
Рефераты по авиации и космонавтике
Рефераты по административному праву
Рефераты по безопасности жизнедеятельности
Рефераты по арбитражному процессу
Рефераты по архитектуре
Рефераты по астрономии
Рефераты по банковскому делу
Рефераты по сексологии
Рефераты по информатике программированию
Рефераты по биологии
Рефераты по экономике
Рефераты по москвоведению
Рефераты по экологии
Краткое содержание произведений
Рефераты по физкультуре и спорту
Топики по английскому языку
Рефераты по математике
Рефераты по музыке
Остальные рефераты
Рефераты по биржевому делу
Рефераты по ботанике и сельскому хозяйству
Рефераты по бухгалтерскому учету и аудиту
Рефераты по валютным отношениям
Рефераты по ветеринарии
Рефераты для военной кафедры
Рефераты по географии
Рефераты по геодезии
Рефераты по геологии
Рефераты по геополитике
Рефераты по государству и праву
Рефераты по гражданскому праву и процессу
Рефераты по кредитованию
Рефераты по естествознанию
Рефераты по истории техники
Рефераты по журналистике
Рефераты по зоологии
Рефераты по инвестициям
Рефераты по информатике
Исторические личности
Рефераты по кибернетике
Рефераты по коммуникации и связи
Рефераты по косметологии
Рефераты по криминалистике
Рефераты по криминологии
Рефераты по науке и технике
Рефераты по кулинарии
Рефераты по культурологии
Рефераты по авиации и космонавтике
Рефераты по административному праву
Рефераты по безопасности жизнедеятельности
Рефераты по арбитражному процессу
Рефераты по архитектуре
Рефераты по астрономии
Рефераты по банковскому делу
Рефераты по сексологии
Рефераты по информатике программированию
Рефераты по биологии
Рефераты по экономике
Рефераты по москвоведению
Рефераты по экологии
Краткое содержание произведений
Рефераты по физкультуре и спорту
Топики по английскому языку
Рефераты по математике
Рефераты по музыке
Остальные рефераты
Рефераты по биржевому делу
Рефераты по ботанике и сельскому хозяйству
Рефераты по бухгалтерскому учету и аудиту
Рефераты по валютным отношениям
Рефераты по ветеринарии
Рефераты для военной кафедры
Рефераты по географии
Рефераты по геодезии
Рефераты по геологии
Рефераты по геополитике
Рефераты по государству и праву
Рефераты по гражданскому праву и процессу
Рефераты по кредитованию
Рефераты по естествознанию
Рефераты по истории техники
Рефераты по журналистике
Рефераты по зоологии
Рефераты по инвестициям
Рефераты по информатике
Исторические личности
Рефераты по кибернетике
Рефераты по коммуникации и связи
Рефераты по косметологии
Рефераты по криминалистике
Рефераты по криминологии
Рефераты по науке и технике
Рефераты по кулинарии
Рефераты по культурологии
Реферат: Дистанционно-пилотируемый летательный аппарат (ДПЛА) "Пчела-1Т"
Реферат: Дистанционно-пилотируемый летательный аппарат (ДПЛА) "Пчела-1Т"
Реферат
Комплекс дивизионной воздушной разведки Строй П с ДПЛА Пчела 1
Москва 2008г.
Содержание
Введение
История создания
Общее описание
Старт ДПЛА
Приземление
Целевая нагрузка
Способ управления
Заключение
Введение
В последние годы создание ДПЛА стало одной из наиболее быстро развивающихся отраслей авиационно-космической промышленности во многих странах мира. 41 страна, в той или иной степени, ведет сейчас разработки подобных машин. В значительной степени это вызвано успешным использованием их в ряде проведенных в последние десятилетия, боевых операций. Несмотря на продолжающиеся сокращения средств на оборону в странах НАТО, программы по модернизации и разработке новых ДПЛА, по оценке западных экспертов, становятся приоритетными, и их финансирование не сокращается, а непрерывно растет. Основные заказчики беспилотных ЛА в странах НАТО в настоящее время при выработке тактико-технических требований к ним опираются на опыт боевого использования штатных ДПЛА, полученный в ходе операции «Союзническая сила»АТО против Югославии в 1999-м.
В будущих войнах и конфликтах XXI века, по оценкам подавляющего большинства западных экспертов, США и страны НАТО будут делать ставку на применение сравнительно дешевых ДПЛА. Слишком уж большой становится цена возможных потерь пилотируемых самолетов и летного состава. Стоимость современного самолета в настоящее время достигает 50-60 млн.долл. Да и на подготовку высококлассного летчика надо потратить еще 10 млн.долл. В то же время, многие задачи, возлагаемые на пилотируемую авиацию, могут с успехом выполняться боевыми ДПЛА. Основными достоинствами беспилотных аппаратов перед летательными аппаратами являются исключение потерь личного состава в ходе боевых действий, что особенно важно при ведении ограниченных войн и в локальных конфликтах, возможность достижения тех же целей при меньших затратах, более низкие демаскирующие признаки, высокая маневренность и большая живучесть. Отмечались повышенная надежность, уменьшенная масса и стоимость аппарата, благодаря снятию многих конструктивных ограничений, связанных с отсутствием летчика. На порядок и более повышается пребывание ДПЛА в разведываемом районе, при этом имеется возможность обнаружения целей с безопасной дальности и высоты пролета над ними. ОКБ имени А.С. Яковлева работает над тактическими ДПЛА с 1980-го и является единственной организацией из нескольких десятков, сумевшей дойти в этом деле до финиша создать аппарат, который завершил госиспытания, освоен в серийном производстве и поставлен на вооружение. Это было обусловлено тем, что ДПЛА «Пчела-1Т» разрабатывался как обычный военный самолет без скидок на размеры. При этом в процессе его разработки лежало полное выполнение требований заказчика, а не достижение уникальных характеристик. Это позволило успешно использовать «Пчелу-1Т» в двух чеченских войнах, причем в условиях, когда применение зарубежных тактических ДПЛА практически исключалось. Комплекс «Строй-П» с ДПЛА «Пчела-1Т» (головной разработчик ГУП НИИ «Кулон»), созданный в 1990-м, предназначен для круглосуточного наблюдения объектов и передачи их телевизионного или тепловизионного изображения в реальном масштабе времени на наземный пункт управления. В 1997-м комплекс, допускающий телевизионную разведку в светлое время суток, принят на вооружение Российской армии. Боевые действия на Северном Кавказе показали, что из существующих беспилотных самолетов, находящихся на вооружении в РФ или на различных этапах разработки, «Пчела» наиболее пригодна к применению в реальных условиях. С помощью «Пчелы» получили уникальную развединформацию, которую невозможно добыть другими способами. Эти сведения, использованные при нанесении артиллерийских ударов и действий подразделений сухопутных войск и морской пехоты, спасли жизнь сотням российских солдат.
История создания
Комплекс дивизионной воздушной разведки Строй П с ДПЛА Пчела 1 (экспортное обозначение – Шмель) начал разрабатываться коллективом во главе с конструктором Н. Чистяковым в 1980е гг. ФГУП «НИИ “Кулон” Минрадиопрома СССР. ОКБ имени А.С. Яковлева Минавиапрома СССР создали тактический беспилотный летательный аппарат Пчела 1, ФГУП «НИИ “Кулон”» – все бортовое и наземное радиоэлектронное оборудование комплекса, Московский телевизионный институт – ТВ-камеру, Азовский оптико-механический завод – ИК-камеру. Все комплектующие узлы, агрегаты, элементы и системы комплекса были созданы в России впервые и из отечественных материалов. Все это потребовало от разработчиков большого труда, энергии и предприимчивости. Тем не менее, за короткий срок удалось создать разведывательный БЛА Пчела 1Т. Первоначально комплекс Строй П замышлялся как средство воздушной разведки и наблюдения поля боя для командира воздушно-десантного полка. Основной задачей, которую должен был решать комплекс Строй П в течение 6–7 суток в ходе воздушно-десантного боя, было наблюдение удаленных танкоопасных направлений (дорог, мостов, дефиле и т.п.) с целью своевременного выявления движения противника на разгром десантировавшейся группировки. Задачи были сформулированы и, сообразно возможностям науки и техники 1980х гг., реализованы ТТХ комплекса Строй П. Пчела стал первым отечественным беспилотным летательным аппаратом многоразового применения, предназначенным для наблюдения за полем боя в тактической глубине. 16 июня 1997 года появилось правительственное постановление № 753, согласно которому Строй П был принят на вооружение. Так как ДПЛА Пчела 1 разрабатывался в интересах ВДВ, то его использование ограничивалось временными рамками одной десантной операции (порядка пяти применений). Для применения непосредственно в зоне активных боевых действий такой подход является вполне оправданным. Даже один боевой вылет ДПЛА Пчелы 1 при своей стоимости около 20 тыс. долл. окупался сохраненными жизнями солдат и важностью добываемой информации. Комплекс Строй П с ДПЛА Пчела 1 предназначен для круглосуточного наблюдения объектов и передачи их телевизионного или тепловизионного изображения в реальном масштабе времени на наземный пункт управления.
Общее описание
Дистанционно-пилотируемый летательный аппарат (ДПЛА) «Пчела-1Т» входит в состав высокомобильного комплекса, обеспечивающего получение в реальном масштабе времени видовой разведывательной информации от телевизионной аппаратуры, установленной на аппарате, при его удалении от наземного пункта дистанционного управления на расстояние до 60 км.
В состав комплекса входят:
· подвижной наземный пункт дистанционного управления с системой пуска и предстартового контроля (НПДУ), размещаемый на одном десантируемом бронетранспортере БТР-Д;
· десять дистанционно-пилотируемых летательных аппаратов "Пчела - 1Т" с расходуемыми средствами (стартовыми ускорителями)
· одна технологическая машина (ТМ) на базе автомобиля "Урал-4320";
· одна транспортно-заряжающая машина (ТЗМ) на базе автомобиля ГАЗ-66.
НПДУ предназначен для транспортировки одного ДПЛА, размещенного в транспортно-десантируемом контейнере, обеспечения предстартового контроля и пуска ДПЛА, формирования команд управления полетом ДПЛА приема, обработки и отображения поступающей местности на телевизионном экране в реальном масштабе времени, записи на видеомагнитофон принимаемой видеоинформации и обеспечения внешней радиосвязи. ДПЛА предназначен для доставки целевой нагрузки в заданный район, обеспечения управления ее работой по командам с НПДУ и передачи информации на НПДУ. Для боевой работы комплекса «Строй-П» необходимы только НПДУ и ДПЛА. НПДУ комплекса собран на шасси десантного бронетранспортёра БТР-Д. Пусковая установка и съёмный транспортно-десантный контейнер (ТДК) с одним ДПЛА «Пчела-1» размещены на этом же шасси. Таким образом, комплекс размещается на единственной подвижной единице. Эта единица способна совершать марш по дорогам всех типов и бездорожью, а также преодолевать вплавь водные преграды и десантироваться парашютным способом с самолётов военно-транспортной авиации. Комплекс Строй П с шестью ДПЛА Пчела 1 размещен на десантном бронетранспортере БТРД или на автомобиле «Урал». Пункт управления смонтирован на базе шасси автомобиля ГАЗ66. Здесь же размещаются 12 ДПЛА в сложенном состоянии в контейнерах размером 2 x 1 x 1 м. В состав комплекса Строй П входят интегрированная станция пуска и управления (на шасси гусеничного десантного бронетранспортера БТРД) и передвижная станция технического обслуживания. Все агрегаты комплекса могут транспортироваться воздушным транспортом (самолетами типа Ан 12, Ан 70 и Ил 76) и десантироваться парашютным способом. После десантирования или приземления комплекса запуск ДПЛА возможен уже через 20 минут. Комплекс полностью обеспечивает техническое обслуживание ДПЛА перед стартом, его пуск и управление, прием и отображение в реальном времени телевизионной информации на дисплее оператора. На видеоконтрольном устройстве отображаются также маршрут аппарата и его текущие координаты.
Старт ДПЛА
Осуществляется с помощью двух твердотопливных ускорителей с короткой направляющей, размещенной на гусеничном шасси боевой машины десанта. Летательный аппарат управляется или по заданной программе, или оператором, которому достаточно ввести в ЭВМ только новые высоту и курс.
В качестве силовой установки на ДПЛА «Пчела-1» применяется двухтактный двухцилиндровый двигатель внутреннего сгорания П-032, вращающий толкающий винт постоянного шага, расположенный в кольцевом оперении. Бортовое оборудование включает сменный комплекс разведывательной аппаратуры, в состав которой входит телевизионная камера или тепловизор. Телевизионная камера имеет объектив с фокусным расстоянием, изменяемым по команде оператора. Оригинальная аэродинамическая схема с кольцевым оперением позволила уменьшить габариты аппарата и исключить его сваливание на малых скоростях полета. Крыло малого удлинения обеспечило необходимые аэродинамические характеристики при минимальных габаритах машины, позволяющих транспортировать ее любыми типами грузового автотранспорта. Посадка на парашюте допускается на неподготовленную ровную площадку. Модульное построение фюзеляжа позволяет быстро заменить поврежденные агрегаты и отдельные элементы конструкции. Применение стеклопластика в конструкции планера обеспечивает малые затраты на серийное производство, простоту технического обслуживания в эксплуатации и малую степень повреждаемости.
Приземление
Посадка на парашюте допускается на неподготовленную ровную площадку. Модульное построение фюзеляжа позволяет быстро заменить поврежденные агрегаты и отдельные элементы конструкции. Применение стеклопластика в конструкции планера обеспечивает малые затраты на серийное производство, простоту технического обслуживания в эксплуатации и малую степень повреждаемости. Оригинальная аэродинамическая схема с кольцевым оперением позволила уменьшить габариты аппарата и исключить его сваливание на малых скоростях полета. Крыло малого удлинения обеспечило необходимые аэродинамические характеристики при минимальных габаритах машины, позволяющих транспортировать ее любыми типами грузового автотранспорта.
Целевая нагрузка
ДПЛА «Пчела-1» может нести в качестве целевой нагрузки телевизионную (ТВ) кадровую камеру с переменным фокусным расстоянием или инфракрасную (ИК) строчную аппаратуру разведки диапазона 8..14 мкм. В обоих случаях в состав целевой нагрузки ДПЛА входит также широкополосный передатчик с антенной для передачи ТВ или ИК изображения.
Особенностью комплекса «Строй-П» является полная автономность его навигационной системы. Для навигации ДПЛА «Пчела-1» используется специально разработанный радиолокатор с активным ответом на основе псевдослучайных широкополосных сигналов. Навигационные параметры – дальность и азимут ДПЛА. Угол места ДПЛА не измеряется, вместо этого используют данные о текущей высоте, измеряемой на борту ДПЛА. Запросная и ответная радиолинии радиолокатора одновременно являются командным и телеметрическим каналами управления ДПЛА. Антенны радиолокатора и широкополосной радиолинии для приёма ТВ (ИК) информации конструктивно объединены. На НПДУ смонтированы два независимых комплекта оборудования радиолокатора. На рисунке 1 виден обтекатель антенн обоих комплектов, имеющий форму высокой кастрюли. Позади обтекателя на броне БТР расположен контейнер с аппаратурой обоих комплектов радиолокатора. В состав специального оборудования ДПЛА входят гиростабилизированная телевизионная камера дневного видения с вариофокальным (с переменным фокусным расстоянием по команде оператора) объективом ПК2. Для использования комплекса в темное время возможна замена телевизионной камеры инфракрасной строчной аппаратурой или трехспектральной строчной системой ведения разведки. Информация передается в реальном времени на телевизионный монитор наземного пункта управления. С этого пункта можно одновременно управлять двумя ДПЛА и получать с них информацию на удалении до 60 км. Компьютерное оборудование наземного пункта дистанционного управления НПДУ позволяет совместить «картинку», поступающую с ДПЛА, с картой, использовать эффект стоп-кадра, делать распечатки изображения местности. Кроме того, вся информация, зафиксированная бортовой аппаратурой, может быть сохранена как видеозапись для последующего детального исследования. Разработано несколько модификаций ДПЛА Пчела: Пчела 1ПМ – постановщик активных радиопомех, Пчела 1ТМ – ДПЛА, оснащенный бортовой обзорной телекамерой с передачей информации в реальном масштабе времени на наземный пункт управления, и т.п. Постановщик помех был реализован в первом поколении комплекса и даже выпускался серийно. В июне 2003 г. были окончены испытания ДПЛА для инфракрасной разведки Пчела 1ИК. Модульная конструкция позволяет легко расширять область применения комплекса путем замены отсека целевой нагрузки. ДПЛА Пчела 1 может применяться в интересах МЧС и для гражданского использования. ДПЛА может осуществлять любые виды патрулирования и поисковых работ. При замене бортовой телевизионной аппаратуры на аппаратуру постановки радиоэлектронных помех аппарат способен подавлять радиостанции противника, работающие в УКВ диапазоне, в радиусе 10–20 км. В варианте воздушной мишени на борту ДПЛА устанавливается комплект специального оборудования, усиливающего заметность в оптическом и радиолокационном диапазонах. «Пчела-1Т» является многоцелевым летательным аппаратом и может быть переоборудована в ДПЛА для постановки помех связным радиостанциям и в воздушную мишень. При замене бортовой телевизионной аппаратуры аппаратурой постановки помех «Пчела-1Т» способна подавлять радиостанции в УКВ - диапазоне в радиусе 10-20 км. В варианте воздушной мишени на ДПЛА вместо телевизионной системы устанавливается оборудование для увеличения заметности аппарата в оптическом и радиолокационном диапазонах, в том числе самолетными ответчиками и трассерами. При этом обеспечивается имитация воздушных целей, типа легких самолетов со скоростями 120-180 км/ч и высотами полета от 100 до 2500 м.
Таблица 1. Основные ТТХ комплекса «Строй-П»
| Характеристика | Значение |
| Назначение комплекса | Телевизионное или инфракрасное наблюдение местности и целей на ней в реальном масштабе времени |
| Состав комплекса |
1) 1) Наземный пункт дистанционного управления, совмещённый с пусковой установкой на шасси десантного бронетранспортёра БТР-Д 2) 2) 10.. 12 дистанционно пилотируемых летательных аппаратов (ДПЛА) «Пчела-1», один ДПЛА транспортируется на НПДУ, остальные – на привлекаемых автомобилях 3) 3) Машина эвакуационно-технологическая на шасси ГАЗ-66 4) 4) Машина технологическая на шасси Урал-4320 |
| Целевая нагрузка (одна из указанных) |
1) 1) Гиростабилизированная кадровая телевизионная камера с 10-кратным вариофокальным объективом, управляемая в пределах ±175 градусов по курсу (азимуту) и +5.. –65 градусов по тангажу (углу места) 2) 2) Строчный инфракрасный сканер диапазона 8..14 мкм с углом захвата 120 градусов В целевую нагрузку входит широкополосный передатчик с антенной |
| Порядок погрешности измерения координат цели (СКО), м | Сотни метров (основной источник погрешности – измерение азимута ДПЛА с НПДУ, СКО 0,5 градуса) |
| Дальность (радиус) действия комплекса, км | 50,0 (при прямой радиовидимости) |
| Характеристика | Значение |
| Продолжительность полёта ДПЛА, час | 2,0 |
| Диапазон высот применения ДПЛА, м | 100..2500 |
| Воздушная скорость полёта ДПЛА, км/час | 140 |
| Стартовая масса ДПЛА, кг, не более | 140 |
| Двигатель ДПЛА | П-032, двухтактный, двухцилиндровый оппозитный, мощностью 32 л.с. |
| Оптическая и акустическая заметность ДПЛА |
· дальность обнаружения невооруженным глазом – 3,0 км · дальность обнаружения по шуму – 3,0 км |
| Способ старта ДПЛА | Катапультный, с использованием двух одноразовых пороховых ускорителей |
| Способ посадки ДПЛА | Парашютно-амортизационный, повторная укладка парашюта требует специального оборудования для сушки и прессовки |
| Кратность применения ДПЛА, раз | 5 |
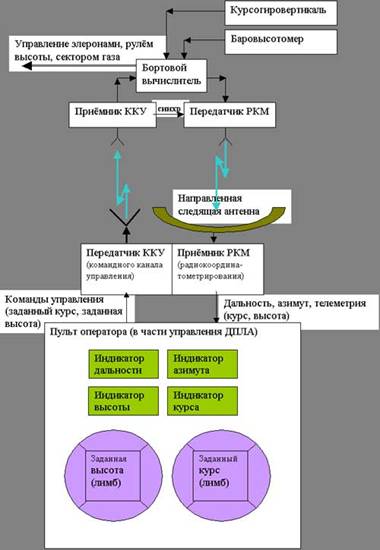
Фото 1. Рис.1. Укрупнённая структурная схема системы управления ДПЛА "Пчела" в комплексе "Строй-П" первого поколения (1982 год)
Способ управления ДПЛА
Начнём с бортового оборудования, существенного для управления. Это следующие приборы:
· бортовой вычислитель, информационный центр ДПЛА
· курсогировертикаль, измеряющая косинус и синус магнитного курса, а также тангаж и крен ДПЛА
· баровысотомер, измеряющий барометрическую высоту полёта ДПЛА
· приёмник ККУ (командного канала управления) и синхронизированный с ним (для возможности измерения дальности) передатчик РКМ (радиокоординатометрирования) с ненаправленными антеннами.
Наземное оборудование:
· направленная следящая антенна с приёмником РКМ для измерения дальности и азимута ДПЛА
· передатчик ККУ (антенна слабонаправленная)
· пульт оператора.
Для простоты из схемы исключено всё оборудование, несущественное для управления ДПЛА, такое, например, как шифраторы, дешифраторы, кодеры и декодеры радиоканалов.
Подробнее о бортовом вычислителе. Это не ЭВМ, а жёсткая аналого-цифровая схема, выполняющая определённые операции с поступающими цифровыми и аналоговыми сигналами. Например, управление высотой полёта бортовой вычислитель производит, управляя сектором газа и рулём высоты. Бортовой вычислитель отклоняет сектор газа от положения номинала (довольно условного) в ту или иную сторону, пропорционально разнице заданной и измеренной баровысотомером высот. Руль высоты отклоняется бортовым вычислителем от нейтрального положения пропорционально измеренному углу тангажа. Элероны отклоняются пропорционально измеренному крену в сторону парирования крена ("Пчела" не управлялась креном в разворотах).
Интересно реализовано поддержание заданного курса. В качестве магнитного компаса применены два магнитных зонда на пермаллое. Зонды размещены на гиростабилизированной горизонтальной площадке внутри курсогировертикали. Один из зондов ориентирован вдоль продольной оси ДПЛА, второй - перпендикулярно к первому в горизонтальной плоскости. Легко видеть, что проекция магнитного поля на первый зонд пропорциональна косинусу, а на второй - синусу магнитного курса ДПЛА. Оператор задаёт курс лимбом на пульте. Датчик поворота лимба тоже синусно-косинусный. Синус и косинус заданного курса передаются по ККУ на борт ДПЛА, где в бортовом вычислителе вырабатывается управление ДПЛА по курсу Ф:
u=sinФизм*cosФзад - cosФизм*sinФзад.
Очевидно, что это управление при малых отклонениях курса ДПЛА от заданного равно
u==sin(Физм-Фзад) ~=Физм-Фзад.
Бортовой вычислитель отклоняет руль направления ДПЛА пропорционально вычисленному управлению u. Алгоритм замечателен тем, что правильно работает при любых отклонениях курса ДПЛА от заданного, кроме теоретически возможного, но неустойчивого состояния, когда ДПЛА летит строго противоположно заданному курсу (теоретически в этом случае вырабатывается нулевое управление). Это свойство алгоритма позволило не реализовывать в бортовом вычислителе логические процедуры анализа курса по четвертям тригонометрического круга.
Как работает боевой расчёт комплекса в части управления ДПЛА? ДПЛА и два пороховых ускорителя устанавливают на каретку пусковой установки (наземный пункт дистанционного управления (НПДУ) комплекса выполнен на шасси десантного бронетранспортёра БТР-Д в виде единой интегрированной станции пуска, управления и разведки). Оператор выполняет рутинные действия по предстартовой подготовке ДПЛА, которая заключается в контроле параметров исправности ДПЛА и в запуске маршевого поршневого двигателя. После удовлетворительного результата предстартовой подготовки оператор нажимает кнопку "Пуск", которая инициирует пороховые ускорители. ДПЛА на каретке под действием реактивной струи разгоняется, в конце разгона каретка с догорающими пороховиками останавливается механическим тормозом, а ДПЛА в соответствии с первым законом Ньютона уходит в полёт.
Первые 15 секунд полёта -- газ максимальный, руль высоты -- неподвижно в стартовом положении, управление осуществляется только по поддержанию нулевого крена ДПЛА. По истечении этого времени ДПЛА принимает текущий курс в качестве заданного и продолжает набор высоты до заданной (обычно 400 метров). На это уходит 2..3 минуты. Оператор после нажатия кнопки "Пуск" никаких действий по управлению ДПЛА не производит.
После набора заданной высоты штурман (второй член боевого расчёта) лимбом на пульте устанавливает заданный курс ДПЛА на цель, которая может быть удалена на расстояние до 50 км. Заданный курс поступает по командному каналу управления в бортовой вычислитель ДПЛА и отрабатывается, как описано выше. Штурман, наблюдая показания индикаторов дальности и азимута, отмечает на карте путь ДПЛА. Через некоторое время (около 5 минут) штурман вычисляет и вносит в заданный курс поправку на ветер и погрешности измерения курса. Как правило, после этого боевой расчёт освобождается от необходимости выполнять какие-либо действия по управлению ДПЛА до приближения ДПЛА к цели. Более того, на расчётное время полёта к цели можно даже выключить радиоканалы, хотя на практике этого никогда не делали.
Как видно из приведённого типового сценария вывода ДПЛА к цели, никакого "непрерыного управления" и "непрерывного информационного контакта" с ДПЛА не требуется. Высочайшая степень автоматизации, достигнутая простейшими техническими средствами.
Настоящая работа начинается для боевого расчёта при приближении ДПЛА к цели. Штурман оценивает накопившуюся погрешность вывода ДПЛА на заданную цель и вносит поправку в заданный курс. Оператор включает ТВ передатчик на борту ДПЛА и начинает наблюдение местности и поиск цели (ТВ оборудование на рис.1 не показано ради упрощения рисунка). Штурман помогает оператору, подсказывая ожидаемые ориентиры, и участвует в обнаружении и распознавании цели (известный "эффект коллективного распознавания"). После обнаружения и распознавания цели оператор наблюдает её элементы, штурман рассчитывает заданный курс повторного захода и при удалении ДПЛА от цели на необходимое для разворота расстояние устанавливает его...
Возврат ДПЛА в точку посадки (вблизи точки старта) аналогичен полёту к цели. Боевой расчёт практически не вовлечён в управление ДПЛА. Полёт завершается выдачей оператором команды "Посадка", по которой на ДПЛА останавливается маршевый двигатель, открывается парашют и надуваются резиновые мешки-амортизаторы.
По своей структуре и техническим решениям система управления этого комплекса напоминает творения немецких инженеров периода краха III Рейха. Это и не мудрено. Советская школа многое почерпнула у поверженного противника, а первый комплекс "Строй-П" был создан по Постановлению ЦК КПСС и Совета Министров СССР всего за полгода после печальных событий в долине Бекаа в качестве нашего ответа израильскому ДПЛАстроению. В те горячие дни работы над комплексом инженеры шутили, что НИИ "Кулон" по напряжённости напоминает рейсканцелярию апреля 1945 года.
Заключение
Для своего времени (Государственные испытания комплекса завершены летом 1990 года) комплекс «Строй-П» был, по-видимому, лучшим в мире среди комплексов аналогичного назначения. Комплекс активно использовался в первую и вторую чеченские кампании и хорошо себя зарекомендовал. На фоне взрывного развития информационных и других технологий комплекс «Строй-П» успел морально устареть, а немногие изготовленные образцы НПДУ и ДПЛА устарели и физически. Однако в идейном плане этот комплекс остаётся эталоном для вновь разрабатываемых комплексов малых тактических ДПЛА. ДПЛА вовсе не предназначены исключительно для военных целей. Ряд работ, возлагаемых в настоящее время на гражданские пилотируемые самолеты и вертолеты, может более экономично, эффективно, в ряде случаев без опасности для экипажа выполняться ДПЛА. Например, борьба с терроризмом, выявление наркотических посевов и криминальных баз в труднодоступных районах, поиск угнанных транспортных средств и нарушителей границы, контроль территорий, разведка и поисково-спасательные работы в труднодоступной местности. Этот перечень можно при желании продолжить, поскольку он охватывает все стороны жизни населения страны. Ведь ДПЛА может использоваться для решения различных задач, связанных как с визуальным контролем наземных объектов с воздуха, так и контроля по различным физическим параметрам с помощью специальных датчиков.
Хочется назвать людей, создавших этот комплекс: директор НИИ "Кулон" А.С. Новосёлов, первый Главный конструктор советских комплексов ДПЛА Олег Ансович Варрэ, его заместители и помощники В.С. Гафанович, Л.А. Волковский, Э.П. Лукашёва, Главный конструктор бортового оборудования В.И. Павлюченко, Главный конструктор курсогировертикали В.К. Крятов, Главный конструктор ДПЛА "Пчела" Ю.И. Янкевич и ведущий конструктор по ДПЛА С.В. Долинский (оба из КБ им. А.С. Яковлева, в то время -- ММЗ "Скорость") и ещё десятки замечательных советских инженеров. Увы, многих из перечисленных уже нет в живых.
Список литературы
1. http://dpla.ru/_MainMenu.htm
2. http://www.market.gona.ru
3. http://www.avia.ru