффициент концентрации при расчётах по контактным напряжениям,
[σн] – допускаемые контактные напряжения,
ψba – коэффициент ширины колеса относительно межосевого расстояния.
Предварительно назначаем ψ'ba=0,4 (по таблице 8.4 [3]).
При этом по формуле ψ'bd=0,5.ψ'ba.(U+1) определим коэффициент ширины колеса относительно диаметра, ψ'bd=0,5∙0,4∙(3,15+1)=0,83<ψbdmax=1,5 и по графику (рис 8.15 [3]) находим коэффициент концентрации при расчётах по контактным напряжениям: KHβ≈1,04.
Модуль упругости стали Е1=Е2=2,1∙105 (МПа). Находим приведённый модуль упругости по формуле
Eпр=![]() . (2.6а)
. (2.6а)
По формуле (2.6) определяем межосевое расстояние: а 2 = 161,99 мм.
Округляем по ряду Ra 40
(стр.136 [3]) до а2=160 мм, находим ширину зубчатого венца колеса b'w=ψ'ba∙а3=0,4∙160=64
(мм). По таблице (8.5 [3]) принимаем ψ'm=25 (т.к. выходная
ступень самая нагруженная). Находим модуль ![]() .
.
По таблице(8.1 [3])
назначаем m=2,5 (мм). Суммарное число зубьев: ![]() =128;
принимаем z∑=128.
=128;
принимаем z∑=128.
Число зубьев шестерни:![]() =30,8 ( > Zmin
= 17), принимаем z1=31.
=30,8 ( > Zmin
= 17), принимаем z1=31.
Число зубьев колеса
определяем по формуле:![]() = 128 – 31=97.
= 128 – 31=97.
Фактическое передаточное
число:![]() = 97/31=3,13.
= 97/31=3,13.
Делительные диаметры шестерни и колеса:
d1=![]() mn=31∙2,5=77,5
(мм);
mn=31∙2,5=77,5
(мм);
d2=![]() mn=97∙2,5=242,5
(мм).
mn=97∙2,5=242,5
(мм).
Так как передача прямозубая и число зубьев шестерни и колеса больше 21, то коэффициент смещения для колеса и шестерни х1=0, х2=0.
Диаметр вершин зубьев для колеса и шестерни:
da=d+2 .m .(ha*+x-Δy), (2.7)
где d-делительный диаметр,
m-модуль,
ha*-коэффициент высоты головки зуба,
х- коэффициент смещения,
Δy- коэффициент уравнительного смещения.
Диаметр впадин зубьев для колеса и шестерни:
df=d-2 .m .(ha*+C*-x), (2.8)
где C*- коэффициент радиального зазора.
По ГОСТ 13755-81 ha*=1, C*=0,25. У нас передача без смещения, поэтому Δy=0.
По формуле (2.7) определяем диаметр вершин зубьев
для колеса da=242,5+2∙2,5∙1=247,5 (мм),
для шестерни da=77,5+2∙2,5∙1=82,5 (мм).
По формуле (2.8) определяем диаметр впадин зубьев
для колеса df=242,5-2∙2,5∙(1+0.25)=236,25 (мм),
для шестерни df=77,5-2∙2,5∙1(1+0.25)=71,25 (мм).
Проектировочный расчёт валов сводится к определению диаметров валов привода исходя из полученных значений крутящих моментов.
Расчет ведем по формуле:
![]() , (2.9а)
, (2.9а)
где Т- значения крутящих моментов,
![]() - допустимое
касательное напряжение.
- допустимое
касательное напряжение.
Принимаем ![]() , тогда получим следующие
значения:
, тогда получим следующие
значения:
Быстроходный вал привода:
![]() .
.
Быстроходный вал
редуктора:  .
.
Промежуточный вал
редуктора: ![]() .
.
Тихоходный вал редуктора:
![]()
Тихоходный вал привода: ![]() .
.
2.2.1 Проектировочный расчёт быстроходной ступени в системе «Восход»
Геометрия передачи
Нормальный (средний) модуль .... 1.0000 мм
Число зубьев шестерни ......... 64
Число зубьев колеса .......... 256
Действит.передаточное число ... 4.000
Расчетная ширина колес ....... 24.0 мм
Угол наклона зуба ............ 0.000 град
Коэф.смещения шестерни ......... 0.000
Коэф. Смещения колеса ......... 0.000
Делительный диаметр шестерни 64.0000 мм
Диаметр вершин зубьев шестерни 66.0000 мм
Диаметр впадин зубьев шестерни 61.5000 мм
Делительный диаметр колеса 256.0000 мм
Диаметр вершин зубьев колеса 258.0000 мм
Диаметр впадин зубьев колеса 253.5000 мм
Межосевое расстояние 160.0000 мм
Ширина зубчатого венца шестерни 26.0000 мм
Ширина зубчатого венца колеса 24.0000 мм
Расчетная степень точности 9
2.3 Эскизная компоновка редуктора
Проведем линии осей валов, изображаем контуры шестерни и колеса первой ступени. Рассчитываем входной вал. В пункте 2.2 рассчитан диаметр быстроходного вала редуктора d1=21,7 мм. В соответствии с рекомендациями (стр.164[4]) опоры устанавливаем по схеме «враспор». Учитывая, что от подшипников цилиндрических зубчатых колес не требуется повышенная жесткость, а осевые нагрузки относительно не велики, намечаем для обеих опор вала радиальные однорядные шарикоподшипники. Предварительно принимаем шарикоподшипники лёгкой серии №205: d=25 мм, D=52 мм, В=15 мм. По таблице 8.3[1] определяем диаметр заплечика для упора подшипника d4=31 мм. Сравнивая d4 с диаметром шестерни первой ступени d1=64 мм и учитывая рекомендации (стр. 328[1]), решаем изготавливать шестерню за одно целое с валом, так как раздельное изготовление увеличивает стоимость производства вследствие увеличения числа посадочных поверхностей, требующих точной обработки, а также за счёт необходимости применения того или иного соединения (например, шпоночного). Определяем длины участков входного вала. Зазор между колесом и внутренней стенкой корпуса по таблице 10.4[1]:
![]() (2.3.1)
(2.3.1)
где ![]() - толщина стенки основания
корпуса, находится по формуле:
- толщина стенки основания
корпуса, находится по формуле:
![]() (2.3.2)
(2.3.2)
где T4 – крутящий момент на тихоходном валу редуктора.
Тогда по формуле (2.3.2) ![]() мм. Принимаем
мм. Принимаем ![]() (мм). При этом по формуле
(2.3.1)
(мм). При этом по формуле
(2.3.1) ![]() (мм). Принимаем
(мм). Принимаем ![]() .
.
Рассчитываем размер гнезда подшипника
![]() , (2.3.3)
, (2.3.3)
где k1 – ширина фланца разъема корпуса, находится по формуле
![]() (2.3.4)
(2.3.4)
где d'2 –диаметр стяжных болтов, находим по формуле:
![]() (2.3.5)
(2.3.5)
где d'1 –диаметр фундаментных болтов, определяется по формуле:
![]() (2.3.6)
(2.3.6)
где T4-крутящий момент на тихоходном валу редуктора.
По формуле (2.3.6) ![]() =13.4мм. Принимаем по
таблице 2.4[1] болты М16, значение подставляем в формулу (2.3.5):
=13.4мм. Принимаем по
таблице 2.4[1] болты М16, значение подставляем в формулу (2.3.5): ![]() (мм). По ГОСТ 7808 – 76
принимаем болты М12, при этом по формуле (2.3.4):
(мм). По ГОСТ 7808 – 76
принимаем болты М12, при этом по формуле (2.3.4): ![]() (мм).
Тогда по формуле (2.3.3)
(мм).
Тогда по формуле (2.3.3) ![]() .
Принимаем накладные крышки гнёзд подшипников. Толщина фланца по таблице 10.5[1]
h1=12мм. Толщина прокладок
.
Принимаем накладные крышки гнёзд подшипников. Толщина фланца по таблице 10.5[1]
h1=12мм. Толщина прокладок ![]() .
Между торцом муфты и крышкой подшипника по рекомендации оставляем зазор h=8 мм.
Подсчитываем длину L2 шейки вала с номинальным диаметром d=31 мм.
Учитывая неровности и возможную неточность положения литой стенки, подшипник
отодвигают от стенки на
.
Между торцом муфты и крышкой подшипника по рекомендации оставляем зазор h=8 мм.
Подсчитываем длину L2 шейки вала с номинальным диаметром d=31 мм.
Учитывая неровности и возможную неточность положения литой стенки, подшипник
отодвигают от стенки на ![]() .
.
![]() =60+1,5+12+8-4,5=77 мм.
=60+1,5+12+8-4,5=77 мм.
Длину вала L1 с d=28 мм принимаем равным длине, необходимой для посадки шкива ременной передачи.
![]() (2.3.7)
(2.3.7)
L1=80+17+3=100 мм.
Длину участка d4 определяем как ширину шестерни (26 мм). Правый подшипник входного вала по условиям унификации принимаем таким же, как и левый, и устанавливаем симметрично относительно шестерни.
Рассчитываем
промежуточный вал. В пункте 2.2 рассчитан диаметр промежуточного вала под
колесо d5=33,5 мм. Принимаем диаметр под подшипник dп=35
мм. Предварительно принимаем шарикоподшипники лёгкой серии №207: d=35 мм, D=72
мм, В=17 мм. По таблице 8.3[1] определяем диаметр заплечика для упора
подшипника d′4=42 мм. Тогда принимаем диаметр под колесо d5=42
мм. Так как размер L остаётся одинаковым, то размеры d, D, ![]() остаются теми же. Учитывая
рекомендации, назначаем l=b1=24 мм, где b1-ширина колеса
входной ступени. Причем отношение
остаются теми же. Учитывая
рекомендации, назначаем l=b1=24 мм, где b1-ширина колеса
входной ступени. Причем отношение ![]() находится
в рекомендуемых пределах (рекомендация 10.3[1]). Усиливаем соединение колеса с
валом за счёт шпонки. По таблице 2.29[1] размеры поперечного сечения шпонки:
b=12 мм, h=8 мм.
находится
в рекомендуемых пределах (рекомендация 10.3[1]). Усиливаем соединение колеса с
валом за счёт шпонки. По таблице 2.29[1] размеры поперечного сечения шпонки:
b=12 мм, h=8 мм.
Рабочая длина шпонки:
![]() , (2.3.8)
, (2.3.8)
где [sсм] – допускаемое напряжение смятия,
h – толщина шпонки,
d5 – диаметр вала,
T3 – крутящий момент промежуточного вала редуктора.
Принимаем по
рекомендациям стр.90[3] [sсм] =150
МПа, тогда по формуле (2.3.8) ![]() .
.
Учитывая закругления концов шпонки, получаем:
l = lp+b =14,98+12 =26,98 мм.
По таблице 2.29[1] назначаем l=24 мм. Отмечаем, что длина ступицы достаточна для размещения шпонки, так как b1=24 мм.
Диаметр участка вала между колесом и шестерней:
d6=d5+3f (2.3.9)
где f-размер фаски.
По таблице стр.25[4] f=1,5, тогда по (2.3.9) d6=42+3·1,5=46,5 мм. Значение диаметра округляем в ближайшую сторону до стандартного значения по таблице 24.1[4], получаем d7=50 мм. Учитывая рекомендации, назначаем изготовление шестерни заодно с валом.
Рассчитываем выходной
вал. В пункте 2.2 рассчитан диаметр выходного вала под колесо d9=49,4
мм. Значение диаметра округляем в большую сторону до стандартного значения по
таблице 24.1[4], получаем d9=63 мм. Принимаем диаметр под подшипник
dп=55 мм. Предварительно принимаем шарикоподшипники лёгкой серии
№211: d=55 мм, D=100 мм, В=21 мм. По таблице 8.3[1] определяем диаметр
заплечика для упора подшипника d″′4=63 мм. Принимаем диаметр
вала под колесо d9=63 мм. Так как размер L остаётся одинаковым, то
размеры d, D, ![]() остаются теми
же. Учитывая рекомендации, назначаем l=b3=64 мм, где b3
– ширина колеса быстроходной ступени. Причем отношение
остаются теми
же. Учитывая рекомендации, назначаем l=b3=64 мм, где b3
– ширина колеса быстроходной ступени. Причем отношение ![]() находится в рекомендуемых
пределах. Усиливаем соединение колеса с валом за счёт шпонки. По таблице
2.29[1]: b=18 мм, h=11 мм.
находится в рекомендуемых
пределах. Усиливаем соединение колеса с валом за счёт шпонки. По таблице
2.29[1]: b=18 мм, h=11 мм.
Рабочая длина шпонки:
![]() , (2.3.12)
, (2.3.12)
где [sсм]-допускаемое напряжение смятия,
h – толщина шпонки,
d9 – диаметр вала,
T4 – крутящий момент выходного вала редуктора.
Принимаем по рекомендациям стр.90[3] [sсм] =190 МПа, тогда по формуле (2.3.12)
![]() .
.
Учитывая закругления концов шпонки, получаем: l=lp+b=18,3+18=36,3 мм.
По таблице 2.29[1] назначаем l=40 мм. Отмечаем, что длина ступицы достаточна для размещения шпонки, так как b3=64 мм.
Диаметр участка вала между колесом и шестерней:
d10=d9+3f (2.3.13)
где f-размер фаски.
По таблице стр.25[4] f=2, тогда по (2.3.9) d6=63+3·2=69 мм. Значение диаметра округляем в ближайшую сторону до стандартного значения по таблице 24.1[4], получаем d7=71 мм. Длину шейки вала с d11=dподшипника=55 мм определим: l=1,25·dподшипника=1,25·55=68,75 мм.
Полученный эскизный чертёж редуктора смотрите на рис.1.
2.4 Проверочный расчет зубчатых передач
Выполняем проверочный расчёт на усталость по контактным напряжениям.
 , (2.4.1)
, (2.4.1)
где Епр – приведённый модуль упругости (определён - см. формулу(1.6а)),
Т3 – крутящий момент на промежуточном 3-м валу(Н.мм),
αW – угол зацепления.
Предварительно определяем коэффициент расчётной нагрузки при расчётах по контактным напряжениям:
Кн=Кн β .Кнυ, (2.4.2)
где Кнβ – коэффициент концентрации нагрузки при расчёте по контактным напряжениям,
Кнυ – коэффициент динамической нагрузки при расчёте по контактным напряжениям.
Окружную скорость определяем по формуле:
υ=(π . d2 . n)/60=(3,14∙242,5∙57,3)/60=727 мм/c=0,73 м/с,
где d2 – делительный диаметр колеса (мм),
n – частота вращения выходного 4-го вала.
По таблице (8.2 М.Н. Иванов ”Детали машин”) назначаем 9-ю степень точности. По таблице (8.3 М.Н. Иванов ”Детали машин”) Кнυ=1,01. Ранее было найдено Кнβ=1,07. При этом по формуле (2.4.2): Кн=1,01 .1,07=1,08.
По формуле (2.4.1),
учитывая, что для нашего примера αW=200 ,![]() :
:
σн=563,8 МПа<[σн]=584,7 МПа.
Выполняем проверочный расчёт по напряжениям изгиба.
![]() , (2.4.3)
, (2.4.3)
где YF – коэффициент формы зуба,
Ft – окружная сила,
КF – коэффициент расчётной нагрузки при расчётах по контактным напряжениям,
bW – ширина зубчатого венца,
m – модуль.
По графику (рис.8.20 М.Н. Иванов ”Детали машин”) при х=0 находим:
для шестерни (z=31) YF=3,83;
для колеса (z=97) YF=3,75.
Предварительно определяем коэффициент расчётной нагрузки при расчётах по контактным напряжениям:
КF=КF β .КFυ, (2.4.4)
где КFβ – коэффициент концентрации нагрузки при расчёте напряжениям изгиба,
КFυ – коэффициент динамической нагрузки при расчёте по напряжениям изгиба.
Расчёт выполняем по тому
колесу пары, у которого меньше отношение ![]() .
В нашем случае для шестерни это отношение равно [σF]/3.83,
а для колеса - [σF]/3.75. Поэтому расчёт выполняем по
колесу.
.
В нашем случае для шестерни это отношение равно [σF]/3.83,
а для колеса - [σF]/3.75. Поэтому расчёт выполняем по
колесу.
По графику (рис.8.15 [3]) КFβ=1,15. По таблице (8.3 [3]) КFυ=1,04. Отсюда по формуле (2.4.4): КF=1,15 .1,04=1,2.
Далее определяем окружную силу Ft=2∙T3/d1= (2∙188,8∙103)/77,5=4872,3 (Н), где Т3 – крутящий момент на промежуточном 3-м валу(Н . мм),
d1 – делительный диаметр шестерни.
Отсюда по формуле(2.4.3) получаем: σF=140(МПа) < [σF]=554 (МПа).
Выполняем проверочный расчёт на заданную перегрузку (Тп/Тmax=2,5 по таблице 0.1[3]):
 (2.4.5)
(2.4.5)
σHmax = 891,4(МПа) < [σH]max =1540 (МПа).
 (2.4.6)
(2.4.6)
σFmax = 221,4 (МПа) < [σF]max =822 (МПа).
Условия прочности выполняются.
Результаты автоматизированного расчёта выходной ступени в системе APM WinMachine даны в рис.2- 6.
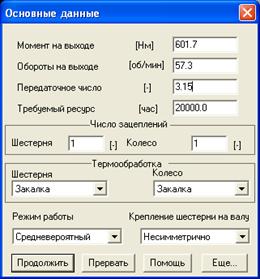
рис. 2 Ввод основных данных для расчёта выходной ступени
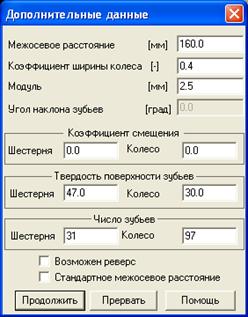
рис. 3 Ввод дополнительных данных для расчёта выходной ступени

рис. 4 Основные геометрические параметры выходной ступени

рис. 5 Параметры материалов выходной ступени
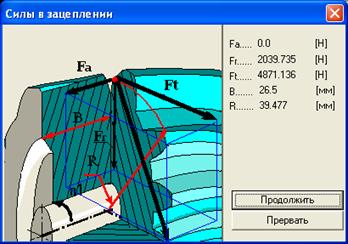
рис. 6 Силы в зацеплении в выходной ступени
Автоматизированный расчёт выходной ступени в системе «ВОСХОД».
Основные результаты расчета
Допускаемые напряжения:
Контактные ....................... 612 мпа
Изгибные для шестеpни ............ 285 мпа
Изгибные для колеса .............. 280 мпа
Допуск. Напряжения при перегрузке:
Контактные ....................... 2380 мпа
Изгибные для шестерни ........... 1430 мпа
Изгибные для колеса ............. 822 мпа
Рабочие напряжения:
Контактные ...................... 522 мпа
Изгибные для шестерни ........... 148 мпа
Изгибные для колеса ............. 154 мпа
Рабочие напряжения при перегрузке:
Максим.контактные напряжение ... 738 мпа
Максим.изгибные напряж.шестерни . 295 мпа
Максим.изгибные напряж.колеса ... 307 мпа
Геометрия передачи
Нормальный (средний) модуль .... 2.5000 мм
Число зубьев шестерни ......... 31
Число зубьев колеса .......... 97
Действит.передаточное число ... 3.129
Расчетная ширина колес ....... 64.0 мм
Угол наклона зуба ............ 0.000 град
Коэф.смещения шестерни ......... 0.000
Коэф. Смещения колеса ......... 0.000
Делительный диаметр шестерни 77.5000 мм
Диаметр вершин зубьев шестерни 82.5000 мм
Диаметр впадин зубьев шестерни 71.2500 мм
Делительный диаметр колеса 242.5000 мм
Диаметр вершин зубьев колеса 247.5000 мм
Диаметр впадин зубьев колеса 236.2500 мм
Межосевое расстояние 160.0000 мм
Ширина зубчатого венца шестерни 70.0000 мм
Ширина зубчатого венца колеса 64.0000 мм
Расчетная степень точности 9
Для сравнения полученных результатов расчёта напряжений, геометрических параметров выходной ступени ручным и автоматизированным вариантом, воспользуемся таблицей 3.
Таблица 3. Сравнительный анализ полученных результатов расчёта напряжений, геометрических параметров выходной ступени.
| Параметр | Ручной расчёт | Расчёт в системе «ВОСХОД» | расчёт в системе APM WinMachine | |
| 1. Допускаемые контактные напряжения, МПа | 584,7 | 612 | 622,386 | |
| 2.Допускаемые напряжения изгиба, МПа | шестерни | 554 | 285 | 352,941 |
| колеса | 353,6 | 280 | 352,941 | |
| 3.Допускаемые контактные напряжения при перегрузке, МПа | 2380 | 2380 | - | |
| 4. Допускаемые изгибные напряжения при перегрузке, МПа | Шестерни | 1278,7 | 1430 | - |
| Колеса | 822 | 822 | - | |
| 5.Рабочие контактные напряжения, МПа | 563,8 | 522 | 616,71 | |
| 6.Рабочие напряжения изгиба колеса, МПа | 140 | 154 | 173,27 | |
| 7.Рабочие контактные напряжения при перегрузке, МПа | 891,4 | 738 | - | |
| 8.Рабочие напряжения изгиба при перегрузке, МПа | 221,4 | 307 | - | |
| 9.Нормальный(средний модуль), мм | 2,5 | 2,5 | 2,5 | |
| 10.Число зубьев | шестерни | 31 | 31 | 31 |
| колеса | 97 | 97 | 97 | |
| 11.Действителбное передаточное число | 3,129 | 3,129 | 3,129 | |
| 12.Угол наклона зуба | 0 | 0 | 0 | |
| 13.Коэффициент смещения | шестерни | 0 | 0 | 0 |
| Колеса | 0 | 0 | 1,268 | |
| 14.Делительный диметр, мм | шестерни | 77,5 | 77,5 | 77,5 |
| колеса | 242,5 | 242,5 | 242,5 | |
| 15.Диаметр вершин зубьев, мм | шестерни | 82,5 | 82,5 | 82,162 |
| колеса | 247,5 | 247,5 | 253,5 | |
| 16.Диаметр впадин зубьев,мм | шестерни | 71,25 | 71,25 | 71,25 |
| колеса | 236,25 | 236,25 | 242,589 | |
| 17.Межосевое расстояние, мм | 160 | 160 | 163 | |
| 18.Ширина зубчатого венца колеса, мм | 64 | 64 | 49 | |
| 19.Расчётная степень точности | 9 | 9 | 9 | |
| 20. Окружная сила, Н | 4872,3 | - | 4871,136 | |
Как видно из таблицы, значительных расхождений расчётных величин нет. Наибольший разброс значений наблюдается между данными, рассчитанными вручную или в «Восходе», и полученными в APM величинами (относительная погрешность до 10%). Различия в рассчитанных напряжениях, я думаю, появились из-за использования различных таблиц соотношений параметров материалов. К тому же APM и «Восход» не полностью учитывают особенности распределения нагрузки во времени, вид которой нельзя передать этим программам.
2.6. Расчет (выбор) подшипников и уплотнений
Проверяем подшипники, предварительно назначенные в пункте 2.3.
2.6.1 Подшипники выходного вала
Были назначены радиальные однорядные шарикоподшипники лёгкой узкой серии №211 с параметрами: динамическая грузоподъёмность C=34000 Н, статическая грузоподъёмность C0=25600 Н, Lh – 20000 часов (по таблице 16.4[3]), t<100˚C.
Определим силы в зацеплении: Ft=2T/d=2·601,7/0,2425=4962,5 Н, Fa=Ft·tgβ=Ft·tg0˚=0 Н, Fr=Ft·tgα=Ft·tg20˚=1806,2 Н.
Расчёт на выносливость
 (2.6.1),
(2.6.1),
Где сд – динамическая грузоподъёмность подшипника (эквивалентная радиальная нагрузка, которую подшипник выдержит 106 циклов при работе без отказа с вероятностью 90%);
P – эквивалентная нагрузка;
p – показатель степени (для шарикоподшипников равен 3);
a1 – коэффициент надёжности (у нас равен 1);
a23 – коэффициент работы (в нашем случае равен 1);
L – ресурс в миллионах оборотов.
P=(XVFr+YFa)·kδ·kt (2.6.2),
где V – коэффициент вращения кольца (в нашем случае равен 1);
X, Y – коэффициенты совместного влияния нагрузок;
kδ – коэффициент безопасности (учитывает условия работы);
kt – температурный коэффициент (для t<100˚C равен 1).
Ресурс в миллионах оборотов выражается через долговечность формулой:
 (2.6.3)
(2.6.3)
Осевая нагрузка равна нулю, тогда по таблице 16.5[3] X=1, Y=0. По рекомендации к формуле 16.29[3] принимаем kδ=1,4.
Рассчитаем эквивалентную
нагрузку по (2.6.2): Р=(1·1·1806,2+0)·1·1,4=2528,7 Н.
Найдём ресурс подшипника ![]() (млн.
оборотов). Отсюда динамическая грузоподъёмность подшипника
(млн.
оборотов). Отсюда динамическая грузоподъёмность подшипника 
Условие Сд<[Сд]=Спаспортное=34000 Н выполняется, значит, увеличивать серию по ширине не придётся.
Проверка на статическую грузоподъёмность не проводится из-за большой окуружной скорости на валах.
2.6.2 Подшипники входного вала
Были назначены радиальные однорядные шарикоподшипники лёгкой узкой серии №205 с параметрами: динамическая грузоподъёмность C=14000 Н, статическая грузоподъёмность C0=6950 Н, Lh – 20000 часов (по таблице 16.4[3]), t<100˚C.
Определим силы в зацеплении: Ft=2T/d=2·50,9/0,064=1590,6 Н, Fa=Ft·tgβ=Ft·tg0˚=0 Н, Fr=Ft·tgα=Ft·tg20˚=578,9 Н.
Коэффициенты X, Y, kδ,
kt, а1, а23 для формул (2.6.1) и (2.6.2)
остаются прежними. Рассчитаем эквивалентную нагрузку по формуле (2.6.2): Р=(1·1·578,9+0)·1,4·1=810,5
Н. Найдём ресурс подшипника ![]() (млн.
оборотов). Отсюда динамическая грузоподъёмность подшипника
(млн.
оборотов). Отсюда динамическая грузоподъёмность подшипника ![]()
Условие Сд<[Сд]=Спаспортное=14000 Н выполняется, значит, увеличивать серию по ширине не придётся.
2.6.3 Подшипники промежуточного вала
Были назначены также радиальные однорядные шарикоподшипники лёгкой узкой серии №207 с параметрами: динамическая грузоподъёмность C=20100 Н, статическая грузоподъёмность C0=13900 Н, Lh – 20000 часов (по таблице 16.4[3]), t<100˚C.
Определим силы в зацеплении: Ft=2T/d=2·188,8/0,0775=4872,3 Н, Fa=Ft·tgβ=Ft·tg0˚=0 Н, Fr=Ft·tgα=Ft·tg20˚=1773,4 Н.
Коэффициенты X, Y, kδ,
kt, а1, а23 для формул (2.6.1) и (2.6.2)
остаются прежними. Рассчитаем эквивалентную нагрузку по формуле (2.6.2): Р=(1·1·1773,4+0)·1,4·1=2482,7
Н. Найдём ресурс подшипника ![]() (млн.
оборотов). Отсюда динамическая грузоподъёмность подшипника
(млн.
оборотов). Отсюда динамическая грузоподъёмность подшипника 
Условие Сд<[Сд]=Спаспортное=20100 Н выполняется, значит, увеличивать серию по ширине не придётся.
2.7 Проверочные расчеты валов на прочность, жесткость и колебания
Для выходного вала редуктора рассчитаны следующие величины: Т4=601,7 Н·м, n5=57,3 об/мин, ширина колеса: b3=64 мм, предел прочности sв=850 МПа, диаметр вала в месте посадки колеса считаем 55 мм. Диаметр колеса – 256 мм.
Выбираем материал вала сталь 45, улучшенная. [t]=19 МПа, предел текучести sт = 450 МПа, предел прочности sв=750 МПа. Запишем геометрические параметры вала (см. рис. 7): a=60 мм, b=60 мм, c=55 мм, l=a+b=120 мм. Вал нагружен силами Ft=2T/d=2·601,7/0,2425=4962,5 Н, Fa=Ft·tgβ=Ft·tg0˚=0 Н, Fr=Ft·tgα=Ft·tg20˚=1806,2 Н, действующими в полюсе зацепления, и крутящим моментом Т4 на выходном конце муфты.
Определяем допускаемую радиальную нагрузку на выходном конце вала, полагая, что редуктор общего назначения(с. 298[3]):
![]() (2.7.1)
(2.7.1)
Для Т4=601,7 получим FM=250·24,5=6125 Н.
Определяем реакции в опорах и строим эпюры изгибающих и крутящих моментов (см. рис. 7).
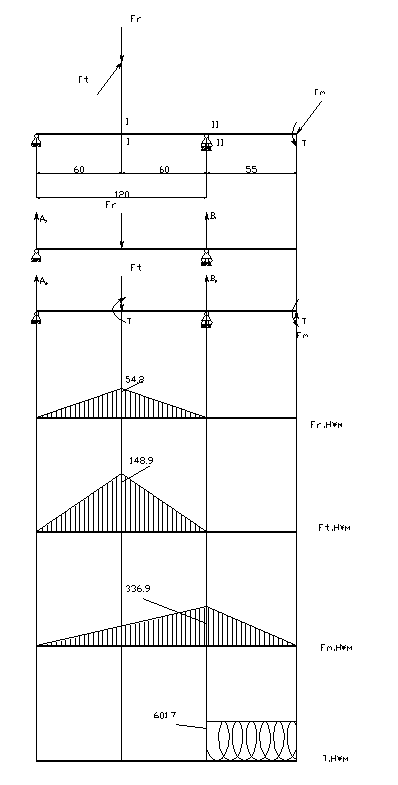
рис. 7 Эпюры нагрузок выходного вала
Рассмотрим реакции от
силы Fr, действующей в вертикальной плоскости. Сумма проекций Fr=A1+B1.
Сумма моментов относительно опоры А: -Fr·a+B1·l=0.
Из последнего равенства получим B1=![]() =1926,5∙0,5=963,25
Н. Тогда A1=Fr-B1=1926,3-963,25=963,25 Н.
=1926,5∙0,5=963,25
Н. Тогда A1=Fr-B1=1926,3-963,25=963,25 Н.
Реакция от сил Ft и FM, действующих в горизонтальной плоскости (FM прикладываем так, чтобы она увеличивала прогиб от Ft – худший случай). Проекции сил A2+B2+FM-Ft=0; сумма моментов: -Ft·a+B2·l+FM·(l+c)=0. Тогда рассчитаем: B2=Ft·a/l - FM·(l+c)/l=4962,5·0,5 – 6125·175/120= -6451 Н. Знак «-» значит, что реальная реакция направлена противоположно тому направлению, которое мы выбрали. A2=Ft-FM-B2= 5288,5 Н.
Для построения эпюр крутящих и изгибающих моментов воспользуемся формулами со страницы 298[3].
Момент от радиальной силы
![]() (2.7.2)
(2.7.2)
Момент от окружной силы
 (2.7.3)
(2.7.3)
Момент от силы на выходном конце вала
![]() (2.7.4)
(2.7.4)
Рассчитаем эти значения:
![]()
![]()
![]()
Расчёт на прочность. Просчитываем два предполагаемых опасных сечения (см. рис. ): сечение I-I под колесом, ослабленное шпоночным пазом, и сечение II-II рядом с подшипником, ослабленное галтелью по формуле
![]() (2.7.5)
(2.7.5)
где ![]() - запас сопротивления
усталости только по изгибу; (2.7.6)
- запас сопротивления
усталости только по изгибу; (2.7.6)
![]() - запас сопротивления усталости только по кручению;
- запас сопротивления усталости только по кручению;
В этих формулах σа и τa – амплитуды переменных составляющих циклов напряжений, а σm и τm – постоянные составляющие. ψσ и ψτ – коэффициенты, корректирующие влияние постоянной составляющей цикла напряжений на сопротивление усталости. σ-1 и τ-1 – пределы выносливости. Kd, KF – масштабный фактор шероховатости поверхности; Kσ и Kτ – эффективные коэффициенты концетрации напряжений при изгибе и кручении.
Для первого сечения изгибающий момент
 (2.7.7)
(2.7.7)
Подставим числовые значения и получим
![]() .
.
Крутящий момент Т=601,7·103 Н·мм.
Напряжение изгиба ![]()
Напряжение кручения ![]()
Определим пределы выносливости по приближённым формулам:
σ-1=0,4 σв=0,4·850=340 МПа; (2.7.8)
τ-1=0,2 σв=0,2·850=170 МПа.
По таблице 15.1[3] Kσ≈1,7 и Kτ≈1,4. По графику (см. рис. 15.5, кривая 2[3]), Kd=0,68. По графику (см. рис. 15.6[3]) для шлифованного вала KF=1. Из рекомендаций (стр. 300[3]) ψσ=0,1 и ψτ=0,05.
При расчёте валов σm=0; σa=M/(0,1d3)=σи=19,35 МПа; τm=τa=0,5τ=9,05 МПа.
Тогда по формулам (2.7.6) получим
![]()

Тогда по соотношению
(2.7.5) получим ![]() .
.
Для второго сечения
изгибающий момент ![]() ; крутящий момент
Т=601,7 Н·мм.
; крутящий момент
Т=601,7 Н·мм.
Напряжение изгиба ![]()
Напряжение кручения ![]()
Принимаем радиус галтели
r=2 мм; r/d≈0,03 и находим по таблице 15.1[3] Kσ≈2,3
и Kτ≈1,7. Тогда по формулам (2.7.6) получим 
![]() .
.
Таким образом, по (2.7.5)
![]() .
.
Больше напряжено второе сечение.
Проверяем статическую прочность при перегрузках для второго опасного сечения по формуле:
![]()
![]() (2.7.9)
(2.7.9)
Где σи=M/(0,1d3), (2.7.10)
τ=T/(0,2d3)
Здесь М и Т – изгибающий и крутящий моменты в опасном сечении при перегрузке.
Предельное допускаемое напряжение [σ] принимают близким к пределу текучести σТ: [σ]≈0,8σT (2.7.11)
При перегрузках напряжения удваиваются, тогда для второго сечения
![]() и
и ![]() По (2.7.11) [σ]≈0,8·450=360 МПа. В
таком случае по (2.7.9)
По (2.7.11) [σ]≈0,8·450=360 МПа. В
таком случае по (2.7.9) ![]() .
Условие статической прочности выполняется.
.
Условие статической прочности выполняется.
Расчёт на жёсткость. По условиям работы зубчатого зацепления опасным является прогиб вала под колесом. Для определения прогиба воспользуемся таблицей 15.2[3]. Средний диаметр на участке l (см. рис. 2.7.1) принимаем равным dш=55 мм. Здесь момент инерции сечения
![]() (2.7.12)
(2.7.12)
Прогиб в вертикальной плоскости от силы Fr
![]() (2.7.13)
(2.7.13)
Прогиб в горизонтальной плоскости от сил Ft и FM:
 (2.7.14)
(2.7.14)
Суммарный прогиб
![]() (2.7.15)
(2.7.15)
Допускаемый прогиб по рекомендации на стр. 302[3] [y]≈0,01m=0,01·2,5=0,025мм>0,0044 мм. Необходимое условие работы вала – y<[y] – выполняется.
Расчёт на критические колебания. Пределы, в которых не должна находится частота вращения выходного вала:
0,7nкр≤nвала≤1,3nкр (2.7.16)
Значение критической частоты тихоходного вала определяется по формуле:
 (2.7.17)
(2.7.17)
Массу вала определяем по формуле:
![]() (2.7.18)
(2.7.18)
где ρ – плотность стали (равна 7,8 г/см3), V – объём вала.
Объём вала
 (2.7.19)
(2.7.19)
где dш – диаметр вала под подшипник; l – длина вала.
Вычислим по последней
формуле ![]() . Тогда по (2.7.18) m=2220
г=2,22 кг.
. Тогда по (2.7.18) m=2220
г=2,22 кг.
c – динамический прогиб вала определяется из завичимости:
![]() (2.7.20)
(2.7.20)
Учитывая ранее полученные
Е=2,1·1011Па и J=87,6·10-8 мм4,
получим ![]() , откуда по формуле
(2.7.17) рассчитаем nкр=13907,5 об/мин. Таким образом, выполняется
условие (2.7.16) и вал работает в докритических частотах.
, откуда по формуле
(2.7.17) рассчитаем nкр=13907,5 об/мин. Таким образом, выполняется
условие (2.7.16) и вал работает в докритических частотах.
2.8 Результаты расчёта выходного вала в системе «APM WinMachine»
Результаты автоматизированного расчёта для выходного вала приведены на рисунках 8-10.
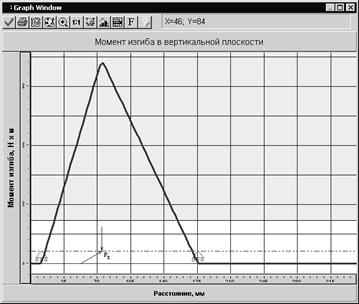
рис. 8 Момент изгиба в вертикальной плоскости для выходного вала
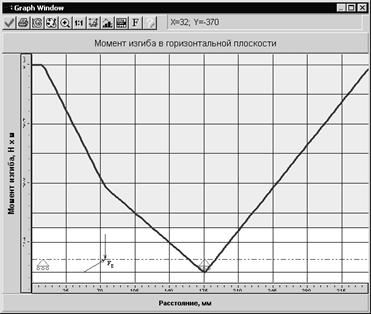
рис. 9 Момент изгиба в горизонтальной плоскости для выходного вала
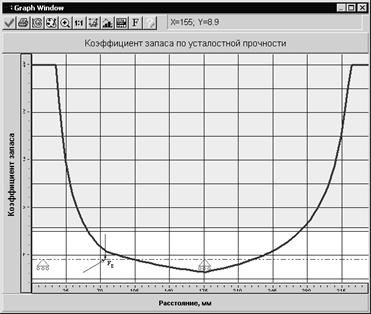
рис. 10 Коэффициент запаса по усталостной прочности для выходного вала
2.9 Расчет и конструирование корпуса и крепежных деталей
Основные размеры редуктора рассчитаны в пункте 2.3. Рассчитываем дополнительные размеры корпуса по следующим формулам и зависимостям.
Определим высоту центров:
h=1,06·aт=1,06·160=169,6 (мм) (2.9.1)
где ат- межосевое расстояние тихоходной ступени. По таблице 10.6[1] размер h округляем до ближайшего размера, получаем h=180(мм).
Толщина стенок корпуса
редуктора ![]() , откуда δ=9.
Округляя, назначим δ=10.
, откуда δ=9.
Округляя, назначим δ=10.
Элементы корпуса должны сопрягаться одинаковым радиусом: r=0,25δ=0,25·10=2,5(мм) (2.9.2)
где δ-толщина стенки основания корпуса. Толщина крышки корпуса: δ1=0,9· δ=0,9·10=9(мм) (2.9.3)
где δ-толщина стенки основания корпуса.
Зазор между внутренними стенками корпуса и поверхностями вращающихся деталей a=1,2δ=12 мм.
2.10 Тепловой расчет и смазка редуктора
По рекомендации (гл.IX [1]) выбираем глубину погружения колеса первой ступени на две высоты зуба, но не менее 10мм: 2·2,25·m=2·2,25·1=4,5 мм. Принимаем глубину 10 мм с учетом ее уменьшения из-за разбрызгивания масла и прилипания его к стенкам корпуса и другим деталям. Глубина погружения тихоходного колеса:
 (2.10.1)
(2.10.1)
где d2′-делительный диаметр колеса быстроходной ступени,
d2′′- делительный диаметр колеса тихоходной ступени.
Тогда по рис.1 d2′=256 мм, d2′′=242,5 мм, и по формуле (2.10.1)

По значениям окружных
скоростей колес при sв=850
МПа=86,7 ![]() (табл. 9,5[1]), находим
соответствующую вязкость масла: 270 сст. По таблице 9.1[1] выбираем по вязкости
автотракторное масло АК-15. Проводим тепловой расчёт.
(табл. 9,5[1]), находим
соответствующую вязкость масла: 270 сст. По таблице 9.1[1] выбираем по вязкости
автотракторное масло АК-15. Проводим тепловой расчёт.
Проводим тепловой расчет. Находим тепловую мощность
![]() (2.10.2)
(2.10.2)
где Р1 = 3,84 Вт – мощность на входном валу.
h = 0,972 – КПД зубчатой передачи.
![]()
Через стенки корпуса редуктора тепло передается в окружающую среду, тем самым происходит естественное охлаждение. Количество теплоты, отданной в секунду или мощность теплоотдачи:
![]() (2.10.3)
(2.10.3)
где k – коэффициент теплоотдачи, принимаем k = 18 Вт/м2 ×°С,
А – площадь поверхности охлаждения:
![]() (2.10.4)
(2.10.4)
где S1 = 0,920 × 0,250 = 0,23 м2 – площадь поверхности днища, которая учитывается, т.к. редуктор свободно обдувается воздухом.
S2 = 0,920 × 0,012 = 0,011 м2 - площадь боковой стороны редуктора соприкасаемая с маслом.
S3 = 0,250 × 0,012 = 0,003 м2 – площадь торцевой стороны редуктора соприкасаемая с маслом.
S4 = 0,005 × 0,3 × 2 = 0,003 м2 – площадь ребер охлаждения.
Подставляем значения в формулу (2.10.4): А = 0,23+0,011+0,003+0,003 = 0,247 м2
t0 = 20°C – температура окружающего воздуха,
t1 = 90°C – внутренняя температура редуктора или температура масла.
Подставляем значения в формулу 2.10.3:
![]()
Необходимое условие ![]() выполнено.
выполнено.
Естественного охлаждения достаточно.
Удаление масла производится через сливную масленую пробку М24х1,5 ГОСТ 9833-73.
Контроль уровня масла производим с помощь трубчатого масло указателя Н = 210мм.
По графику рис.12.23 [3] выбираем сечение ремня. Рекомендуют сечение А. По графику рис.12.25 [3], учитывая рекомендацию 12.31 [3], принимаем dр1=190 мм и находим Р0=3 кВт. Рассчитываем геометрические параметры передачи: dр2= dр1.iрем=190.2=380 мм, по ряду Ra40 принимаем dр2=400 мм. По рекомендации 12.29[3] предварительно принимаем а9= dр2 =400 мм. По формуле: l=2.a+0.5π(d1+d2)+(d1-d2)2/4∙a (3.1)
находим: l=2.400+0.5π(400+190)+(400-190)2/4∙400=1753,8 мм.
По таблице 12.2 принимаем l=1800 мм.
По формуле:
![]() , (3.2)
, (3.2)
где l - длинна ремня, l=1800 мм,
d1 и d2 - диаметры соответствующих шкивов, d1=400 мм и d2=190 мм,
а - межосевое расстояние,
уточняем:
![]()
По формуле: a=1808-57(d2-d1)/a=1808-57(400-190)/423,8=151,88 (3.3)
вычисляем угол обхвата ремня малого шкива. Значение находится в допускаемых пределах (см.рекомендации.12.29[3]).
По формуле: Pp=P0.Ca.Cl.Ci/Cp, (3.4), где Сa - коэффициент угла обхвата. Здесь Сa=0.925 (см. стр.272[3]),
Сl - коэффициент длинны ремня, по рис.12.27[3] Сl=1,03,
Ci - коэффициент передаточного отношения, по рис.12.28[3] Ci=1.125,
Cp - коэффициент режима нагрузки, учитывая, что нагрузка с умеренными колебаниями, принимаем Cp=1.2, определяем мощность Рр передаваемую одним ремнем: Pp=3.0.925.1,03.1.125/1.2=2,7 кВт
По формуле: Z=P/Pp.Cz, (3.5), где P - мощность на ведущем валу передачи, Cz - коэффициент числа ремней, Cz=1, так как 1 ремень, определяем число ремней. Z=3,84/2,7.1=1,42,условие z[6 выполняется.
По формуле: F0=0.85.P.CP.Cl!(Z.y.Ca.Ci)+Fy, (3.6), где Fy=r.A.y2 - центробежная сила, А - площадь сечения, А=138.10-6 м2, r=1250 кг/м3, y - скорость ремня при расчетной частоте вращения: y=π.dp1.n1/60=3.14.0.19.1430/60=14,4 м/с, Fy=1250.138.10-6.14,42535,6 H, находим предварительное натяжение ремня: F0=0.85.3,84.103.1.2.1,03!(1.14,4.0.925.1.125)+35,6=304,8 H.
По формуле:
![]() , (3.7)
, (3.7)
сила, действующая на вал при b/2=(180-a)/2=(180-151,8)/2=14,1, в статическом состоянии передачи: Fr=2.304,8.cos14,185591,2 H,
при n51430 мин-1 Fr=591,2-2.Fv.Z=591,2-2.35,6.1=520 H
В нашем случае влияние центробежных сил мало.
Ресурс наработки ремней находим по формуле: T=Tcp.k1.k2, (3.8)
где k1 - коэффициент режима нагрузки, k1=1,
Тср - ресурс наработки для эксплуатации при среднем режиме нагрузки, Тср=2000ч.,
k2 - коэффициент климатических условий, k2=1.
Т= Тср=2000ч.
Расчёт ременной передачи в «APM WinMachine».
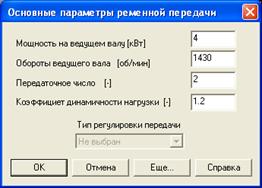
рис. 11 Ввод данных для расчёта ременной передачи
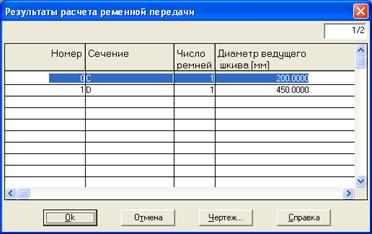
рис. 12 Результаты расчёта ременной передачи
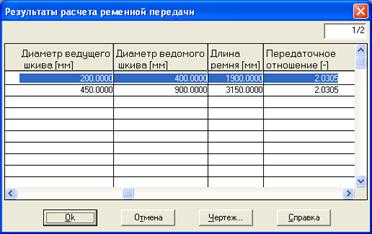
рис. 13 Результаты расчёта ременной передачи
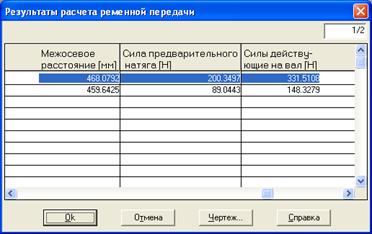
рис. 14 Результаты расчёта ременной передачи
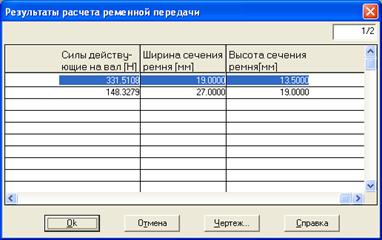
рис. 15 Результаты расчёта ременной передачи
Вывод
Как видно, основные геметрические параметры передачи, расчитанные вручную и автоматизированно практически схожи. Различие лежит в переделах 10%, что доказывает правильность ручного расчёта.
4. Подбор, проверка и эскизная компоновка муфт
Так как в нашем случае муфта соединяет выходной вал редуктора с исполнительным органом, то по рекомендации (стр.472[1]) выбираем сцепную управляемую муфту. Выбор муфты обусловлен тем, что в процессе эксплуатации может понадобиться отключение исполнительного органа от редуктора без остановки электродвигателя. Кроме того, данная муфта предохраняет конструкцию в целом от перегрузок.
Муфта допускает смещение
осей валов: радиальное – от 0,5 до1,2 мм.и угловое - до 1![]()
Диаметр в месте посадки муфты принимаем равным диаметру выходного вала d=55 мм.
Рассчитаем момент муфты между редуктором и исполнительным органом
![]() (4.1)
(4.1)
где N-мощность электродвигателя,
К-коэффициент,
![]() -общий К.П.Д. привода
-общий К.П.Д. привода
n-частота вращения
К=![]() , определяем по таблице
1[5], К=2. Отсюда по формуле (4.1):
, определяем по таблице
1[5], К=2. Отсюда по формуле (4.1): ![]() .
Диаметр вала d=55 мм. Для этих значений по таблице 11.6 [6] принимаем
фрикционную многодисковую механическую муфту МН 5664 – 55. Для d=55 мм число
дисков – 8.
.
Диаметр вала d=55 мм. Для этих значений по таблице 11.6 [6] принимаем
фрикционную многодисковую механическую муфту МН 5664 – 55. Для d=55 мм число
дисков – 8.
На рис. 16 изображен эскиз муфты
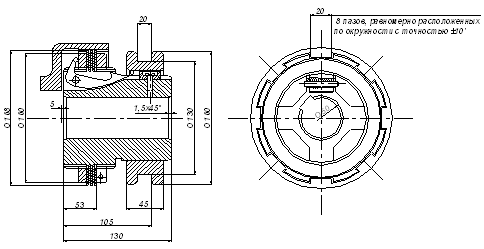
Рис. 16 Эскиз управляемой сцепной фрикционной муфты
5. Расчет и проектирование тяговой звёздочки
Определяем размеры вала и выбираем тип подшипников. В пункте 2.2 рассчитан диаметр тихоходного вала привода d=49,2 мм. По рекомендациям (стр. 223 [1]) на вал звёздочки транспортёра устанавливаем шариковые подшипники радиальные двухрядные сферические. Диаметр под подшипник принимаем d1=50 мм. Предварительно принимаем шарикоподшипники лёгкой серии №1210: d =50мм, D=90мм, В=20мм, которые на валу закрепляются в осевом направлении. По таблице 18.19[1] выбираем корпус узкой серии УМ140.
Крутящий момент на валу
Т=596,7 Н∙м, по условию усилие на транспортёре F=5000 Н, сила действия
звёздочки на вал FЗ=250![]() По условию принимаем расстояние
между опорами 210 мм. По рис. 17 находим реакции опор, для определения
нагружения подшипника:
По условию принимаем расстояние
между опорами 210 мм. По рис. 17 находим реакции опор, для определения
нагружения подшипника:
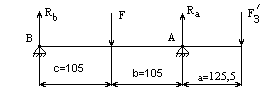
Рис. 17 Схема нагрузки тихоходного вала привода
F+FЗ=Ra+ Rb (5.1)
Ra∙(b+c)-F∙c-FЗ∙(a+b+c) =0 (5.2)
По формуле (5.2) ![]() Н. Тогда по (5.1) Rb=
F-FЗ- Rа=5000-6106,9-12256,5= -13363,4Н
Н. Тогда по (5.1) Rb=
F-FЗ- Rа=5000-6106,9-12256,5= -13363,4Н
Знак ² - ² означает, что реакция Rb направлена в противоположную сторону.
Определим реакции опор:
Для опоры А: ![]()
Для опоры B: ![]()
Левый подшипник (опора В) нагружен больше, поэтому выполняем только его расчет. Определяем эквивалентную нагрузку по формуле:
![]() (5.3)
(5.3)
где Pr-условная постоянная радиальная нагрузка,
X, Y-коэффициенты радиальной и осевой нагрузок,
Fr, Fa-радиальная и осевая нагрузка,
V- коэффициент вращения,
Kб-коэффициент безопасности,
Kt-температурный коэффициент.
Отношение ![]() , находим по таблице
16.5[3] значения коэффициентов радиальной и осевой нагрузок: x=1, y=0. По
рекомендации к формуле 16.29[3] принимаем коэффициент безопасности, учитывающий
характер нагрузки Кб = 1(спокойная нагрузка); температурный
коэффициент Кt =1, V = 1(вращается внутреннее кольцо подшипника).
, находим по таблице
16.5[3] значения коэффициентов радиальной и осевой нагрузок: x=1, y=0. По
рекомендации к формуле 16.29[3] принимаем коэффициент безопасности, учитывающий
характер нагрузки Кб = 1(спокойная нагрузка); температурный
коэффициент Кt =1, V = 1(вращается внутреннее кольцо подшипника).
Тогда по формуле (5.3) ![]()
![]() .
.
По таблице 8.10[3] для II режима нагружения находим коэффициент КHE = 0,25. Находим эквивалентную долговечность по формуле:
![]()
![]() (5.4)
(5.4)
Находим ресурс работы:
![]() (5.5)
(5.5)
где n - частота вращения тихоходного вала привода.
По таблице 16.3[3] находим значение коэффициента надежности а1=1, обобщенный коэффициент совместного влияния качества металла и условий эксплуатации а2=0,8.
Динамическая грузоподъемность:
 (5.6)
(5.6)
Условие С < Сr , т.е 21732,5Н<22900Н выполняется.
Проверяем подшипник по статической грузоподъемности:
x0 = 0,6, y0 = 0,5(т.к. подшипники радиальные); тогда по формуле
![]()
Условие Р0 [С0 соблюдается.
Цепной конвейер не обладает способностью самопредохранения от перегрузки, поэтому он нуждается в предохранительном устройстве. Предохранительное устройство встроено в конструкцию приводной звёздочки. Оно выполнено по нормали. В целях устранения износа и задиров поверхностей скольжения при срабатывании предохранительного устройства в конструкции установлена подшипниковая втулка из антифрикционного чугуна.
Определим основные параметры звёздочки для тяговых пластинчатых цепей. Для заданного шага цепи t=100 мм и числа зубьев z=9, по таблице 7.11[1] определим:
Диаметр ролика D=44мм,
Ширина пластины В=50мм,
Расстояние между внутренними пластинами цепи Ввн=44мм,
Разрушающая нагрузка цепи
![]() =200000 Н,
=200000 Н,
Диаметр делительной
окружности D0=292 мм (рассчитано в пункте 1.1) расстояние между
центрами дуг впадин зубьев: ![]()
Радиус впадин зубьев r =0,5∙D=0,5∙44=22 мм,
Диаметр вспомогательной окружности DR=D0-0,2∙t=292-0,2∙100=272 мм,
Радиус головки зуба: R= t–(e+ r)=100-(21,1+22)=56,9 мм,
Диаметр наружной окружности De=D0+0,25D+10=292+0,25∙44+10=313 мм,
Диаметр окружности впадин Di=D0-D=292-44=248 мм,
Ширина основания зуба b1=0,9∙Bвн=0,9∙44=39,6 мм,
Ширина вершины зуба: b2=0,75∙b1=0,75∙39,6=29,7 мм.
Список используемой литературы
1. Иванов М. Н. и Иванов В.Н. Детали машин. Курсовое проектирование. Учеб. пособие для машиностроит. вузов. М.,²Высш. школа², 1975 – 551с.
2. Савин Л.А., Борисенков В.А., Куликов Р.Н. Кинематический расчёт механических приводов: Методическое пособие к курсовому проектированию по основам конструирования и деталям машин. Орёл ГТУ. Каф. “ТММ”. – Орёл, 1997. – 16с.: ил.
3. Иванов М. Н. Детали машин: Учеб. для студентов высш. техн. учеб. заведений - 5-е изд., перераб.-М.:Высш. шк., 1991. – 383с. ил.
4.Дунаев П.Ф., Леликов О.П. Конструирование узлов и деталей машин:Учеб. пособие для машиностроит. спец. вузов–4-е изд., перераб. и доп.-М.:Высш. шк., 1985 – 416с., ил.
5.Анурьев В.И. Справочник конструктора-машиностроителя. В 3-ёх т. – 5-е изд., перераб. и доп. – М.: Машиностроение, 1978. –559 с., ил.
6. Кузьмин А.В. и др. Расчеты деталей машин: Справочное пособие. – Мн.: Высш. шк., 1986.