
Рефераты по авиации и космонавтике
Рефераты по административному праву
Рефераты по безопасности жизнедеятельности
Рефераты по арбитражному процессу
Рефераты по архитектуре
Рефераты по астрономии
Рефераты по банковскому делу
Рефераты по сексологии
Рефераты по информатике программированию
Рефераты по биологии
Рефераты по экономике
Рефераты по москвоведению
Рефераты по экологии
Краткое содержание произведений
Рефераты по физкультуре и спорту
Топики по английскому языку
Рефераты по математике
Рефераты по музыке
Остальные рефераты
Рефераты по биржевому делу
Рефераты по ботанике и сельскому хозяйству
Рефераты по бухгалтерскому учету и аудиту
Рефераты по валютным отношениям
Рефераты по ветеринарии
Рефераты для военной кафедры
Рефераты по географии
Рефераты по геодезии
Рефераты по геологии
Рефераты по геополитике
Рефераты по государству и праву
Рефераты по гражданскому праву и процессу
Рефераты по кредитованию
Рефераты по естествознанию
Рефераты по истории техники
Рефераты по журналистике
Рефераты по зоологии
Рефераты по инвестициям
Рефераты по информатике
Исторические личности
Рефераты по кибернетике
Рефераты по коммуникации и связи
Рефераты по косметологии
Рефераты по криминалистике
Рефераты по криминологии
Рефераты по науке и технике
Рефераты по кулинарии
Рефераты по культурологии
Рефераты по авиации и космонавтике
Рефераты по административному праву
Рефераты по безопасности жизнедеятельности
Рефераты по арбитражному процессу
Рефераты по архитектуре
Рефераты по астрономии
Рефераты по банковскому делу
Рефераты по сексологии
Рефераты по информатике программированию
Рефераты по биологии
Рефераты по экономике
Рефераты по москвоведению
Рефераты по экологии
Краткое содержание произведений
Рефераты по физкультуре и спорту
Топики по английскому языку
Рефераты по математике
Рефераты по музыке
Остальные рефераты
Рефераты по биржевому делу
Рефераты по ботанике и сельскому хозяйству
Рефераты по бухгалтерскому учету и аудиту
Рефераты по валютным отношениям
Рефераты по ветеринарии
Рефераты для военной кафедры
Рефераты по географии
Рефераты по геодезии
Рефераты по геологии
Рефераты по геополитике
Рефераты по государству и праву
Рефераты по гражданскому праву и процессу
Рефераты по кредитованию
Рефераты по естествознанию
Рефераты по истории техники
Рефераты по журналистике
Рефераты по зоологии
Рефераты по инвестициям
Рефераты по информатике
Исторические личности
Рефераты по кибернетике
Рефераты по коммуникации и связи
Рефераты по косметологии
Рефераты по криминалистике
Рефераты по криминологии
Рефераты по науке и технике
Рефераты по кулинарии
Рефераты по культурологии
Дипломная работа: Мікромеханічний акселерометр на рухомому об’єкті
Дипломная работа: Мікромеханічний акселерометр на рухомому об’єкті
Вступ
В двадцятому столітті, коли розвиток техніки має надзвичайно високі темпи, з’явилась велика кількість технічних засобів, які дали поштовх до розвитку нових галузей промисловості, котрі змогли б мініатюризувати та покращити існуючу техніку. На сьогоднішній день можна сказати, що перспективним є розробка приладів, котрі мали б малу масу, не великі габарити, але хороші технічні характеристики, малу собівартість, високу надійність.
Мініатюризація навігаційних систем вимагає створення малогабаритних гіроскопічних датчиків. Пошук нових можливостей створення інерційних датчиків з необхідними характеристиками й прогрес в області мікроелектроніки привели до появи нового класу приладів - мікромеханічних акселерометрів (ММА). Поява мікромеханічних пристроїв, побудованих звикористанням MEMS- технологій (MEMS – Micro Electromechanical Systems) ознаменувала революційні зміни в інерційній технології. В теперешній час питанню створення й використання ММА присвячена все більша увага розробників і споживачів малогабаритних датчиків параметрів руху.
Сучасні ММА значно поступаються по точності традиційним електромеханічним акселерометрам, але вони є кращими за масогабаритними характеристиками, показниками собівартості й енергоспоживання. Розроблені зразки ММА характеризуються надмалою масою (частки грамів) і габаритами (одиниці міліметрів), низькою собівартістю (десятки доларів на одну вісь вимірювання) і енергоспоживанням, високою стійкістю до механічних (ударні впливи до 105 g) і теплових впливів (від - 40°С до +85°С) і достатньою точністю.
Провідне положення в розробці ММА займає Draper Laboratory (США), що досліджує можливість створення мікромеханічних датчиків з початку 80-х років минулого століття. Різні технічні рішення в області розробок мікромеханічних інерційних датчиків отримані й запатентовані рядом закордонних фірм (Rockwell International, Systron Donner, Analog Devices, Sagem, Murata й ін.).
Істотне зниження масогабаритних, вартісних й енергетичних характеристик відкриває нові шляхи використання ММА в цивільній і військовій областях, де раніше їхнє застосування було неможливо через масогабаритні обмеження або стримувалося через економічні міркування. Найбільш привабливим для розробників є потенційний ринок комерційного цивільного використання датчиків, що на порядки перевищує обсяги можливого ринку військової техніки. Серед можливих областей застосування ММА в якості датчиків параметрів руху можна назвати наступні:
1. Автомобільна промисловість. Індустрія автомобільної промисловості є основним «двигуном» швидкого розвитку ринку ММА. У сучасних автомобілях використаються 50-85 датчиків для створення різних систем безпеки й навігації. Прогнозується, що число датчиків протягом найближчих років буде подвоєно і всі останні моделі автомобілів таких, як Cadillac, Mercedes, BMW й Volkswagen будуть забезпечуватися системами навігації й динамічного контролю безпеки.
2. Навігаційне устаткування й військова техніка. Досягнення в області створення безкарданових інерційних навігаційних систем (БІНС) і комплексування із глобальними супутниковими навігаційними системами (GPS і ГЛОНАСС) дозволяють застосовувати ММА для широкого класу завдань навігації й керування рухом. Завдяки своїм унікальним властивостям ММА знаходять застосування в системах озброєнь і військової техніки, можуть бути успішно використані для стабілізації супутникових антен, керування безпілотними літальними апаратами й іншою апаратурою рухомих об'єктів.
3. Робототехніка. Серед можливих застосувань - задачі навігації мобільних роботів, керування маніпуляторами різного призначення, автоматизація заводського устаткування.
4. Медицина. Мікрогіроскопи можуть бути використані для стабілізації мікроінструментів, у медичній електроніці й діагностичній апаратурі.
5. 5 .Товари широкого вжитку. ММА можуть знайти застосування для стабілізації зображення відеокамер, для створення систем індивідуальної навігації, у нових розробках віртуальних комп'ютерних ігор і спортивного спорядження.
Широке застосування ММА та зростання потреби в них стимулюють подальший розвиток данного типу інерційних датчиків. Вдосконалюються їх характеристики, розширюється сфера застосування.
Метою даного проєкту є аналіз теоритичних основ та практичних застосувань сучасних мікромеханічних акселерометрів.
1.Огляд літературних джерел за темою дослідження
Сучасний науково-технічний прогрес в багатьох випадках тісно пов’язаний із застосуванням нових датчиків та приладів. Як вже було зазначено раніше, міромеханічні акселерометри знаходять своє застосування в різноманітних галузях промисловості, особливо в тих, котрі потребують мімізувати габаритні розміри та мінімальні затрати. Наприклад, в автомобілебудуванні вони використовуються в першу чергу для забезпечення безпеки водія та пасажирів. Іноземне слово «акселератор» відомо давно. Зазвичай - це педаль газу, при натисканні якої водій заставляє автомобіль рухатись швидше, тобто з прискоренням. А виміряти прискорення дозволяє такий прилад, як акселерометр. В машинобудуванні цей прилад з’явився зовсім недавно, а в ракетах, підводних човнах, літаках, акселерометри є чутливими елементами систем автоматичного керування рухом [1].
Розглянемо наведені в літературних джерелах основні
характерні особливості акселерометрів. В основі конструкції акселерометра –
грузик (інертна маса), який змінює своє положення в корпусі на пружині (або
іншому пружному елементі), реагуючи на силу інерції, при виникненні прискорення
або різкому зменшенні швидкості руху машини. Чим більше прискорення, тим більше
відхилення грузика. Коли сила інерції врівноважується силою пружини, величина його
зміщення від нейтрального положення свідчить про прискорення, реєструється
будь-яким датчиком переміщення і перетворюється в електричний сигнал на виході
приладу. Цей сигнал потім передається в бортовий комп’ютер [1]. Конструкція
приладу така, що акселерометр реагує на ту складову, яка співпадає з напрямком переміщення
грузика, так званою віссю чутливості. Найпростіші акселерометри мають одну таку
вісь, але є із двома та трьома. Особливостями акселерометра є також те, що він реагує
на силу земного тяжіння. В одному випадку це заважає, а в іншому навпаки
допомагає. Наприклад, якщо автомобіль знаходиться на схилі то акселерометр
вимірює проекцію прискорення сили тяжіння g на свою вісь чутливості –(![]() ), що дозволяє виміряти
нахил авто.
), що дозволяє виміряти
нахил авто.
В роботі [2] наведено опис конструкції та принцип
функціонування акселерометра на рухомому об’єкті. Нехай на автомобілі, який рухається
по рівнинній місцевості, встановлений двоосний акселерометр вимірювальні осі
якого встановлені в горизонтальній площині: X- по осі автомобіля,Y-
перпендикулярно їй, тобто: X – вісь лінійного прискорення, а Y- вісь кутового
прискорення, яке з”явилось внаслідок кручення (повороту). Якщо проінтегрувати вимірюване
прискорення, а також якщо відомо початкове місце знаходження об’єкта і вектор
початкової лінійної швидкості, то можна знайти місце знаходження об’єкта на
даний момент. При русі по горизонталій площині датчик не буде реагувати на прискорення
тяжіння, але при підьомі та на спуску, тобто при продольному та боковому кренах,
виміряне прискорення руху буде додаватися до складових прискорення тяжіння ![]() та
та![]() , де
, де ![]() - відповідні кути нахилу по
осям (X,Y). При цьому датчик буде розрізняти додатні та від’ємні кути нахилу, з
цього випливає, що датчик буде вимірювати тільки крен при відсутності прискореного
руху або взагалі при відсутності руху. Таким чином датчик можна використовувати
в автомобілі для забезпечення зпрацьовування захисних засобів при різкому гальмуванні.
- відповідні кути нахилу по
осям (X,Y). При цьому датчик буде розрізняти додатні та від’ємні кути нахилу, з
цього випливає, що датчик буде вимірювати тільки крен при відсутності прискореного
руху або взагалі при відсутності руху. Таким чином датчик можна використовувати
в автомобілі для забезпечення зпрацьовування захисних засобів при різкому гальмуванні.
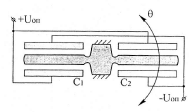
Розглянемо зображену на рис.1 схему чутливого елемента двоосного акселерометра ADXL202 ADXL210 фірми Analog Devices.
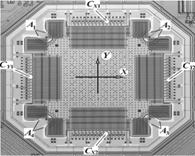
Рис.1. Схема чутливого елемента двоосного акселерометра ADXL202
Його основа складається з прямокутної пластини, яка має масу
![]() і яка встановлена на
полісіліконових ресорних підвісах
і яка встановлена на
полісіліконових ресорних підвісах ![]() -
- ![]() розташованих по кутам
пластини. Підвіс показаний в збільшеному вигляді на рис.2.
розташованих по кутам
пластини. Підвіс показаний в збільшеному вигляді на рис.2.
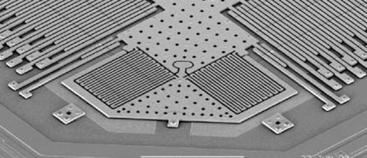
Рис.2. Ресорний підвіс акселерометра ADXL202
Пластина може рухатись у своїй площині під дією сил інерції та тяжіння (по осям X, Y). Величина зміщення визначається прикладеною силою, врівноваженою силою пружності, яка виникає завдяки деформації підвісок та пропорційна цьому зміщенню.
По бокам пластини розміщені дифереціальні конденсатори ![]() ,
, ![]() ,
, ![]() ,
, ![]() , рухомі частини (пальці) котрих
механічно є одним цілим з пластиною. Кожен рухомий палець охоплениний двома нерухомими,
разом вони утворюють диференційний конденсатор, який складається з двох секцій.
При зміщенні рухомої частини ємність одного конденсатора збільшується, а іншого
- зменшується. Розбаланс ємностей зумовлений рухом пластини та використовується
в електричній частині датчика для використання у якості вхідного сигналу. Цей сигнал
пропорційний вимірювальному прискоренню. Конденсаторів є декілька з кожного
боку, вони включені паралельно, в результаті чого чутливий елемент має два
сумарних конденсатора -
, рухомі частини (пальці) котрих
механічно є одним цілим з пластиною. Кожен рухомий палець охоплениний двома нерухомими,
разом вони утворюють диференційний конденсатор, який складається з двох секцій.
При зміщенні рухомої частини ємність одного конденсатора збільшується, а іншого
- зменшується. Розбаланс ємностей зумовлений рухом пластини та використовується
в електричній частині датчика для використання у якості вхідного сигналу. Цей сигнал
пропорційний вимірювальному прискоренню. Конденсаторів є декілька з кожного
боку, вони включені паралельно, в результаті чого чутливий елемент має два
сумарних конденсатора - ![]() та
та ![]() . Розміри елементів
конденсатора такі: довжина активної частини пальців складає 125 мкм, висота 2
мкм, зазор між рухомими та не рухомими пальцями близько 1,3 мкм. Електрична частина
датчика ADXL202 ADXL210 складається з наступних пристроїв:
. Розміри елементів
конденсатора такі: довжина активної частини пальців складає 125 мкм, висота 2
мкм, зазор між рухомими та не рухомими пальцями близько 1,3 мкм. Електрична частина
датчика ADXL202 ADXL210 складається з наступних пристроїв:
- двохтактний високочастотний генератор, вихідна напруга якого
подається в протифазі на нерухомі пальці диференційних конденсаторів(![]() ,
,![]() );
);
- демодулятори ( в кожному каналі X, Y), входи яких підключені
до рухомих пальців ![]() ,
,![]() ; в демодуляторах вихідний
сигнал конденсаторів, величина та фаза якого визначаються з вимірювальним
прискоренням, демодулюється в порівнянні з напругою високочастотного
генератора;
; в демодуляторах вихідний
сигнал конденсаторів, величина та фаза якого визначаються з вимірювальним
прискоренням, демодулюється в порівнянні з напругою високочастотного
генератора;
- RC- фільтри на виході демодуляторів, резистори яких знаходяться в складі мікросхеми, а конденсатори, що забезпечують разом з резисторами фільтрацію вихідного сигналу демудулятора, можуть бути підключені зовні. Тобто, виводи підключення конденсаторів є виводами вихідного аналового сигналу;
- двохканальний перетворювач вихідної аналогової напруги в сигнал
з широтно-імпульсною модуляцією (ШІМ). Вимірювальне прискорення пропорційне ![]() , де
, де ![]() ,
, ![]() - тривалість
імпульсу,
- тривалість
імпульсу, ![]() -
період ШІМ- сигналу. Період може бути встановлений в межах від 0,5 до 10 мс.
-
період ШІМ- сигналу. Період може бути встановлений в межах від 0,5 до 10 мс.
В інших датчиках – мікросхеми ADXL150/190/250 [2] на виході замість ШІМ- перетворювача використовують буферні підсилювачі, які дозволяють також робити підрегулювання нуля та максимального показання шкали вихідної напруги. Ця мікросхема має температурний датчик, який може бути використаний для температурної компенсації вихідної напруги датчика прискорення. Всі датчики мають канал самотестування. Використання спеціалізованих процесорів забезпечує отримання вихідних даних в цифровій формі [2].
Акселерометри застосовуються в різноманітних системах рухомих об’єктів, наприклад системах як керування, так і в системах безпеки руху автомобіля, адже безпека життя людини та комфортність руху на сьогоднішній день є головними задачами в автомобілебудуванні.
На рис.3 показано застосування інерціальних датчиків в автомобільних системах [4].
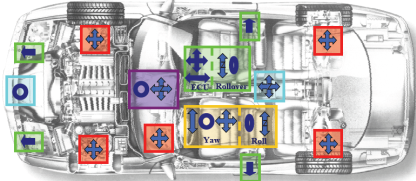
Рис.3. Приклад застосування інерціальних датчиків в автомобілі
Зеленим кольором на рис.3 показано акселерометри, які реагують на зіткнення автомобіля. Для цього використовується датчики типу: ADXL78/193. Для визначення перевороту використовується ADXL203 та ADXL150/300. Жовтим кольором позначено використання акселерометра в динаміці керування рухом для цього також використовуються акселерометри ADXL203 та ADXL150/300.Червоним зображено керування підвіскою машини – це ADXL103/203 ADXL213. Для навігації (фіолетовий) застосовують ADXL150/401 ADXL203.
На рис. 4 зображені датчики системи безпеки, які забезпечують безпеку життя людини та комфорт. До них відносять датчики активації подушок безпеки та ременів безпеки.
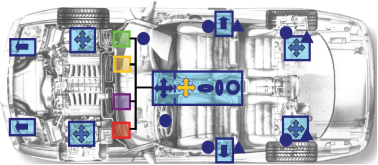
Рис.4. Датчики системи безпеки

-Додаткові датчики
-Двоосні датчики активації подушок
безпеки
-Датчик керування підвісом

- Подушки безпеки
- Датчик ременів безпеки
-Гіроскоп
Таким чином, як видно з наведених даних, сучасні акселерометри мають широке застосування в автомобілебудівній промисловості [3] для забеспечення необхідної безпеки та комфорту руху.
Розглянемо, яким чином відбувається вимірювання прискорень акселерометром, який встановлений в автомобілі.
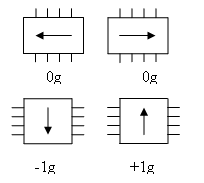
На рис.5 показано дію прискорення земного тяжіння на акселерометр.
|
Акселерометр знаходиться в статичному (нерухомому) стані,
прискорення руху відсутнє, але його показання виникає завдяки силі тяжіння і
залежить від місця розташування відносно Землі. Слід відмітити те, що
відповідно до рис.5 проводиться не тільки вимірювання, а і калібровка
акселерометра. Прискорення земного тяжіння залежить від географічної широти, із
урахуванням впливу обертання Землі, знаходиться в межах від 9,78![]() ( на екваторі) до 9,834
( на екваторі) до 9,834![]() (на полюсах)
при середньому значенні 9,81
(на полюсах)
при середньому значенні 9,81![]() , крім того прискорення залежить
від висоти над рівнем світового океану.
, крім того прискорення залежить
від висоти над рівнем світового океану.
|
Вісь акселерометра, завдяки якій проводиться вимірювання, співпадає
з продольною віссю автомобіля X. Цим же акселерометром проводиться вимірювання
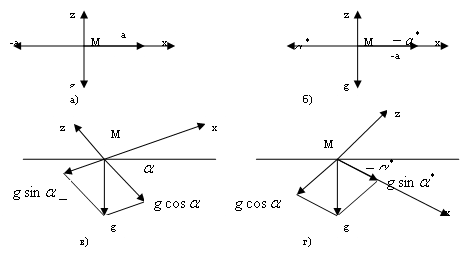
лінійного прискорення автомобіля. На рис. 6,а та рис. 6,б показані вектори
додатного та від”ємного прискорення руху, та відповідні їм вектори прискорення
сил інерції, а також вектори прискорення земного тяжіння, який розташований на
осі Z. На рис. 6,в та рис. 6,г показано спосіб вимірювання продольного крену.
Якщо автомобіль не рухається – показання акселерометра зумовлені тільки
проекцією вектора прискорення земного тяжіння на вісь X: ![]() ,
, ![]() , де
, де ![]() та
та ![]() - додатній та від”ємний
кут нахилу автомобіля. Аналогічним чином по поперечній осі Y може виконуватись
вимірювання кутового прискорення та поперечного крену автомобіля [2].
- додатній та від”ємний
кут нахилу автомобіля. Аналогічним чином по поперечній осі Y може виконуватись
вимірювання кутового прискорення та поперечного крену автомобіля [2].
Таким чином в даному розділі на основі проведеного огляду літературних джерел розглянуті основні особливості акселерометрів, загальний принцип роботи та сфери застосування.
2.Технологічні основи виробництва мікромеханічних приладів
2.1. Вирощування кристалів
 Мікромеханічні прилади виготовляються
з кристалів кремнію. Для виготовлення пластин використовується хімічно чистий кремній,
який добувають із кварцу, іншими словами (з двоокису кремнію) шляхом відновлення
з використанням вуглецю [5]. В ході реакції відновлення кисень двоокису кремнію
зв’язується з вуглецем, таким чином отримуємо окис вуглецю, а кремній виділяється
у вигляді чистої речовини. Далі йде процедура очистки, після чого допустима концентрація
забруднюючих речовин складає 0,1 мільйонної долі відсотку. Для вирішення задачі
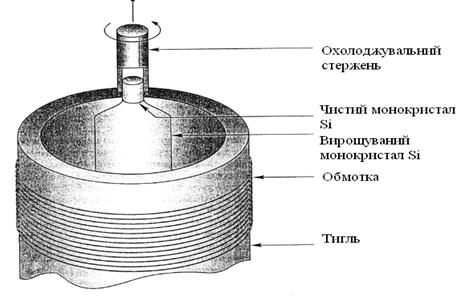
вирощування кристалів як правило застосовують два методи: метод Чохральского та
зонну плавку. В обох випадках беруть невеликий кристал з ідеальною структурою, який
в першому випадку (рис.7) занурюють в розплав кремнію, а потім безперервно
обертаючи повільно витягують разом із налиплим матеріалом.
Мікромеханічні прилади виготовляються
з кристалів кремнію. Для виготовлення пластин використовується хімічно чистий кремній,
який добувають із кварцу, іншими словами (з двоокису кремнію) шляхом відновлення
з використанням вуглецю [5]. В ході реакції відновлення кисень двоокису кремнію
зв’язується з вуглецем, таким чином отримуємо окис вуглецю, а кремній виділяється
у вигляді чистої речовини. Далі йде процедура очистки, після чого допустима концентрація
забруднюючих речовин складає 0,1 мільйонної долі відсотку. Для вирішення задачі
вирощування кристалів як правило застосовують два методи: метод Чохральского та
зонну плавку. В обох випадках беруть невеликий кристал з ідеальною структурою, який
в першому випадку (рис.7) занурюють в розплав кремнію, а потім безперервно
обертаючи повільно витягують разом із налиплим матеріалом.
Рис.7. Метод вирощування кристалів( Метод Чохральского)
В ході наступної дії – охолодження, матеріал котрий налип кристалізується, що і є зародковий кристал. Якщо зародковий кристал буде мати ідеальну структуру, то і кристал, який з нього, виросте також буде мати ідеальну структуру. Згідно методу Чохральского швидкість вилучення кристалу із розплаву лежить в межах від десятих долей міліметра до декількох міліметрів за хвилину.
В методі зонної плавки виконується повільне опускання зони розплаву (рис.8).

Рис.8. Метод вирощування кристалів (Метод зонної плавки )
Кремній, котрий залишився на зоні розплавки застигає у вигляді монокристалу. Розплавлений кремній не розтікається в різні боки, йому заважають сили поверхневого натягу, але до тих пір, поки стержень залишається досить тонким .
Методом Чохральского можна отримати стержні діаметром до 150 мм, а методом зонної плавки - до 100 мм.
Відомо, що використовуються пластини, товщина котрих може бути від 200 до 600 мкм, причому різниця може бути досить велика. При виготовленні інтегральних перетворювачів потрібно використовувати пластини строго заданої товщини. В цьому випадку видалення непотрібного матеріалу можна виконати не тільки механічною обробкою, а і хімічним травленням. Але поверхня при цьому повинна бути полірована, щоб, по-перше, проводити на ній фотолітографію, а по-друге - не погіршувати стану поверхні після травлення, завдяки якому виготовляється сам пружний елемент.
Якщо поверхня кремнієвої пластини отримана після різки злитку з мікронерівностями порядку декількох десятків мікрометрів, то потрібно виконати поліруюче травлення, після чого зніметься 50-70 мікрометрів та поверхня, яка отримається, буде мати мікронерівності декількох мікрометрів. Хоча якість поверхні значно гірша, ніж після механічної обробки, але її також можна використовувати для фотолітографії та мікропрофілювання пластини.
Окислення кремнієвої пластини є хорошим способом, але порівняно із стандартною технологією має деякі обмеження:
1. Якісний окис потрібно мати з обох сторін пластини.
2. Товщина окису повинна витримувати не тільки звичайні випробування (захисні функції при дифузії домішок, паразитними ємкостями провідників).
Існують також захисні поверхні кремнію при глибокому мікропрофілюванні пластини методом анізотропного хімічного травлення. Шар двоокису кремнію формується на підложці за рахунок хімічного з’єднання в напівпровіднику атомів кремнію та кисню, який подається до поверхні кремнієвої підложки, нагрітої в технічній печі до високої температури (900-1200 С) (рис.9).
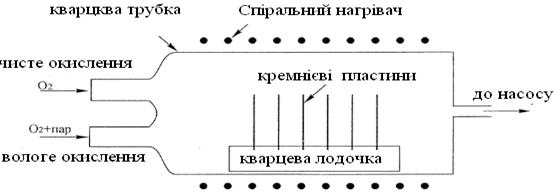
Рис.9.Термічне окиснення.
Пластини розміщуються в кварцовій трубці діаметром 120-130 мм. Окислення відбувається протягом 6-ти годин в залежності від товщини окису.
Окислення проходить набагато швидше в атмосферному середовищі волого кисню, тому вологе окислення використовується для більш товстих захисних шарів.
Найчастіше використовується товщина окису, яка складає десяті долі мікрону, а верхня практична межа по товщині для звичайного термічного окислення складає 1-2 мікрометра. Значним кроком вперед в окисленні захисного шару на сьогодні є добавляння в процес окислення хлористих компонентів. Це призвело до покращення стабільності порогової напруги польових МДП-транзисторів, збільшенню напруження пробою діелектриків [1].
2.2. Розмірна обробка
Чутливі елементи мікромеханічних приладів представляють собою об’єми складної конфігурації з різноманітними наскрізними та глухими щілинами. Розмірна обробка пластин виконується за допомогою травлення, вибір якого залежить від відкриття “вікон” в захисній оксидній плівці. Цей процес називається літографія. Літографічні процеси формують на поверхні підложки шар стійкого до наступних технологічних дій матеріалу, котрий зможе під дією випромінення визначеної хвилі змінювати свої характеристики, і перш за все стійкість [ 5 ].
2.3. Літографія
В залежності від довжини хвилі застосованого випромінення застосовують наступні види літографії: фотолітографію (оптичну), електронно-променеву, рентгенівську та іонно-променеву.
Фотолітографія є основним технологічним процесом в мікроелектронному виробництві.
Для виготовлення масок використовують електронно-променеву літографію. Із-за ефекту розсіювання відбитих електронів в мікроструктурах з високою густиною мінімальна ширина лінії обмежується величиною 0,5 мкм.
Рентгенівська літографія дозволяє зменшити лінійні розміри до декількох десятків нанометрів, при цьому потрібно використовувати складну поглинаючу змазку або спеціальну тонкостінну захисну структуру. Іонно-променева літографія дозволяє проводити локальне легування домішок з дуже високою роздільною здатністю (0,01 мкм).
3.Вимірювання мікропереміщень чутливих елементів приладів
Найбільш розповсюдженими перетворювачами переміщень чутливих елементів мікромеханічних приладів є: тензорезистори та ємнісні датчики.
Розглянемо вимірювання мікропереміщень за допомогою ємнісних датчиків [5].
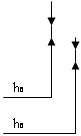
Ємнісний перетворювач працює на основі вимірювання ємності між рухомим електродом 1, який зазвичай розташований на рухомій частині акселерометра (чутливому елементі), та нерухомими електродами 2 які знаходяться на корпусі (рис. 10).
|
|
|

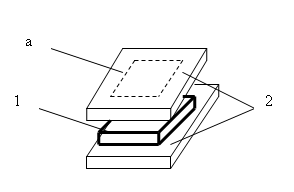
Рис.10 Ємнісний перетворювач переміщень
Ємності між відповідними парами електродів визначаються за формулами:
![]()
![]() ;
; ![]()
![]() ; (1)
; (1)
де - ![]() -
діелектрична проникливість між електродами;
-
діелектрична проникливість між електродами; ![]() (Ф/м);
(Ф/м);
![]() - площа взаємного
перекривання електродів;
- площа взаємного
перекривання електродів; ![]() -
зміщення рухомого електроду;
-
зміщення рухомого електроду; ![]() - початковий
зазор між електродами.
- початковий
зазор між електродами.
Із залежності (1) випливає, що кожний з параметрів приводить до змінення параметрів ємнісного перетворювача. Щоб запобігти впливу площі перекриття площу рухомого електроду роблять меншою, ніж площу нерухомого. Слід мати на увазі, що між кожною парою електродів є силова взаємодія, яка визначається за формулою:
![]() i=1,2 , (2)
i=1,2 , (2)
де ![]() - електричні
заряди на електродах.
- електричні
заряди на електродах.
Також вплив має і параметр ![]() , вплив котрого запобігається в електронній
схемі. Вимірювальна схема з ємнісними перетворювачами переміщень повинна
задовольняти таким умовам [1]:
, вплив котрого запобігається в електронній
схемі. Вимірювальна схема з ємнісними перетворювачами переміщень повинна
задовольняти таким умовам [1]:
1. Лінійність статистичної характеристики у всьому діапазоні вимірювання.
2. Відсутність впливу діелектричної проникливості середовища, яким заповнено простір між вимірювальними електродами перетворювача.
3. Достатня фільтрація вихідного сигналу від несучої частоти генератора, до якого включений ємнісний міст.
4. Виключення впливу тяжіння між рухомими і нерухомими електродами ємнісного моста.
5. Мінімальна кількість схемних елементів.
Найбільш підходящою схемою по вимогам, є схема на рис.11.
![]()
|
|
|
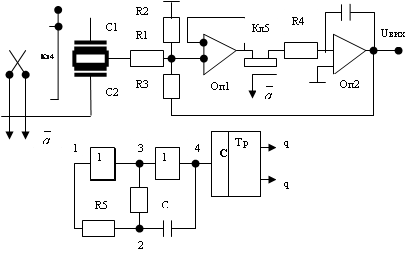
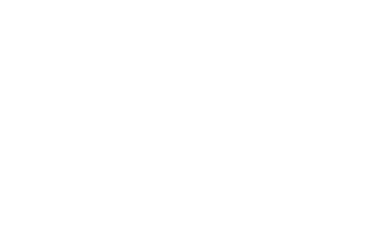
Рис.11. Принципова схема ємнісного перетворювача
Час роботи перетворювача можна розділити на два такти: перший
такт підготовки, під час якого заряджається заряд вимірювальних конденсаторів
від джерела опірних напруг. Ключ синхронного детектора Кл1 замкнений, а
інтегратор виконує функцію аналогового запам’ятовуючого осередку [5]. Другий такт
– вимірювальний, під час якого виконується перезаряд вимірювальних ємностей,
ключ синхронного детектора розімкнений, що призводить до подачі сигналу на вхід
інтегратора та кола зворотнього зв’язку. Два плеча ємнісного моста представляють
диференційні вимірювачі ємності С1, С2, а два інших плеча- джерела опірної
напруги ![]() та
та ![]() .
.
 Вихідний опір вимірювальної діагоналі
ємнісно-резисторного моста є високоомним, а рівень корисного сигналу після моста
недостатній для подальшої обробки [5]. В зв’язку з цим міст доповнений
повторювачем заряду на операційному підсилювачі (Оп1), який одночасно виконує функцію
трансформування високого опору у низький та порівняння сигналів моста та кола зворотного
зв’язку. Резистори суматора зроблені однаково і мають однаковий опір (R1=R2).
Вихідний опір вимірювальної діагоналі
ємнісно-резисторного моста є високоомним, а рівень корисного сигналу після моста
недостатній для подальшої обробки [5]. В зв’язку з цим міст доповнений
повторювачем заряду на операційному підсилювачі (Оп1), який одночасно виконує функцію
трансформування високого опору у низький та порівняння сигналів моста та кола зворотного
зв’язку. Резистори суматора зроблені однаково і мають однаковий опір (R1=R2).
Рис.12. Структурна схема ємнісного перетворювача
Відповідно до структурної схеми (рис.12) повна передатна функція перетворювача має вигляд:
![]() (3)
(3)
де ![]() - статистичний
коефіцієнт передачі перетворювача;
- статистичний
коефіцієнт передачі перетворювача; ![]() - стала
часу інтегратора; s –оператор Лапласа.
- стала
часу інтегратора; s –оператор Лапласа.
Інтегратор виконує дві функції. По-перше - він придає порядок астатизму перетворювачу, в результаті чого температурний дрейф електронних вузлів прямого кола охоплений зворотнім зв’язком, не впливає на точність перетворення. По-друге в підготовчому такті разом із ключем синхронного детектора він виконує функцію аналогового запам’ятовуючого осередку результату перетворення на попередньому такті. При s=0 з виразу (3) одержуємо, що напруга на виході вимірювальної схеми дорівнює:
![]() . (4)
. (4)
З формули (4) випливає, що основними причинами температурної похибки вимірювального кола є нестабільність джерела опорної напруги та нестабільність зазору між електродами.
Температурну похибку можна визначити за формулою:
![]() (5)
(5)
де ![]() - температурний
коефіцієнт напруги стабілізатора;
- температурний
коефіцієнт напруги стабілізатора; ![]() -
температурний коефіцієнт матеріалу який впливає на змінення зазору.
-
температурний коефіцієнт матеріалу який впливає на змінення зазору.
Температурний коефіцієнт напруги стабілізатора приблизно на порядок перевищує величину інших похибок. В якості одного з способів підвищення точності ємнісного перетворювача є вибір стабілізатора, знак температурного коефіцієнта напруги якого не співпадає зі знаком температурного коефіцієнта змінення початкового зазору.
Для діапазону температур (-60 …+80) ![]() сумарна відносна
похибка складає
сумарна відносна
похибка складає ![]() % від діапазону вимірювання.
% від діапазону вимірювання.
4.Структура та принцип функціонування мікро механічних акселерометрів
4.1. Загальні принципи побудови
|
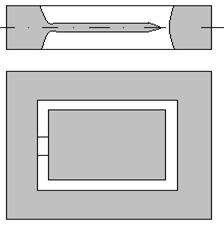
Рис. 13 Принципова схема балочного акселерометра
|
![]()
![]()
![]()
![]() `
`
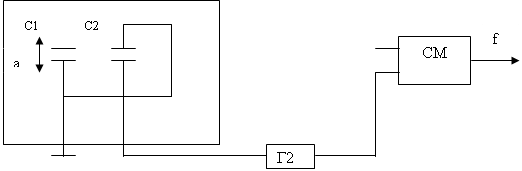
Рис.14 Блок-схема розімкнутого акселерометра з частотним виходом
Номінальний зазор складає 0,039 мм. Маятники складають дві ємності С1 і С2 з електродами, встановленими на корпусі приладу. Обкладки ємностей включені таким чином, що при дії прискорення зазор в одному конденсаторі збільшується а в другому зменшується.
Кожна ємність включена до складу контура генераторів Г1 та Г2. Частота одного генератора зменшується а другого збільшується. Сигнали від кожного генератора складаються за допомогою змішувача ЗМ, а різницева частота цих сигналів і є вихідним сигналом акселерометра. Така схема акселерометра дозволяє виключити додаткові деталі на маятниках і значно спростити конструкцію чутливого елементу.
За вимірюванням різницевих частот двох генераторів можна визначити прискорення. На рис.15 приведена залежність вихідного сигналу акселерометра від величини діючого прискорення.
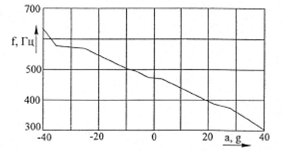
Рис.15. Залежність вихідного сигналу від діючого прискорення
При розробці даного типу акселерометра довелось зіткнутися з цілим рядом проблем: явищем самосинхронізації частот двох генераторів, досить значною залежністю вихідного сигналу акселерометра від величини напруги живлення та температури навколишнього середовища. Для компенсації всіх цих похибок розробниками вводилось алгоритмічна компенсація всіх похибок.
По схемі балочного акселерометра випускаються прилади типу АТ1101 та АТ1105.
|
![]()
|
||||||||||||
|
||||||||||||
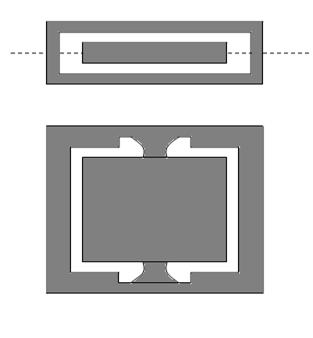
Рис.16. Гібридний акселерометр компенсаційного типу (схема підвісу)
Маятником може слугувати як внутрішня, так і зовнішня пластина. Акселерометр має гібридну конструкцію – датчик моменту контуру зворотнього зв’язку виконаний по традиційній технології і має нерухомий постійний магніт та обмотку на маятнику. На маятнику напилені електроди, які є загальною обкладкою ємнісного датчика переміщень маятника, а два інших електрода напилені на корпусі приладу. Зазор між маятником та електродами на корпусі складає 0,021 мм. Для збільшення маятниковості встановлений груз.
Акселерометр має встрояну електроніку зворотнього зв’язку, виконану на основі гібридно-плівчатої технології. Акселерометри були виготовлені для застосування в керуючих боєприпасах з діапазоном вимірювання від 100g до 100000g а також для комерційних цілей з діапазоном вимірювання прискорень (0,1-1,5)g.
Блок-схема акселерометра наведена на рис.17. Блок-схема складається з задаючого генератора ЗГ, двох підсилювачів У1 та У2, двох випрямлювачів В1 та В2, диференційного підсилювача ДУ, датчика моменту ДМ, та еталонного опору Rе з якого знімається вихідний сигнал.
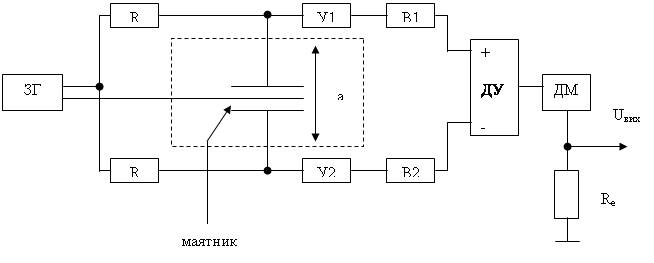
Рис.17. Блок-схема акселерометра
Даний тип акселерометра випускається в декількох модифікаціях (А-12, А-15, А-16), в залежності від конкретного застосування. Ці акселерометри встановлюються в карданні та безкарданні системи.
Основним недоліком описаного приладу є складність конструкції чутливого елементу.
Акселерометр з встрояною електронікою витримує удари до 50g та має наступні характеристики:
- діапазон вимірювальних прискорень ![]() ;
;
- масштабний коефіцієнт ![]() ;
;
- нестабільність масштабного коефіцієнта ![]() ;
;
- дрейф нульового сигналу на протязі однієї години ![]() ;
;
- дрейф нульового сигналу за час більше однієї години ![]() ;
;
- поріг чутливості ![]() ;
;
- маса акселерометра ![]() ;
;
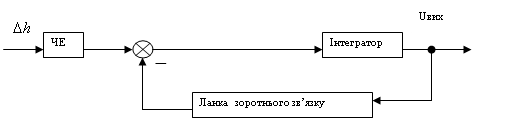
Є також варіант конструкції акселерометра прямого вимірювання з підвісом маятника по схемі рис.16, показаний на рис.18 [5].
|
|
||||||||||||||||
 |
|||||||||||||||||
 |
|||||||||||||||||
|
|||||||||||||||||
|
|||||||||||||||||
|
||||||
|
||||||
|
|||||
Рис.18. Маятник акселерометра: а) схема підвісу; б) підключення електродів датчика переміщення для лінійного акселерометра; в) підключення електродів для кутового акселерометра; 1- нерухома пластина; 2- пружний підвіс; 3- рухомий елемент підвісу (маятник).
Рухома пластина 3 являється маятником, який за допомогою чотирьох пружних перемичок підвісу 2 з’єднаний з базовою пластиною 1. Вся маятникова система може бути виконана з монокристалічного кремнію анізотропним травленням. Торцеві поверхні бази 1 можуть бути з’єднані зі скляними боросілікатними кришками, наприклад, електростатичною зваркою. Рухома пластина є одночасно центральним електродом ємнісного датчика переміщень.
4.2. Структура та принцип дії акселерометра фірми Analog Devices типу ADXL
Фірма Analog Devices випускає серію одноосних
двоосних акселерометрів ADXL для діапазону вимірювання прискорень від ![]() до
до ![]() . Частотний діапазон акселерометра
(0-100) кГц.
. Частотний діапазон акселерометра
(0-100) кГц.
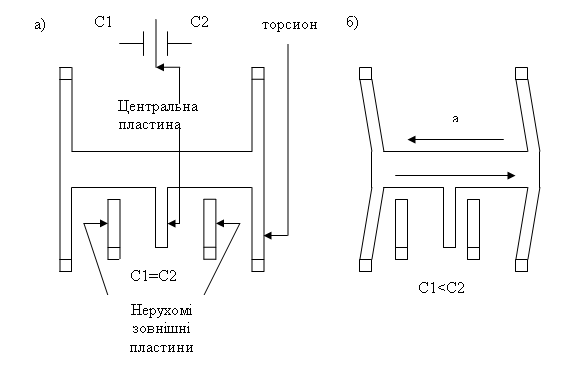 Схема кремнієвого чутливого елементу показана на
рис.19,а, а його конфігурація при дії прискорення на рис.19,б [5]
Схема кремнієвого чутливого елементу показана на
рис.19,а, а його конфігурація при дії прискорення на рис.19,б [5]
Рис.19. Конфігурація чутливого елемента акселерометра: а) спокій; б) при дії прискорення.
На нерухомі частини конденсатора чутливого елементу подаються протифазні прямокутні імпульси 1 МГц: амплітуди обох прямокутних імпульсів дорівнюють один одному, але зсунуті по фазі на 180. В спокої ємність двох конденсаторів рівна, тому вихідна напруга на їх електричному центрі (н центральній пластині прикріпленій до середньої балки) дорівнює 0.
Коли балка починає рухатись, то різниця ємностей приводить до появи вихідного сигналу на центральній пластині. Амплітуда сигналу буде збільшуватись із збільшенням прискорення, прикладеного до чутливого елементу.
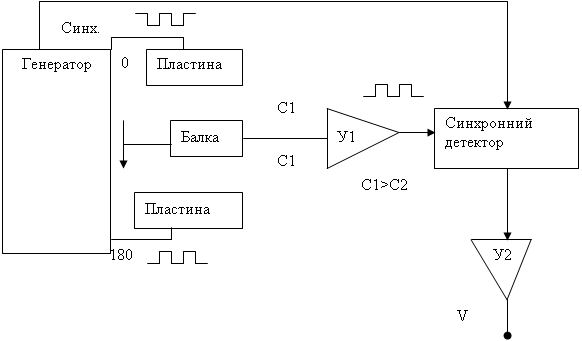
Принцип вимірювання прискорення ілюстрований блок-схемою на рис.20.
 |
|||||
|
|||||
Рис.20. Блок-схема акселерометра
Центральна пластина через підсилювач У1 підключена до синхронного детектора. Напрям руху балки впливає на фазу сигналу тому синхронне детектування використовується для виділення інформації про амплітуду. Вихід синхронного детектора через підсилювач У2 забезпечує вихідну напругу прискорення V.
Акселерометри цієї серії можуть найти застосування: при вимірюванні кутів нахилу в автомобільних сигнальних пристроях; при реакції на інерційні сили для захисту дисків в ноутбуках, в чутливих елементах подушок безпеки, в системах навігації автомобіля, в системах контролю ліфту, при наявності вібрації та ударів в системах керування станками та контролю вібростендів.
Розглянемо акселерометр останнього покоління – це трьоосний акселерометр фірми Analog Devices типу ADXL.
Акселерометр ADXL330 виготовляється в мініатюрному пластмасовому корпусі типу LFCSP_LQ розміром : 4*4*1.5 мм.
Розглянемо наведену на рис.21 функціональну блок-схему акселерометра ADXL330.
Блок сенсорів мікросхеми включає в себе три чутливих елементи, кожний з яких орієнтований в напрямку однієї з ортогональних осей: x, y, z . Розташування осей відносно корпусу мікросхеми показано на рис. 22. Технологічна похибка орієнтації осей сенсорів відносно просторових осей при виготовлені та установці не перевищує 0.1 градус. Наявність технологічної похибки приводить до виникнення систематичної між осевої похибки вимірювання, яка може бути повністю скомпенсована на системному рівні
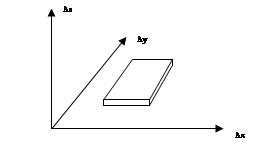
Рис. 22 Орієнтація осей відносно корпуса акселерометра
Канал формування вихідного сигналу відповідного прискорення вздовж відповідної осі складається з ємнісного сенсора, допоміжного підсилювача, демодулятора сигналу сенсора, кінцевого підсилювача і зустрічного ортогонального резистора Rfiltr з опором 32 кОм, який одночасно є елементом вихідного фільтру нижніх частот. В таблиці 1 наведені дані щодо призначення виводів мікросхеми.
Призначення виводу мікросхеми ADXL330 Таблиця 1
| Номер виводу | Призначення |
| 1,4,9,11,13,16 | Вільний (NC) |
| 2 | Само тестування (ST) |
| 3,5,6,7 | Загальний (COM) |
| 8 | Вихід каналу Z(Zout) |
| 10 | Вихід каналу Y(Yout) |
| 12 | Вихід каналу X(Xout) |
| 14,15 | Напруга живлення Vs |
Блок сенсорів прискорення мікросхеми, що містить ADXL330, представляє собою електромеханічний вузол, включаючий в себе рухому і статичну частину. Рухома частина – це мініатюрна спеціально оброблена деталь, на поверхні якої сформовані рухомі обкладки трьох диференційних конденсаторів. Рухома частина за допомогою виготовлених з полікремневих пружинок підвішена над поверхнею підложки мікросхеми, на якій сформовані статичні елементи блоку сенсорів. Застосування єдиного вузла для створення трьох датчиків прискорення дозволяє досягнути високої ортогональності взаємного розташування датчиків і, як наслідок - малого рівня міжосьових перешкод.
Пружинки системи підвісу рухомого вузла забезпечують гальванічний контакт з рухомими обкладками диференційних конденсаторів. Під дією сил інерції або земного тяжіння рухома частинам електромеханічного вузла може відхилятись у будь-якому напрямку в заданих межах. На поверхні підложки напроти обкладки кожного з диференційних конденсаторів, розташованих на рухомому вузлі, знаходяться нерухомі обкладки. Сигнал на виході кожного диференційного конденсатора залежить від величини зміщення рухомої частини конденсатора, зумовленого відхиленням рухомої частини електромеханічного вузла від нейтрального положення відносно відповідних частин на підложці. Принцип формування сигналу на виході диференційного конденсатора проілюстровано на рис. 23. Для вимірювання прискорення за допомогою ємнісного сенсора, побудованого із застосуванням диференційного конденсатора, в акселерометрах серії ADXL компанії Analog Devices використовується два частотних протифазних вимірювача сигналу U1 і U2. Сигнали представляють собою коливання типу «меандр», які формуються внутрішнім генератором вимірювальних сигналів.
Диференційний конденсатор складається з пластини П1, яка знаходиться на рухомому вузлі, і пластин П2 і П3, розташованих на підложці. Як видно з рис.23, нерухома обкладка цього конденсатора виготовлена у вигляді двох пластин, що мають однакову форму і розміри поверхні.
|
|
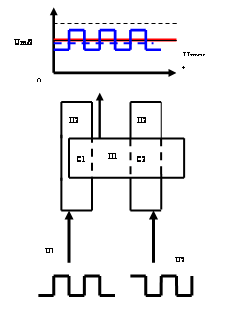
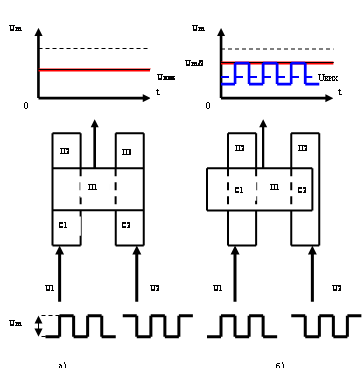
Рис .23 . Формування сигналів на виході диференційного конденсатора при нейтральному положенні рухомої обкладки а) зміщення рухомої обкладки вліво, б) зміщення рухомої обкладки вправо; в) еквівалентна схема сенсора з використанням диференційного конденсатора.
Всі елементи диференційного конденсатора виготовлені з полікремнія і є хорошими провідниками в діапазоні робочих температур. На кожній з пластин диференційного конденсатора є контакт для підводу вимірювального сигналу. При відсутності зовнішнього механічного збудження (рис. 23,а) рухома частина диференційного конденсатора П1 знаходиться в середньому положенні, парціальні ємності С1 і С2, утворені кожною пластиною нерухомої обкладки (П2,П3) і рухомою обкладкою конденсатора (П1), будуть рівні між собою [1].
Еквівалентна схема сенсора з використанням диференційного конденсатора представлена на рис. 23,г. Як видно з представленої схеми, ємності С1 та С2 утворюють ємнісний дільник напруги, до середньої точки якого підключений вхід допоміжного підсилювача з вхідним опором. Коефіцієнт передачі ємнісного дільника kn в цьому випадку дорівнює 0.5. Сигнал Umax, що знімається з рухомої частини П1, представляє собою постійну напругу Um/2 (синя лінія на рис. 23,а) оскільки в першому напівперіоді вимірювального сигналу до дільника прикладені напруги U1=0 та U2=Um, а в другому напівперіоді - навпаки U1=Um та U2=0. При зміщенні сигнальної пластини П1 вліво за рахунок дії сили інерції (рис. 23,б) С1>С2, коефіцієнт ділення kn для сигналу U1 більше за 0.5, а для сигналу U2 менше, ніж 0.5, що призводить до формування на пластині П1 напруги Uвих, яка містить постійну складову, рівну Um/2, і змінну складову, по формі співпадаючу з вимірювальним сигналом U1. Амплітуда змінної складової залежить від відношення ємностей С1 і С2.
Демодуляція сигналу з виходу допоміжного підсилювача здійснюється шляхом синхронного детектування, для чого в блок демодулятора в якості опорного подається один з вимірювальних сигналів, (рис. 21). Сигнал на виході блоку демодуляторів при використанні напруги U1 в якості опорного сигналу показаний на рис. 23 червоною лінією.
В таблиці 2 для порівняння приведені параметри декількох акселерометрів.
Параметри акселерометрів ADXL330 ADXL202/ADXL210Таблиця 2
| Параметри | умови | ADXL330 | ADXL202 | ADXL210 |
|
||
| Первічний датчик |
|
||||||
| Діапазонви мірюваних прискорень g | По всі осям по всьому діапазоні | 3.6 | 2 |
|
|||
| Не лінійність % | 0.3 | 0.2 | 0.2 |
|
|||
| Похибка встановлення, градус |
|
|
|
|
|||
| Міжосьова похибка % |
|
|
|
|
|||
| Чутливість |
|
||||||
| Скважність %/g | 250c Xfilt,Yfilt | - | 12.5 | 4 |
|
||
| Аналоговий вихід, мВ/g | 300 | 312 | 100 |
|
|||
| Температурний дрейф, %/0c |
|
|
|
|
|||
| Шум: |
|
||||||
|
Спектральна щільність шуму 10-9g/ |
X,Y |
|
|
500 | 500 |
|
|
| Z | 350 | - | - |
|
|||
| Частотні характеристик |
|
||||||
| Діапазон частот, кГц | X,Y | Без зовнішнього фільтру | 1.6 | 5 (аналогов.) | 5 (аналогов.) |
|
|
| Z | 0.5 | - | - |
|
|||
| Резонансна частота датчика, кГц | 5.5 | 10 | 14 |
|
|||
| Рівень початкового зміщення вихідного сигналу |
|
||||||
| Параметри | умови | ADXL330 | ADXL202 | ADXL210 | |||
| Скважність % |
|
- | 50 | 50 | |||
| Вихідна напруга, В | 1.5 | - | - | ||||
| Температурний дрейф 10-3g/0c | 1 | 2 | 2 | ||||
| Фільтр | |||||||
| Технологічний розкид величини внур. опору R, кОм |
|
|
|
|
|||
| Мінімальна ємність фільтру пФ | 4700 | 1000 | 1000 | ||||
| Режим само тестування | |||||||
| зміна скважність % |
|
- | +10 | +10 | |||
| Вхідна напруга «0» В | +0.6 | ||||||
| Вхідна напруга «1» В | +2.4 | ||||||
| Вихідна напруга Xout, мВ | -150 | ||||||
| Вихідна напруга Yout, мВ | +150 | ||||||
| Вихідна напруга Zout, мВ | -60 | ||||||
| Джерело живлення | |||||||
| Діапазон робочих напруг, В | 2.0-3.6 | 3.0-5.25 | 2.7-5.25 | ||||
| Діапазон струмів, мкА | 320 | 600 | 600 | ||||
| Час включення, мс |
|
1 |
160 |
160 |
|||
| Діапазон робочих температур | -25…70 | 0…70 | 0…70 | ||||
Для обмеження смуги частот вихідного аналового сигналу до кожного виходу датчика необхідно підключити конденсатор, який разом з внутрішнім резистором є фільтром низьких частот (ФНЧ). Ємність конденсатора Cfit можна визначити з відношення для частоти зрізу ФНЧ:
![]() (6)
(6)
де ![]()
![]() -
частота зрізу ФНЧ на рівні -3ДБ, Гц
-
частота зрізу ФНЧ на рівні -3ДБ, Гц
4.3.Характеристики акселерометру ADXL330
При розробці систем керування з об’єктами, які використовують
акселерометри серії ADXL, слід врахувати, що
звуження смуги частот вихідного сигналу дозволяє збільшити точність вимірювання
завдяки зменшенню впливу
внутрішніх шумів вимірювальної системи. В системах вимірювання прискорення
прийнято використовувати одиниці, які є похідними від прискорення вільного падіння
![]() .
.
Середнє квадратичне значення рівня шуму на виході мікросхеми ADXL330 визначається відношенням:
![]() (7)
(7)
де n – спектральна щільність шуму, виражена в міліонних долях
прискорення вільного падіння ![]() ; BW- ширина
смуги частот вихідного сигналу на рівні 3дБ; k- технологічний параметр, який
для ADXL330 є рівним 1.6.
; BW- ширина
смуги частот вихідного сигналу на рівні 3дБ; k- технологічний параметр, який
для ADXL330 є рівним 1.6.
Середнє квадратичне і квазіпікове значення рівня шуму на виході вимірювання прискорень із застосуванням акселерометра ADXL330, розраховані для різних значень ширини смуги частот вихідного сигналу відповідно за виразами (6) і (7), приведені в таблиці 3.
Таблиця 3
Рівень шуму на виході системи вимірювання прискорень ADXL330
| Смуга частот вихідного сигналу Гц | |||||||
| 1 | 10 | 50 | 100 | 200 | 500 | ||
| Ємність конденсатора фільтру мкФ | 4.7 | 0.47 | 0.10 | 0.05 | 0.027 | 0.01 | |
|
Середнє квадратичне значення шуму, |
x, y | 0.35 | 1.12 | 2.50 | 3.54 | 5.01 | 7.92 |
| z | 0.44 | 1.4 | 3.13 | 4.43 | 6.25 | 9.90 | |
|
Квазіпікове значення шуму (x,y) |
1.40 | 4.48 | 10.00 | 14.16 | 20.04 | 31.68 | |
Спектральна щільність шуму для вимірювальних каналів x і y
мікросхеми ADXL330 однакова і складає (при напрузі живлення
3В) ![]() а для каналу z -
а для каналу z -![]() [1].
[1].
Квазіпікове значення шуму з вірогідністю 95% не перевищує 4N. При збільшенні напруги живлення рівень вихідного сигналу збільшується пропорційно цій зміні, а відносно рівня шуму зменшується, таким чином він залежить від температури нагріву електронних компонентів і залишається практично незмінним.
Значення вихідних сигналів ADXL330 в статичному режимі в залежності від орієнтації мікросхеми показано на рис. 24.
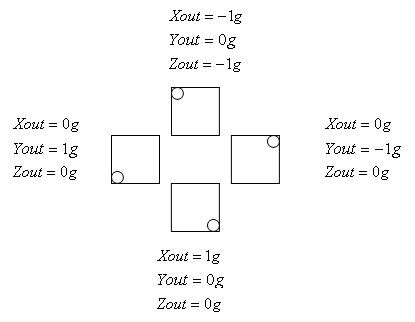
|
 |
Рис.24. Сигнали на виході схеми ADXL330 в статичному режимі в залежності від орієнтації датчика відносно напряму сили тяжіння Землі
4.4. Особливості монтажу
При монтажі мікросхеми акселерометра ADXL330 необхідно дотримуватись обережності в зв’язку з мініатюрними розмірами корпусу. Для монтажу цього акселерометра розроблена спеціальна технологія пайки із застосуванням припою з великим вмістом свинцю, або пайки чистим свинцем. Весь цикл пайки здійснюється за 8 хвилин із заданою швидкістю підігріву і закінчуючи охолодженням, а також з фіксованою довжиною періоду максимального нагріву з обмеженням температури в 260 градусів. Технологія пайки наведена в технічному описі мікросхеми [1].
Всі виводи мікросхеми повинні бути припаяні до плати для забезпечення великої жорсткості конструкції і точності вимірювання.
Всі виводи напруги живлення і виводи загальної шини повинні бути з’єднані між собою зовнішніми проводами. Для розв’язки по колу живлення поблизу виводу мікросхеми між загальною шиною та шиною живлення необхідно поставити конденсатор ємністю 0.1 мкФ. При наявності на платі інших схем, які можуть утворювати шуми, рекомендується в коло живлення акселерометра додатково включати резистор з опором 100 Ом або дросель з ємністю фільтру по колу живлення до 1 мкФ.
Калібровку і повірку акселерометра ADXL330 здійснюють за допомогою входу ST (рис 21, табл. 1). В режимі
тестування на вхід ST необхідно подати напругу живлення ![]() . Подача цієї напруги приводить
до появи між підложкою і рухомим вузлом електростатичної сили, яка зміщує рухому
частину електромеханічного вузла блоку сенсорів по трьом просторовим осям. В результаті
сигнал на виході кожного каналу буде змінений наступним чином. При напрузі живлення
3В сигнал на виході каналу Х змінюється на (-150 мВ), що еквівалентно
прискоренню
. Подача цієї напруги приводить
до появи між підложкою і рухомим вузлом електростатичної сили, яка зміщує рухому
частину електромеханічного вузла блоку сенсорів по трьом просторовим осям. В результаті
сигнал на виході кожного каналу буде змінений наступним чином. При напрузі живлення
3В сигнал на виході каналу Х змінюється на (-150 мВ), що еквівалентно
прискоренню
(-0.5 g). Сигнал на виході каналу У зміниться на (+150 мВ), що еквівалентно прискоренню (-0.5 g). а на виході каналу (Z – 60 мВ), що еквівалентно прискоренню (-0.2 g).
В робочому режимі вихід ST може залишатись вільним або бути підключеним до загальної шини. Необхідно, щоб напруга на цьому виході не перевищувала (Vs +0.3).Для гарантованого обмеження напруги на виході ST акселерометра доцільно підключати діод у прямому підключенні з малим падінням напруги на pn –переході між виводом ST і шиною живлення Vs.
Висновки
В ході виконання курсової роботи були розглянуті питання про застосування мікромеханічних акселерометрів на рухомому об’єкті, автомобілі. Представлені кінематичні схеми, блок схеми акселерометрів різних видів, схеми чутливих елементів, ресорних підвісів, розглянуто принцип дії акселерометрів, приведені таблиці з технічними характеристиками, графіки вихідних сигналів. Представлені рисунки із схемами застосування та розташування акселерометрів на автомобілі з чітким поясненням відповідності роботи та завдання кожного з них.
Мікромеханічні прилади по своїй природі є мініатюрними приладами, тому представлені матеріали, що дають змогу зрозуміти, технологію виробництва акселерометрів, зокрема технологію та методи вирощування кристалів.
Найбільш важливим є вимірювання мікропереміщень, тому розглянуто методи вимірювання згідно яким зроблено висновок, щодо кращих методів вимірювання мікропереміщень чутливих елементів мікромеханічних приладів, один з яких є вимірювання за допомогою ємнісного перетворювача.
5. Організаційно-економічний розділ
Вступ
В двадцять першому столітті мікромеханіка знайшла застосування в дуже багатьох галузях промисловості і народного господарства. Але найчастіше своє застосування вона знаходить у приладах навігації.
Прилади навігації – це прилади до яких відносять належну увагу, адже найголовнішим в приладах навігації є точність вимірювання, чутливість, діапазон вимірювання.
На сьогодні на ринку споживаннямікромеханічних приладів приладів існує досить жорстока конкуренція і від того, як твій прилад буде виміряти вимірювальний параметр , який показник рівня технічної якості, кількість часу, який буде витрачено на розробку, суми, яку даний прилад буде коштувати, буде залежати попит на виготовлення даного приладу.
В даному економіко-технологічному розділі представлена оцінка рівня якості, спланований графік НДДКР та розраховано кошторис НДДКР. [6]
5.1. Оцінка рівня якості виробу
5.1.1. Вихідні положення
Оцінка рівня якості приладу проводиться з метою порівняльного аналізу і визначення найефективнішого в технічному відношенні варіанта інженерного рішення. Така оцінка проводиться на стадіях створення нової і модернізації діючої техніки, при впровадженні її в виробництво, у процесі проведення функціонально-вартісного аналізу тощо.
На різних етапах оцінка рівня якості виробу має свої особливості.
На стадії створення нових або модернізації діючих виробів
(при проведенні функціонально-вартісного аналізу) коли за варіантами, що
підлягають розгляду, недостатньо інформації щодо кількісної характеристики
властивостей виробу, узагальнюючий показник рівня якості - коефіцієнт
технічного рівня (![]() ) розраховується для кожного варіанту інженерного
рішення за формулою:
) розраховується для кожного варіанту інженерного
рішення за формулою:
![]() ; (8)
; (8)
де ![]() -коефіцієнт
вагомості і-го параметра якості в сукупності прийнятих для розгляду
параметрів якості;
-коефіцієнт
вагомості і-го параметра якості в сукупності прийнятих для розгляду
параметрів якості;
![]() - оцінка і-го параметра якості j-го варіанта виробу в
балах;
- оцінка і-го параметра якості j-го варіанта виробу в
балах;
![]() - кількість параметрів виробу,
які прийняті для оцінки.
- кількість параметрів виробу,
які прийняті для оцінки.
Кращим варіантом інженерного рішення виробу з прийнятих до розгляду є варіант, якому відповідає найбільше значення коефіцієнта технічного рівня
![]() (9)
(9)
де ![]() - кількість варіантів інженерних
рішень, які були прийняті для
- кількість варіантів інженерних
рішень, які були прийняті для
порівняльної оцінки.
При наявності кількісної характеристики властивостей виробу коефіцієнт технічного рівня можна визначити за формулою:
![]() (10)
(10)
де ![]() - відносний
(одиничний) і-й показник якості j-ого варіанта виробу.
- відносний
(одиничний) і-й показник якості j-ого варіанта виробу.
Далі наведемо порядок розрахунку ![]() та
та![]() .
.
5.1.2. Обґрунтування системи параметрів виробу і визначення відносних показників якості
На основі даних про зміст основних функцій, які повинен реалізовувати виріб, вимоги замовника до них, а також умов, які характеризують експлуатацію виробу, визначають основні параметри виробу (приладу, засобів обчислювальної техніки, програмного продукту), які будуть використані для розрахунку коефіцієнта технічного рівня виробу. Система параметрів, що прийнята до розрахунків, повинна достатньо повно характеризувати споживчі властивості виробу (його призначення, надійність, економне використання ресурсів, стандартизація тощо). Чим більше параметрів прийнято для оцінки рівня якості, тим точніша буде оцінка. У будь-якому випадку кількість параметрів повинна бути не менше шести. Основні параметри виробу повинні бути достатньо охарактеризовані.
Для оцінки рівня якості виробу візьмемо такі параметри:
Кількість осей – характеризує можливість вимірювання;
Робочий діапазон– ширина значень вимірюваної величини, які може зафіксувати прилад;
Чутливість – характеризує здатність приладу вимірювати
Напруга живлення;
Робочий температурний діапазон – характеризує здатність приладу вимірювати у несприятливих умовах;
Споживчий струм – характеризує енергоємність приладу;
Викладення методики оцінки рівня якості проводиться для виробу, який має багатоаналогів,візьмемо за базовий прилад акселерометр ADXL203 [2] основні технічні параметри виробів наведені в таблиці 4.
Таблиця 4
Основні технічні параметри виробу
| Марка акселерометра |
Кільк. осей |
Робочий діапазон g |
Чутливість |
Напруга живлення В |
Споживаний струм мА |
Робочий температурний діапазон |
| ADXL203 | 2 |
|
|
5(3…6) | 0.7 |
|
| ADXL330 | 3 |
|
|
2.0…..3.6 | 0.32 | -25…+70 |
Відносні (одиничні) показники якості за будь-яким
параметром ![]() , якщо вони находяться у лінійній
залежності від якості, визначаються за формулами:
, якщо вони находяться у лінійній
залежності від якості, визначаються за формулами:
 (11)
(11)
Або
 (12)
(12)
де ![]() ,
, ![]() - числові значення і-го
параметру відповідно нового і базового виробів.
- числові значення і-го
параметру відповідно нового і базового виробів.
При нелінійній залежності між параметрами і якістю виробу, або якщо параметри відрізняються більш ніж на порядок, слід використовувати наступні формули:
 (13)
(13)
або
 (14)
(14)
чи інші залежності, що відповідають специфіці параметру.
Слід пам’ятати, що якщо зі зміною значення параметру нового виробу відносно базового якість виробу погіршується, то відносний показник якості повинен бути менше 1, якщо поліпшується – більше одиниці, якщо не змінюється – дорівнювати 1. Наприклад, збільшення величини параметра веде до покращення якості виробу (продуктивність виробу, економність тощо) і зі збільшенням кількісного значення величини параметра якість виробу погіршується (маса, габарити, споживана потужність тощо).
Таблиця 5
Відносні показники якості.
| Параметри |
Одиниця виміру параметра |
Вироби | |
| Базовий ADXL203 | ADXL330 | ||
| Кільк. осей | 1 | 1.5 | |
| Робочий Діапазон | g | 1 | 2.11 |
|
Чутливість |
|
1 | 0.3 |
|
Споживаний струм |
мА | 1 | 0.47 |
|
Робочий температурний діапазон |
|
1 | 0.6 |
| Живлення | В | 1 | 0.5 |
5.1.3. Визначення коефіцієнтів вагомості параметрів
Вагомість кожного параметра в загальній кількості параметрів, що розглядаються при оцінці визначається методом попарного порівняння. Оцінку проводить експертна комісія, кількість членів якої повинна дорівнювати непарному числу (не менше 5 чол.). Експерти повинні бути фахівцями в даній предметній галузі.
Визначення коефіцієнтів вагомості передбачає: визначення ступеня
важливості параметрів шляхом присвоєння їм відповідних рангів, перевірку
придатності експертних оцінок для подальшого використання, виявлення і оцінку
попарного пріоритету параметрів, обробку результатів і визначення коефіцієнтів
вагомості (![]() ).
).
Після детального обговорення та аналізу кожний експерт оцінює ступінь важливості параметрів шляхом присвоєння їм рангів. Причому 1 присвоюється найважливішому (найвагомішому) параметру, а n – менш вагомому параметру з обраних для оцінки. Значення оцінок, виставлених одним експертом не можуть повторюватися, окрім випадків, коли експерт вагається і не може виділити найважливіший параметр. Тоді, наприклад, він виставляє оцінку для обох параметрів 1..2.
Припустимо, що результати експертного ранжування мають наступний вигляд (подано в Табл. 6):
Таблиця 6
Результати ранжування параметрів
|
Назва параметра |
Ранг параметра за оцінкою експерта |
Сума рангів Ri ,R |
Відхилення,
|
|
||||
| 1 | 2 | 3 | 4 | 5 | ||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| Кільк. осей | 1 | 1 | 2 | 3 | 1 | 8 | -9,5 | 90,25 |
| Робочий Діапазон | 2 | 3 | 3 | 1 | 2 | 11 | -6,5 | 42,25 |
|
Чутливість |
3 | 2 | 1 | 2 | 3 | 11 | -6,5 | 42,25 |
|
Споживаний струм |
4 | 5 | 5 | 5 | 4 | 23 | 5,5 | 30,25 |
|
Робочий температурний діапазон |
6 | 4 | 4 | 4 | 5 | 23 | 5,5 | 30,25 |
| Живлення | 5 | 6 | 6 | 6 | 6 | 29 | 11,5 | 132,25 |
| 21 | 21 | 21 | 21 | 21 | 105 | 0 | 367,25 | |
Перед подальшою обробкою перевіряється сума рангів по кожному стовпцю (2-6), яка має дорівнювати:
![]()
 (15)
(15)
lе n — кількість оцінюваних параметрів.
Для випадку 6-ти параметрів, сума рангів по кожному стовпцю (2-6) дорівнює:

Визначення можливості використання результатів ранжування параметрів для подальших розрахунків проводять на підставі розрахунку коефіцієнта конкордації (узгодженості) експертних оцінок. Для цього:
а) визначають суму рангів кожного параметра (по рядках) за формулою (16)
 (16)
(16)
де ![]() — ранг і-го
параметра, визначений l-м експертом;
— ранг і-го
параметра, визначений l-м експертом;
N — число експертів.
б) проводять перевірку загальної суми рангів за формулою (17), яка повинна дорівнювати
 (17)
(17)
Для випадку 6-ти параметрів та 5-ти експертів, загальна сума рангів дорівнює
![]()
в) обчислюють середню суму рангів ( Т ) за формулою (18):
 (18)
(18)
Для випадку 6-ти параметрів та 5-ти експертів, середня сума рангів дорівнює
![]() .
.
г) визначають відхилення суми рангів кожного параметру (Rі ) від середньої суми рангів ( Т ) (Табл. 1.3, стовпець 8) за формулою (19):
![]() (19)
(19)
Сума відхилень за всіма параметрами повинна дорівнювати нулю.
г) обчислюють квадрат відхилень за кожним параметром (![]() ) та загальну суму квадратів відхилень (Табл. 1.3, стовпець 9) за
формулою (20)
) та загальну суму квадратів відхилень (Табл. 1.3, стовпець 9) за
формулою (20)
 (20)
(20)
д) визначають коефіцієнт узгодженості (конкордації) за формулою (21):
 (21)
(21)
Коефіцієнт узгодженості може мати значення в інтервалі ![]() . У разі повної
узгодженості поглядів експертів коефіцієнт W=1. Чим більше розбіжностей між поглядами
експертів, тим меншою буде величина W. Визначена розрахункова величина W
порівнюється з нормативною WH. Якщо
. У разі повної
узгодженості поглядів експертів коефіцієнт W=1. Чим більше розбіжностей між поглядами
експертів, тим меншою буде величина W. Визначена розрахункова величина W
порівнюється з нормативною WH. Якщо ![]() ,
визначені дані заслуговують на довіру і придатні до використання. Для засобів
обчислювальної техніки (зважаючи на відмінність показників для різних
споживачів) необхідно регламентувати більш вільні межі вірогідності експертних
оцінок. Для засобів обчислювальної техніки (і відповідно програмного продукту)
беруть WH=0,67, для електровимірювальних і радіотехнічних виробів WH=0,77.
,
визначені дані заслуговують на довіру і придатні до використання. Для засобів
обчислювальної техніки (зважаючи на відмінність показників для різних
споживачів) необхідно регламентувати більш вільні межі вірогідності експертних
оцінок. Для засобів обчислювальної техніки (і відповідно програмного продукту)
беруть WH=0,67, для електровимірювальних і радіотехнічних виробів WH=0,77.
Якщо розрахункове значення коефіцієнта W<WH, необхідно провести повторне ранжування. Для цього треба повторити експертизу, залучивши більшу кількість експертів, провести більш глибоке обговорення й аналіз важливості параметрів.
Використовуючи отримані від кожного експерта результати ранжування параметрів (див. Табл. 6), проводиться попарне порівняння всіх параметрів (результати заносяться в Табл.7). При проведенні попарного порівняння параметрів слід пам’ятати, що порівнюються не числові значення виставлених експертами оцінок, а ранги (або місце цих оцінок). Таким чином, якщо, наприклад, перший експерт дав оцінку важливості параметру П1 x1=2, а параметру П2 x2=1, то при парному порівнянні параметрів, в Табл. 7 заноситься знак ”>”, бо 2 > 1.
Припустимо, що результати попарного порівняння параметрів мають наступний вигляд:
Таблиця 7
Попарне порівняння параметрів
| Параметри | Експерти | Підсумкова оцінка |
Числове значення коефіцієнтів переваги |
||||
| 1 | 2 | 3 | 4 | 5 | |||
| x1 i x2 | > | > | > | < | > | > | 1,5 |
| x1 i x3 | > | > | < | < | > | > | 1,5 |
| x1 i x4 | > | > | > | > | > | > | 1,5 |
| x1 i x5 | > | > | > | > | > | > | 1,5 |
| x1 i x6 | > | > | > | > | > | > | 1,5 |
| x2 i x3 | > | < | < | > | > | > | 1,5 |
| x2 i x4 | > | > | > | > | > | > | 1,5 |
| x2 i x5 | > | > | > | > | > | > | 1,5 |
| x2 i x6 | > | > | > | > | > | > | 1,5 |
| x3 i x4 | > | > | > | > | > | > | 1,5 |
| x3 i x5 | > | > | > | > | > | > | 1,5 |
| x3 i x6 | > | > | > | > | > | > | 1,5 |
| x4 i x5 | > | < | < | < | > | < | 0,5 |
| x4 i x6 | > | > | > | > | > | > | 1,5 |
| x5 i x6 | < | > | > | > | > | > | 1,5 |
Широко використовуються наступні значення коефіцієнтів переваги
![]()
де ![]() і
і ![]() — параметри, які порівнюються між собою.
— параметри, які порівнюються між собою.
На основі числових даних ![]() табл.
1.4 складають квадратну матрицю
табл.
1.4 складають квадратну матрицю ![]() (див.
Табл. 5.5).
(див.
Табл. 5.5).
Таблиця 8
Розрахунок вагомості параметрів
| xi | Параметри xj | Перша ітерація | Друга ітерація | |||||||
| x1 | x2 | x3 | x4 | x5 | x6 | b’i | j’ i | b’’i | j’’i | |
| x1 | 1.0 | 1,5 | 1,5 | 1,5 | 1,5 | 1,5 | 8,5 | 0,173 | 69,75 | 0,1724 |
| x2 | 1,5 | 1.0 | 1,5 | 1,5 | 1,5 | 1,5 | 8,5 | 0,173 | 69,75 | 0,1724 |
| x3 | 1,5 | 1,5 | 1.0 | 1,5 | 1,5 | 1,5 | 8,5 | 0,173 | 69,75 | 0,1724 |
| x4 | 1,5 | 1,5 | 1,5 | 1,0 | 0,5 | 1,5 | 7,5 | 0,154 | 62,75 | 0,1552 |
| x5 | 1,5 | 1,5 | 1,5 | 0,5 | 1.0 | 1,5 | 7,5 | 0,154 | 62,75 | 0,1552 |
| x6 | 1,5 | 1,5 | 1,5 | 1,5 | 1.5 | 1.0 | 8,5 | 0,173 | 69,75 | 0,1724 |
| Всього | 49 | 1 | 404,5 | 1 | ||||||
Розрахунок вагомості (пріоритетності) кожного параметра i (![]() ) проводиться для першої
ітерації за формулами (22) та (23):
) проводиться для першої
ітерації за формулами (22) та (23):
 (22)
(22)
 (23)
(23)
де ![]() — вагомість і-го параметра за результатами
оцінок всіх експертів - визначається як сума значень коефіцієнтів переваги (
— вагомість і-го параметра за результатами
оцінок всіх експертів - визначається як сума значень коефіцієнтів переваги (![]() ) даних усіма експертами по і-му
параметру. Результати розрахунків заносяться в
Табл. 5.5. Оцінки вагомості параметрів і (
) даних усіма експертами по і-му
параметру. Результати розрахунків заносяться в
Табл. 5.5. Оцінки вагомості параметрів і (![]() ) розраховують декілька раз, доки наступне значення буде
відхилятися від попереднього менш ніж 5 %. Слід пам’ятати, що для
будь-якої ітерації
) розраховують декілька раз, доки наступне значення буде
відхилятися від попереднього менш ніж 5 %. Слід пам’ятати, що для
будь-якої ітерації ![]() .
.
На другій і наступних ітераціях значення коефіцієнта
вагомості (![]() )
розраховується за формулами (24),
(25) та (26):
)
розраховується за формулами (24),
(25) та (26):
 (24)
(24)
де v – номер відповідної ітерації (ступінь не брати), а ![]() визначається як
визначається як
 (25)
(25)
чи
![]() . (26)
. (26)
Відносна оцінка, яка отримана на останній ітерації
розрахунків, приймається за коефіцієнт вагомості (![]() )
і-го параметру. За абсолютним значенням (
)
і-го параметру. За абсолютним значенням (![]() )
судять про вагомість (пріоритетність) певного параметра виробу
)
судять про вагомість (пріоритетність) певного параметра виробу
Таблиця 9
Розрахунок технічного рівня виробу
| Параметри |
Одиниця виміру параметра |
Вироби | |
| Базовий ADXL203 | ADXL330 | ||
| Кількість осей | 0,1724 | 0,2586 | |
| Робочий Діапазон | g | 0,1724 | 0,3638 |
| Чутливість |
|
0,1724 | 0.05172 |
|
Споживаний струм |
мА | 0,1552 | 0.072944 |
|
Робочий температурний діапазон |
|
0,1552 | 0.09312 |
| Живлення | В | 0,1724 | 0.0862 |
| КТ.Р. | 1 | 0,9264 | |
В Табл. 9 розраховано КТ.Р. для визначених виробів.
5.2. Планування виконання науково-дослідних та дослідно-конструкторських робіт
Проводиться на основі:
виявлення та опису всіх робіт і подій, закріплення за кожною роботою виконавців;
визначення тривалості та трудомісткості виконання робіт;
побудови сітьового графіка;
визначення основних параметрів подій (ранній і пізній строки здійснення подій, резерви часу подій) і робіт (ранні і пізні початок і закінчення, повні та вільні резерви робіт);
аналізу і оптимізації сітьового графіка.
Сітьовий графік представляє собою графічну модель процесу виконання комплексу робіт. Сукупність робіт і подій подається у табл. 10, 11. При цьому робіт повинно бути не менше тридцяти п’яти, подій - не менше двадцяти п’яти.
Таблиця 10
Зміст робіт
| Шифр робіт | Зміст робіт |
| 1-2 | Отримання технічного завдання |
| 2-3 | Підбір кадрів |
| 3-4 | Організація початку роботи |
| 3-6 | Розробка правил та розгляду під час проведення НДДКР |
| 4-5 | Пошук інформації про об’єкт встановлення |
| 4-7 | Пошук інформації по існуючим аналогам |
| 5-6 | Замовлення обладнання |
| 5-7 | Підготовка робочих приміщень до монтажу обладнання |
| 6-7 | Інструктаж робочих з питань правил, розпорядку та техніки безпеки під час проведення НДДКР |
| 7-8 | Узагальнення здійсненої інформації |
| 8-11 | Монтаж обладнання |
| 8-9 | Розробка методології |
| 9-10 | Узгодження з замовником технічного завдання |
| 10-11 | Первинна розгляд датчиків |
| 11-12 | Аналіз технічних характеристик датчиків |
| 12-14 | Лабораторне тестування датчиків та вибір оптимальних параметрів для вирішення задач вимірювання |
| 12-13 | Оптимальний вибір датчика |
| 13-14 | Тестування датчика |
| 14-15 | Обробка результатів тестування |
| 15-16 | Вдосконалення схеми вимірювання |
| 16-17 | Розробка технічної документації |
| 16-22 | Випробування датчика в несприятливих умовах |
| 17-19 | Калібрування датчика |
| 20-21 | Тестування приладу в несприятливих умовах |
| 21-22 | Повірка датчика |
| 22-23 | Остаточне тестування |
| 23-24 | Остаточне написання конструкторської документації |
| 25-26 | Узагальнення всієї інформації, Здача приладу і документації |
Таблиця 11
Перелік подій
| № події | Формулювання події |
| 1 | Початок роботи |
| 2 | Технічне завдання отримано |
| 3 | Кадри підібрано |
| 4 | Робота почалась |
| 5 | Інформація про об’єкт контролю знайдена |
| 6 | Розробка правил та замовлення обладнання виконані |
| 7 | Інформація про існуючі методи знайдена |
| 8 | Зібрана інформація узагальнена |
| 9 | Методологія розроблена |
| 10 | Технічне завдання узгоджено |
| 11 | Обладнання закуплено |
| 12 | Монтаж датчика на лабораторну установку |
| 13 | Датчик вибрано |
| 14 | Тестування датчика закінчено |
| 15 | Обробка результатів експерименту завершена |
| 16 | Перетворювач вдосконалено |
| 17 | Визначення параметрів технічного завдання |
| 18 | Параметри вибрані |
| 19 | Калібрування приладів завершена |
| 20 | Перший тестовий датчик є в наявності |
| 21 | Тестування в несприятливих умовах завершено |
| 22 | Прилад повірений |
| 23 | Остаточні тестування пройдені |
| 24 | Вся інформація узагальнена |
| 25 | Перевірка та здача конструкторської документації |
| 26 | Прилад зданий замовнику |
Визначення тривалості виконання робіт проводиться за формулами (27) та (28):
за наявності інформації про мінімальний, максимальний та найбільш ймовірний час виконання роботи –
![]() (27)
(27)
за наявності інформації про мінімальний та максимальний час виконання роботи –
![]() (28)
(28)
де ![]() - мінімальний час виконання
роботи;
- мінімальний час виконання
роботи;
![]() - максимальний час виконання
роботи;
- максимальний час виконання
роботи;
![]() - найбільш ймовірний час виконання
роботи.
- найбільш ймовірний час виконання
роботи.
Таблиця 12
| Шифр роботи |
дні |
дні |
|
Виконавці | Трудомісткість, людино-дні | |
| Посада | Кількість, осіб | |||||
| 1-2 | 1 | 2 | 1 | Керівник проекту | 1 | 1 |
| 2-3 | 2 | 4 | 3 | Керівник проекту | 1 | 3 |
| 3-4 | 1 | 2 | 1 | Керівник проекту | 1 | 1 |
| 3-6 | 1 | 2 | 1 | Асистент | 1 | 1 |
| 4-5 | 3 | 6 | 4 | Асистент | 1 | 4 |
| 4-7 | 4 | 5 | 4 | Головний інженер | 1 | 4 |
| 5-6 | 1 | 5 | 3 |
Робочій 1 Робочий 2 |
1 | 3 |
| 5-7 | 3 | 7 | 5 |
Робочій 1 Робочий 2 |
2 | 10 |
| 6-7 | 1 | 2 | 1 | Асистент | 1 | 1 |
| 7-8 | 2 | 3 | 2 |
Головний інженер, Керівник проекту, Асистент |
3 | 6 |
| 8-11 | 9 | 12 | 10 |
Робочій 1, Робочий 2 |
2 | 20 |
| 8-9 | 5 | 7 | 6 | Головний інженер | 1 | 6 |
| 9-10 | 1 | 3 | 2 | Керівник проекту | 1 | 2 |
| 10-11 | 6 | 8 | 7 | Керівник проекту | 1 | 14 |
| 11-12 | 2 | 3 | 2 |
Головний інженер, Асистент |
2 | 4 |
| 12-14 | 12 | 20 | 15 | Асистент | 1 | 15 |
| 12-13 | 3 | 5 | 4 | Робочій | 1 | 4 |
| 13-14 | 10 | 15 | 12 | Головний інженер | 1 | 12 |
| 14-15 | 2 | 3 | 2 |
Головний інженер, Асистент |
2 | 4 |
| 15-16 | 5 | 6 | 5 |
Головний інженер, Асистент |
2 | 10 |
| 16-17 | 1 | 2 | 1 | Асистент | 1 | 1 |
| 16-22 | 4 | 10 | 6 | Керівник проекту | 1 | 6 |
| 17-19 | 2 | 4 | 3 | Головний інженер | 1 | 3 |
| 20-21 | 4 | 5 | 4 | Асистент | 1 | 4 |
| 21-22 | 15 | 18 | 16 | Робочій 1 | 1 | 16 |
| 22-23 | 16 | 20 | 18 | Робочій 2 | 1 | 18 |
| 23-24 | 2 | 5 | 3 | Головний інженер | 1 | 3 |
| 25-26 | 8 | 10 | 9 | Керівник проекту | 1 | 9 |
Розрахунки рекомендується представити в Табл. 11. У випадку отримання нецілих значень тривалості виконання робіт, їх округляти потрібно в сторону більшого числового значення. Тривалість і трудомісткість робіт. Трудомісткість роботи визначається за формулою (29):
![]() , (29)
, (29)
де Р – кількість виконавців даної роботи.
Визначення основних параметрів подій (ранніх і пізніх строків здійснення подій, резервів часу подій) виконують за допомогою формул (30)...(33).
|
|
|
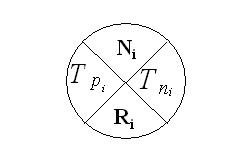
Ранні та пізні строки здійснення події визначаються за формулами (30) або (31) та (32) або (33) відповідно.
![]() , (30)
, (30)
![]() , (31)
, (31)
або
![]() , (32)
, (32)
![]() , (33)
, (33)
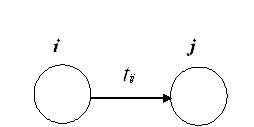
де ![]() - час виконання роботи ij;
- час виконання роботи ij;
І – вихідна подія сітьового графіка;0
с – завершальна подія сітьового графіка;
![]() - максимальний шлях, що проходить
через подію і;
- максимальний шлях, що проходить
через подію і;
![]() - критичний
шлях.
- критичний
шлях.
Резерв часу події – проміжок часу, на який можна відкласти відбуття події без порушень строків завершення розробки (проекту) в цілому.
Резерв часу події визначається як різниця між пізнім та раннім строками здійснення події:
![]() (34)
(34)
Визначення основних параметрів робіт (ранні та пізні початок і закінчення робіт, повні та вільні резерви робіт) виконують за допомогою формул (35)...(40).
Ранній з можливих строків початку роботи ij:
![]() . (35)
. (35)
Пізній з допустимих строків початку роботи ij:
![]() .(36)
.(36)
Ранній з можливих строків завершення роботи ij:
![]() .(37)
.(37)
Пізній з допустимих строків завершення роботи ij:
![]() .(38)
.(38)
Повний резерв часу роботи ij (![]() ) – максимальна кількість часу, на
яку можна збільшити тривалість даної роботи, не змінюючи тривалість критичного
шляху.
) – максимальна кількість часу, на
яку можна збільшити тривалість даної роботи, не змінюючи тривалість критичного
шляху.
![]() .(39)
.(39)
Якщо резерв частково або повністю використовувати для збільшення тривалості певної роботи, то зменшиться резерв часу всіх інших робіт, що лежать на відповідному шляху.
Вільний резерв часу роботи ij (![]() ) - максимальна кількість часу, на
яку можна збільшити тривалість роботи або відкласти її початок, не змінюючи при
цьому ранніх строків початку наступних робіт за умови того, що початкова подія
цієї роботи наступила в свій ранній строк.
) - максимальна кількість часу, на
яку можна збільшити тривалість роботи або відкласти її початок, не змінюючи при
цьому ранніх строків початку наступних робіт за умови того, що початкова подія
цієї роботи наступила в свій ранній строк.
![]() . (40)
. (40)
Результати розрахунків параметрів робіт слід представити у вигляді табл. 13.
Таблиця 13
Параметри робіт сітьового графіку
|
Шифр роботи |
|
|
|
|
|
|
|
| 1-2 | 1 | 0 | 1 | 42 | 43 | 43 | 0 |
| 2-3 | 3 | 1 | 4 | 41 | 44 | 43 | 0 |
| 3-4 | 1 | 4 | 5 | 46 | 47 | 43 | 0 |
| 3-6 | 1 | 11 | 12 | 46 | 47 | 36 | 7 |
| 4-5 | 4 | 9 | 13 | 44 | 47 | 38 | 0 |
| 4-7 | 4 | 9 | 13 | 44 | 48 | 39 | 5 |
| 5-6 | 3 | 12 | 15 | 37 | 40 | 28 | 0 |
| 5-7 | 5 | 14 | 19 | 42 | 47 | 33 | 0 |
| 6-7 | 1 | 13 | 4 | 39 | 40 | 27 | 1 |
| 7-8 | 2 | 16 | 18 | 50 | 52 | 34 | 0 |
| 8-9 | 6 | 22 | 28 | 48 | 54 | 32 | 0 |
| 8-11 | 10 | 26 | 36 | 44 | 54 | 28 | 5 |
| 9-10 | 2 | 24 | 26 | 52 | 55 | 31 | 0 |
| 10-11 | 7 | 31 | 38 | 50 | 57 | 26 | 0 |
| 11-12 | 2 | 33 | 35 | 62 | 64 | 31 | 0 |
| 12-13 | 4 | 37 | 41 | 62 | 66 | 29 | 0 |
| 12-14 | 15 | 48 | 63 | 34 | 49 | 1 | 1 |
| 13-14 | 12 | 49 | 61 | 57 | 69 | 20 | 0 |
| 14-15 | 2 | 51 | 53 | 79 | 81 | 30 | 0 |
| 15-16 | 5 | 56 | 61 | 51 | 56 | 0 | 0 |
| 16-17 | 1 | 57 | 58 | 82 | 83 | 26 | 0 |
| 16-22 | 6 | 98 | 104 | 86 | 92 | 6 | 54 |
| 17-19 | 3 | 60 | 63 | 57 | 60 | 0 | 0 |
| 19-20 | 4 | 64 | 68 | 60 | 64 | 0 | 0 |
| 20-21 | 16 | 80 | 96 | 64 | 80 | 0 | 0 |
| 21-22 | 18 | 98 | 116 | 80 | 98 | 0 | 0 |
| 22-23 | 3 | 101 | 104 | 98 | 101 | 0 | 0 |
| 23-24 | 9 | 110 | 119 | 101 | 110 | 0 | 0 |
| 24-25 | 2 | 112 | 114 | 100 | 112 | 0 | 19 |
| 25-26 | 4 | 114 | 119 | 110 | 114 | 0 | 0 |
5.3. Кошторис витрат на науково-дослідні та дослідно-конструкторські роботи
Кошторис розробляється виконавцем робіт на основі календарного плану виконання робіт (сітьового графіка) і затверджується замовником або органом, що забезпечує фінансування робіт.
Витрати, що включаються у собівартість НДДКР, групуються відповідно до їх економічного змісту за такими елементами.
5.3.1. Матеріальні витрати
Таблиця 14
Матеріальні витрати
|
Назва матеріалу |
Стандарт, Технічні умови |
Одиниця виміру |
Кількість |
Ціна одиниці, грн. |
Сума, грн. |
Обґрунтування |
| Витрати на користування мережею Інтернет | Gb | 1 | 24,00 | 24,00 | ||
| Державна науково-технічна бібліотека України | річний пропуск | 1 | 6,00 | 6,00 | ||
| Витрати на ксерокс | лист | 150 | 0,25 | 37,50 | ||
| Принтер | шт | 1 | 356,00 | 356,00 | ||
| Папір формату А1 | лист | 3 | 2,00 | 6,00 | ||
| Папір формату А4 | уп | 1 | 19,00 | 19,00 | ||
| Витрати на друк формату А1 | лист | 3 | 6,50 | 19,50 | ||
| Всього | 468 | |||||
| Невраховані матеріали | 25,4 | |||||
| Всього | 493,4 | |||||
| Транспортно-заготівельні витрати (5-15%) | 49,3 | |||||
| Загалом | 542,7 | |||||
Таблиця 15 Покупні вироби
|
Назва Виробу |
Стандарт, технічні умови |
Кількість, одиниці |
Ціна одиниці, грн. |
Сума, грн. |
Обґрунтування |
| Акселерометр ADXL330 | 1 | 300 | 300 | ||
| Датчик температур | 1 | 30 | 30 | ||
| Шнур для ЕОМ | 1 | 10 | 10 | ||
| Камера зміни температур | 1 | 350 | 350 | ||
| Дріт | 10 | 1 | 10 | ||
| Всього | 700 | ||||
| Невраховані покупні вироби (5-20%) | 105 | ||||
| Всього | 805 | ||||
| Транспортно-заготівельні витрати (5-15%) | 80,5 | ||||
| Загалом | 885,5 | ||||
5.3.2. Витрати на оплату праці
До цього елементу належать витрати на виплату основної і додаткової заробітної плати виконавців, обчислені згідно із системами оплати праці, прийнятими в організації, включаючи всі види матеріальних та грошових доплат.
Основна заробітна плата розраховується на основі даних про трудомісткість окремих робіт (наприклад, встановлених в сітьовому графіку) і посадових окладів основних виконавців НДР. Інформацію про трудомісткість робіт зводять до табл.16.
Таблиця 16
Трудомісткість виконання робіт
|
Шифр роботи | Трудомісткість, людино-дні |
Всього, людино-дні |
|
||||||
|
Керівник Проекту |
Головний інженер | Робочий 1 | Робочий 2 | Асистент |
|
||||
|
1-2 | 1 | 0 | 0 | 0 | 0 | 1 |
|
||
|
2-3 | 3 | 0 | 0 | 0 | 0 | 3 |
|
||
|
3-4 | 1 | 0 | 0 | 0 | 0 | 1 |
|
||
|
3-6 | 0 | 0 | 0 | 0 | 1 | 1 |
|
||
| 4-5 | 0 | 0 | 0 | 0 | 4 | 4 | ||||
| 4-7 | 0 | 4 | 0 | 0 | 0 | 4 | ||||
| 5-6 | 0 | 0 | 1 | 1 | 1 | 3 | ||||
| 5-7 | 0 | 0 | 5 | 5 | 0 | 10 | ||||
| 6-7 | 0 | 0 | 0 | 0 | 1 | 1 | ||||
| 7-8 | 2 | 2 | 0 | 0 | 2 | 6 | ||||
| 8-11 | 0 | 0 | 10 | 10 | 0 | 20 | ||||
| 8-9 | 0 | 6 | 0 | 0 | 0 | 6 | ||||
| 9-10 | 2 | 0 | 0 | 0 | 0 | 2 | ||||
| 10-11 | 0 | 7 | 0 | 0 | 7 | 14 | ||||
| 11-12 | 0 | 2 | 0 | 0 | 2 | 4 | ||||
| 12-15 | 0 | 0 | 0 | 0 | 15 | 15 | ||||
| 12-13 | 0 | 0 | 4 | 0 | 0 | 4 | ||||
| 13-14 | 0 | 12 | 0 | 0 | 0 | 12 | ||||
| 14-15 | 0 | 2 | 0 | 0 | 2 | 4 | ||||
| 15-16 | 0 | 5 | 0 | 0 | 5 | 10 | ||||
| 16-17 | 0 | 0 | 0 | 0 | 1 | 1 | ||||
| 16-22 | 6 | 0 | 0 | 0 | 0 | 6 | ||||
| 17-19 | 0 | 3 | 0 | 0 | 0 | 3 | ||||
| 19-20 | 0 | 0 | 0 | 0 | 4 | 4 | ||||
| 20-21 | 0 | 0 | 16 | 0 | 0 | 16 | ||||
| 21-22 | 0 | 0 | 0 | 18 | 0 | 18 | ||||
| 22-23 | 0 | 3 | 0 | 0 | 0 | 3 | ||||
| 23-24 | 0 | 0 | 0 | 0 | 9 | 9 | ||||
| 24-25 | 0 | 2 | 0 | 0 | 0 | 2 | ||||
| 25-26 | 0 | 0 | 0 | 0 | 4 | 4 | ||||
| Всього | 14 | 43 | 36 | 34 | 58 | 190 | ||||
Денну заробітну плату визначають виходячи з місячних окладів, враховуючи тривалість умовного місяця (25,4 днів - при 6-ти денному робочому тижні; 21,1 днів - при 5-ти денному робочому тижні). Результати розрахунків основної заробітної плати виконавців зводять у табл.17.
Таблиця 17
Основна заробітна плата виконавців
|
Місячний оклад, грн. |
Денна заробітна плата, грн. |
Трудомісткість, людино-дні |
Основна заробітна плата, грн. |
|
| Керівник проекту | 3500 | 165,88 | 14 | 2322,32 |
| Головний інженер | 2500 | 118,48 | 43 | 5094,64 |
| Робочий 1 | 2000 | 94,79 | 36 | 3412,44 |
| Робочий 2 | 2000 | 94,79 | 34 | 3222,86 |
| Асистент | 1500 | 71,09 | 58 | 4123,22 |
| Всього | 18175,48 | |||
Додаткова заробітна плата (премії, одноразові заохочення та ін.) розраховується згідно з нормативом, який встановлює підприємство і який складає 30 % від основної заробітної плати.
Додаткова заробітна плата в розмірі 30 % складає: 5452 грн.
Сума основної та додаткової заробітної плати складає витрати по статті "Заробітна плата" або фонд оплати праці складає:
Сума основної та додаткової заробітної плати складає – 23628,124
5.3.3. Відрахування на соціальні заходи
До цього елементу належать витрати здійснювані у порядку та розмірах, передбачених законодавством України.
Державне пенсійне страхування 33,2 % - 7844,53 грн.
Соціальне страхування на випадок безробіття 1,3 % - 307,16 грн.
Соціальне страхування від нещасних випадків на виробництві 1,7 % - 401,5грн.
Соціальне страхування у зв’язку з тимчасовою втратою працездатності 1,5 % - 354,5грн.
Відрахування на соціальні заходи: 8907,61 грн.
5.3.4. Витрати на спеціальне обладнання
У цій статті розраховуються витрати на придбання машин, приладів та іншого обладнання, яке необхідне тільки для цієї НДР. Розрахунок витрат на придбання обладнання проводиться так само, як для витрат на куповані вироби, з обов'язковим урахуванням транспортно-заготівельних витрат (табл. 18). Звичайне обладнання, необхідне для оснащення лабораторій, робочих місць та для інших цілей в цю статтю витрат не включають.
Таблиця 18 Спеціальне обладнання
|
Назва Обладнання |
Стандарт, технічні умови |
Кількість, одиниць |
Ціна, грн. |
Сума, грн. |
Обґрунтування |
| Електронна схема компоновки роботи датчика ADXL 330 | 1 | 1200 | 1200 | ||
| Всього | 1200 | ||||
| Транспортно-заготівельні витрати (5-15%) | 120 | ||||
| Загалом | 1320 | ||||
5.3.5. Витрати на службові відрядження
Відряджень не заплановано.
5.3.6. Експериментально-виробничі витрати
Вони включають витрати на виготовлення стендів, дослідних взірців, окремих вузлів, деталей та ін., коли вони виготовляються в інших самостійних відділах або в інших організаціях. У більшості випадків розрахунок цих витрат ведеться шляхом розрахунку собівартості.
Ця стаття враховує витрати на оплату машинного часу, пов'язаного з підготовкою і налагодженням програм. Витрати розраховуються виходячи з кількості годин машинного часу, який необхідний для виконання потрібного обсягу обчислювальних робіт по темі і вартості однієї машинної години. Результати розрахунків оформляють і вигляді табл. 19.
Таблиця 19
Витрати на оплату машинного часу
| Роботи, які виконуються на ЕОМ | Тривалість виконання роботи, год. | Вартість однієї машино-години, грн. | Сума витрат, грн. |
| Пошук інформації про ОК | 25 | 1,5 | 37,5 |
| Пошук інформації про існуючі методи | 30 | 1,5 | 45 |
| Підготовка документації | 15 | 1,5 | 22,5 |
| Креслення | 15 | 1,5 | 22,5 |
| Всього | 127,5 | ||
5.3.7. Накладні витрати
Витрати по цій статті розраховуються за нормативом, встановленим підприємством відносно до заробітної платні, який може знаходитися в межах 50 - 100%; для НТУУ (КПІ) - 67% по відношенню до заробітної плати, або 20 % від 11-ої статті "Повна вартість роботи, виконаної власними силами".
Накладні витрати складають –23628,124*0,67=15830грн.
5.3.8. Прибуток
Прибуток визначається у відсотках від суми витрат, найчастіше в проміжку (10-35%). Для НТУУ (КПІ) прибуток становить (5-10%).
Прибуток:
(23628,124+542,7+885,5+8907,61 +1320+127,5+15830)*0,1=5124,22
5.3.9. Загальні витрати
Загальні витрати:
23628,124+542,7+885,5+8907,61 +1320+127,5+15830+5124,22 =56365,66
5.3.10. Податок на додану вартість (ПДВ)
ПДВ обчислюється в розмірі 20 % від загальних витрат (статті. 5.3.9). Якщо робота фінансується з державного бюджету, то ПДВ не нараховується.
ПДВ=0,2*56365,66=11273,2
5.3.11. Повна вартість роботи, виконаної власними силами
Це сума статей 5.3.9 та 5.3.10. У тексті роботи треба навести усі статті витрат з усіма необхідними розрахунками. При цьому необхідно зберегти нумерацію та назви статей. Якщо за якоюсь статтею витрати не передбачені, то необхідно вказати: "Витрати не передбачені".
Підсумки розрахунків зводяться в таблицю, яку треба виконати на окремій сторінці.
Повна вартість роботи: 11273,2+56365,66=67638,8
Висновок до організаційно-економічного розділу
Вартість будь-якої продукції дуже впливає на її популярність серед споживачів. Ціна в свою чергу може залежати як від якості вибраних матеріалів так і від технічного рівня приладу, тому на це також важливо звертати увагу. В даному проекті ведеться аналіз та вибір мікро механічного акселерометра.
Було проведено оцінку рівня якості датчика з метою порівняльного аналізу і визначення найефективнішого в технічному відношенні варіанта інженерного рішення. Було виявлено, що рівень якості даного датчика вищій за рівень аналога. Коефіцієнт технічного рівня становить 1,08. Отже датчик, що розробляється краще аналога і може повністю його замінити.
Було проведено сітьове планування науково-дослідних та дослідно-конструкторських робіт. Таке планування дає змогу чітко визначити яку роботу необхідно виконати, та дає змогу розподілити обов’язки між співробітниками. Визначивши та описавши всі роботи та події, вони були розподілені за окремими виконавцями. Крім того було визначено тривалість робіт та їх трудомісткість, а також параметри робіт та подій.
Розробивши план проведення НДДКР, було підраховано кошторис витрат: матеріальні витрати, витрати на заробітну плату, відрахування на соціальні заходи, витрати на спеціальне обладнання, експериментально-виробничі витрати, накладні витрати і т.д. Загалом кошторис витрат на проведення НДДКР склав 67051,488 грн.
Висновки
В ході виконання курсової роботи були розглянуті питання про застосування мікромеханічних акселерометрів на рухомому об’єкті, автомобілі. Представлені кінематичні схеми, блок схеми акселерометрів різних видів, схеми чутливих елементів, ресорних підвісів, розглянуто принцип дії акселерометрів, приведені таблиці з технічними характеристиками, графіки вихідних сигналів. Представлені рисунки із схемами застосування та розташування акселерометрів на автомобілі з чітким поясненням відповідності роботи та завдання кожного з них.
Мікромеханічні прилади по своїй природі є мініатюрними приладами, тому представлені матеріали, що дають змогу зрозуміти, технологію виробництва акселерометрів, зокрема технологію та методи вирощування кристалів.
Найбільш важливим є вимірювання мікропереміщень, тому розглянуто методи вимірювання згідно яким зроблено висновок, щодо кращих методів вимірювання мікропереміщень чутливих елементів мікромеханічних приладів, один з яких є вимірювання за допомогою ємнісного перетворювача.
В економічній частині проекту було проведено оцінку рівня якості приладу з метою порівняльного аналізу і визначення найефективнішого в технічному відношенні варіанта інженерного рішення. Коефіцієнт технічного рівня становить 1,08. Отже датчик, що розробляється м оже повністю замінити свого аналога.
Розробивши план проведення НДДКР, було підраховано кошторис витрат: матеріальні витрати, витрати на заробітну плату і т.д. Загалом кошторис витрат на проведення НДДКР склав 67051,488 грн.