
Рефераты по авиации и космонавтике
Рефераты по административному праву
Рефераты по безопасности жизнедеятельности
Рефераты по арбитражному процессу
Рефераты по архитектуре
Рефераты по астрономии
Рефераты по банковскому делу
Рефераты по сексологии
Рефераты по информатике программированию
Рефераты по биологии
Рефераты по экономике
Рефераты по москвоведению
Рефераты по экологии
Краткое содержание произведений
Рефераты по физкультуре и спорту
Топики по английскому языку
Рефераты по математике
Рефераты по музыке
Остальные рефераты
Рефераты по биржевому делу
Рефераты по ботанике и сельскому хозяйству
Рефераты по бухгалтерскому учету и аудиту
Рефераты по валютным отношениям
Рефераты по ветеринарии
Рефераты для военной кафедры
Рефераты по географии
Рефераты по геодезии
Рефераты по геологии
Рефераты по геополитике
Рефераты по государству и праву
Рефераты по гражданскому праву и процессу
Рефераты по кредитованию
Рефераты по естествознанию
Рефераты по истории техники
Рефераты по журналистике
Рефераты по зоологии
Рефераты по инвестициям
Рефераты по информатике
Исторические личности
Рефераты по кибернетике
Рефераты по коммуникации и связи
Рефераты по косметологии
Рефераты по криминалистике
Рефераты по криминологии
Рефераты по науке и технике
Рефераты по кулинарии
Рефераты по культурологии
Реферат: Проектирование и предварительный расчет точности полигонометрического хода при создании геодезического обоснования
Реферат: Проектирование и предварительный расчет точности полигонометрического хода при создании геодезического обоснования
Содержание:
1. Введение
2. Физико-географическая характеристика района проектирования
3. Принципы, цели и методы проектирования
4. Составление проекта
5. Характеристика главной геодезической основы
6. Геометрические параметры хода (на основе решения обратных геодезических задач)
7. Критерии вытянутости хода
8. Расчет точности полигонометрического хода
9. Расчет точности положения конечной точки хода
10. Расчет точности линейных измерений
11. Расчет точности угловых измерений
12. Привязочные работы в полигонометрии
13. Схемы центров заложения опорных знаков полигонометрии
14. Заключение
15. Список использованной литературы
16. Приложение
1. Введение
Целью данной курсовой работы является выполнение проектирования и предварительный расчет точности опорной межевой сети в виде полигонометрии 4-го класса.
Задачи, решаемые в ходе курсового проектирования: закрепление и расширение специальных знаний, приобретение опыта проектирования, самостоятельного обобщения выводов и рекомендаций на основе выполненных расчетов.
Проект составляется на территорию, ограниченную рамкой трапеции карты масштаба 1:50000. Проектирование выполняется в соответствии с требованиями к построению государственных геодезических сетей, изложенных в «Основных положениях о построении государственных геодезических сетей».
Полигонометрический ход проложен между пунктами триангуляции, имеющимися на карте с учетом топографии района. Ход запроектирован на местности, наиболее благоприятной для производства линейных и угловых измерений. Ход запроектирован вытянутой формы, что позволит применить упрощенные формулы для предварительного расчета точности построения.
Работа состоит из пояснительной записки и приложения, в котором отражена графическая часть. В графической части представлены:
- копия топографической карты с проектом трассы и используемой геодезической основой;
- схема - выкопировка хода на кальке с карты, с указанием вычисленных углов и длин линий, координат опорных пунктов и запроектированных знаков;
- продольные профили местности для определения взаимной видимости между пунктами хода;
- решение обратных геодезических задач;
- схема хода, выполненная для расчета характеристик, устанавливающих форму хода;
- схемы центров заложения опорных знаков полигонометрии.
В пояснительной записке изложены расчеты, оценка их точности, выводы.
2. Физико-географическая характеристика района проектирования
Район проектирования представляет собой волнистую равнину, расчленённую речными долинами. Водоразделы слегка округлые и плоские. Присутствует одна господствующая возвышенность, высотой 128,9 м. Средние высоты района проектирования – 80-100 метров. Основная форма рельефа – равнинный.
Район проектирования опорно-межевой сети пересекает две реки. Долины рек врезаны на высоте 70-80 метров.
Растительность представлена лесополосами, сенокосом, порослью и широколиственными деревьями.
Неподалеку от района проектирования расположен г. Эльзен, г. Молезон; населенные пункты – Кляйн-Вольтерсдорф, Зеедорф. Через данный район проходит автодорога на Ланбург.
Район проектирования представляет собой незастроенную территорию.
3. Принципы, цели и методы проектирования
Основная задача проектирования состоит в том, чтобы из всех возможных вариантов выбрать тот вариант полигонометрических ходов и сетей, который по точности соответствовал бы поставленным задачам, а для осуществления требовал бы минимальных трудовых и денежных затрат.
Проектирование полигонометрических ходов и сетей 4 класса, производят с учетом масштаба и метода предстоящих съемок, требований Инструкции о построении государственных геодезических сетей.
До начала проектирования необходимо определить границы обеспечиваемого района; собрать данные об условиях работ в нем: сведения о путях и средствах сообщения, метеорологические сведения, физико-географические и геоморфологические описания, данные гидрологических исследований и т. п.; собрать топографические карты масштаба 1 : 25 000 и крупнее, схемы ранее исполненных триангуляционных и полигонометрических сетей, чтобы установить наличие и пригодность исходных пунктов (топографо-геодезическую изученность). Кроме того, до начала работ надо выяснить необходимую густоту обеспечения территории геодезическими пунктами с учетом перспективы развития территорий согласно генеральному плану и плану освоения земель, а также точность определения положения пунктов, дирекционных углов и длин линий.
Полигонометрические ходы проектируют в виде отдельных разомкнутых ходов, опирающихся на два исходных пункта. При обеспечении геодезическими пунктами значительных площадей проектируют полигонометрические сети. При этом следует учитывать, что ходы и сети 4 класса должны опираться на пункты триангуляции и полигонометрии высших классов.
При составлении проекта вначале задаются наиболее целесообразной схемой построения сети, точностью измерения углов и линий и рассчитывают ожидаемые ошибки. Если ожидаемая точность не удовлетворяет предъявляемым требованиям, то изменяют схему построения и повторяют расчет.
Детальное проектирование полигонометрических ходов 4 класса, для незастроенной территории производят на топографических картах масштаба 1 : 25 000, а для застроенной территории — масштаба 1:10 000. На картах вначале наносят исходные пункты на территорию объекта и на смежные участки, после чего намечают направления отдельных ходов в соответствии с принятой схемой развития сети. Ходы намечают в тех местах, где они с максимальной эффективностью могут быть использованы, однако при этом учитывают и характер местности, и имеющиеся приборы для линейных измерений.
Ходы должны прокладываться по местности, наиболее благоприятной для производства угловых и линейных измерений.
В соответствии с этим ходы намечают вдоль дорог или около них, по долинам рек, по существующим лесным просекам, избегая заболоченных мест.
После того как намечено направление отдельных ходов, переходят к выбору положения отдельных пунктов с соблюдением максимальной и минимальной длины линий. Следует также помнить, что места, намечаемые для постановки полигонометрических знаков, должны обеспечивать их долговременную сохранность. Не следует предусматривать постановку знаков на пашне, болотах, оползнях и т. п.
После разработки проекта подсчитывают объем работ, определяют потребности в приборах, материалах, транспорте, техническом персонале и рабочей силе. На основе этого составляют смету затрат и план организации работ. Все эти документы затем уточняют на основании данных рекогносцировки.
4. Составление проекта
Проектирование и создание полигонометрических ходов осуществляются в несколько этапов: составление проекта, рекогносцировка трассы, установка знаков и закладка центров, измерения углов, измерения линий, привязка к пунктом ГГС, обработка результатов полевых измерений, предварительные вычисления и оценка точности полевых измерений, уравнительные вычисления и оценка точности полученных результатов, составление каталога и технического отчета.
Проектирование производят с учетом требований "Инструкции по топографической съемке в масштабах 1:5000, 1:2000,1:1000,1:500".
При составлении проекта предварительно вычисляется ожидаемая точность хода. С карты снимают [s], замыкающую L, число линий n, число углов n+1, максимальную и минимальную стороны, sср.
5. Характеристика главной геодезической основы
Учебная карта, на которой выполняется проектирование опорной межевой сети в виде полигонометрии 4-го класса, представляет собой топографическую карту масштаба 1:50 000. Координаты пунктов полигонометрии находятся в пределах: по оси абсцисс – 6004020.00 - 6004295.00, по оси ординат – 2407695.00 - 2415235.00.
В сетях полигонометрии 2-4-го классов должна обеспечиваться взаимная видимость по линии: визирная цель (отражательная установка) – место установки угломерного инструмента или дальномера.
При изыскании варианта построения полигонометрического хода следует руководствоваться следующими соображениями:
- местоположение и конструкция знаков должны обеспечивать их минимальные высоты;
- расположение пунктов должно быть примерно равномерное с использованием для них командных высот местности;
- места расположения пунктов должны обеспечивать долговременную сохранность центров, безопасность и удобство выполнения наблюдений;
- пункты должны выбираться на устойчивом грунте, в стороне от железных и автогужевых дорог, всякого рода строений, телефонных линий, не ближе, чем на расстоянии двойной высоты знака;
- удаленность пунктов от линии тока высокого напряжения должна быть не менее 120 м.
Высоты знаков могут рассчитываться аналитическим и графическим способами.
Если в створе между пунктами расположено несколько препятствий, то необходимые высоты знаков подсчитывают для каждого препятствия отдельно и из них выбирают те, которые требуют максимального значения высот знаков.
После расчета высот знаков по всем направлениям подбирают выгоднейшую их комбинацию по каждой паре пунктов. Экономически выгоднейшей высотой пары пунктов считается пара с наименьшей суммой высот.
Определив выгоднейшую высоту удаленного от препятствия знака, следует откорректировать высоту второго пункта.
Изменение высоты второго знака может быть рассчитано по правилу «коромысла»:
![]() ,
,
где DhA=H¢A-H A – изменение высоты первого пункта или новое значение высоты минус прежде рассчитанное.
Окончательно:
H¢B=HB+ DhB
Для контроля высоту знака определяют графически.
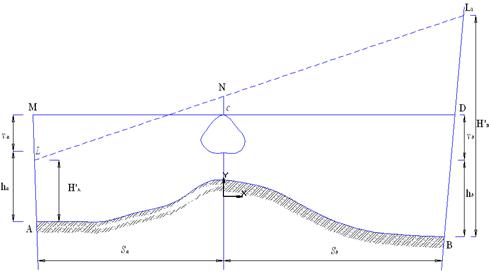
Оптимальная высота для каждой пары пунктов, обеспечивающая наименьшие затраты на постройку, может быть рассчитана по формулам
![]() ,
, ![]() ,
,
b = HA × Sb + HB × Sa
При проектировании полигонометрии не выше 4-го класса точности рекомендуется строить простые пирамиды общей высотой от 5 до 8 м. Простые пирамиды проектируют в открытых, всхолмленных районах, где видимость на смежные пункты открывается с земли и визирный луч проходит на установленной высоте над препятствием.
Построение и анализ продольных профилей местности предусматривает строительство пирамиды по направлению 7-8 высотой:
b = 97.5 × 350 + 86.7 × 230=54066 м
![]()
![]()
Следовательно на точке 7 нужно поставить пирамиду высотой 8 м.
6. Геометрические параметры хода (на основе решения обратных геодезических задач)
Найдем значение дирекционного угла и расстояние между пунктами, используя решение обратных геодезических задач.
Обратная геодезическая задача заключается в определении длины линии и ее дирекционного угла по координатам концов этой линии.
Определим дирекционный угол и длину линии для направления Эльзен – 1.
Δx1-2=x2-x1=6004020.00-6004140.00= -120
Δy1-2=y2-y1=2407695.00-2407105.00=590
![]()
II четверть.
α 1-2=180°-78°30'12"=101°29'48"
![]()
Определим дирекционный угол и длину линии для направления 1 – 2.
Δx=6004160.00-6004020.00= 140
Δy= 2408155.00-2407695.00= 460
![]()
I четверть.
α =73°04'21"
![]()
Определим дирекционный угол и длину линии для направления 2 – 3.
Δx =6004095.00-6004160.00= -65
Δy =2408645.00-2408155.00= 490
![]()
II четверть.
α =180°- 82°26'37"=97°33'23"
![]()
Определим дирекционный угол и длину линии для направления 3 – 4.
Δx =6004130.00-6004095.00= 35
Δy =2409175.00-2408645.00= 530
![]()
I четверть.
α =86°13'18"
![]()
Определим дирекционный угол и длину линии для направления 4 – 5.
Δx =6004055.00-6004130.00= -75
Δy =2409775.00-2409175.00= 600
![]()
II четверть.
α =180°- 82°52'30"=97°07'30"
![]()
Определим дирекционный угол и длину линии для направления 5 – 6.
Δx =6004190.00-6004055.00= 135
Δy =2410295.00-2409775.00= 520
![]()
I четверть.
α =75°26'47"
![]()
Определим дирекционный угол и длину линии для направления 6 – 7.
Δx =6004060.00-6004190.00= -130
Δy =2410810.00-2410295.00= 515
![]()
II четверть.
α =180°- 75°49'59"=104°10'01"
![]()
Определим дирекционный угол и длину линии для направления 7 – 8.
Δx =6004205.00-6004060.00= 205
Δy =2411390.00-2410810.00= 580
![]()
I четверть.
α =70°32'03"
![]()
Определим дирекционный угол и длину линии для направления 8 – 9.
Δx =6004110.00-6004060.00= 50
Δy =2412000.00-2411390.00= 610
![]()
I четверть.
α =85°18'51"
![]()
Определим дирекционный угол и длину линии для направления 9 – 10.
Δx =6004165.00-6004110.00= 55
Δy =2412600.00-2412000.00= 600
![]()
I четверть.
α =84°45'45"
![]()
Определим дирекционный угол и длину линии для направления 10 – 11.
Δx =6004285.00-6004165.00= 120
Δy =2413205.00-2412600.00= 605
![]()
I четверть.
α =78°46'52"
![]()
Определим дирекционный угол и длину линии для направления 11 – 12.
Δx =6004205.00-6004285.00= -80
Δy =2413945.00-2413205.00= 740
![]()
II четверть.
α =180°-83°49'47"=96°10'13"
![]()
Определим дирекционный угол и длину линии для направления 12 – 13.
Δx =6004295.00-6004205.00= 90
Δy =2414555.00-2413945.00= 610
![]()
I четверть.
α =81°36'25"
![]()
Определим дирекционный угол и длину линии для направления 13 – 14.
Δx =6004160.00-6004295.00= -135
Δy =2415235.00-2414555.00= 680
![]()
II четверть.
α =180°-78°46'16"=101°13'44"
![]()
Определим дирекционный угол и длину линии для направления 14 – Кольреп.
Δx =6003925.00-6004160.00= -235
Δy =2416700.00-2415235.00= 1465
![]()
II четверть.
α =180°-80°53'13"=99°06'47"
![]()
Обобщим полученные данные и представим их в форме таблицы 1.
Таблица 1.
| Номера точек | Углы | Дирекционные углы | Длины линий, м | Координаты | ||
| Х,м | У,м | |||||
| Эльзен | 274°25'00'' | 6004140.00 | 2407105.00 | |||
| 101°29'48'' | 602.08 | |||||
| 1 | 151°34'33'' | 6004020.00 | 2407695.00 | |||
| 73°04'21'' | 480.83 | |||||
| 2 | 204°29'02'' | 6004160.00 | 2408155.00 | |||
| 97°33'23'' | 494.29 | |||||
| 3 | 168°39'55'' | 6004095.00 | 2408645.00 | |||
| 86°13'18'' | 531.15 | |||||
| 4 | 190°54'12'' | 6004130.00 | 2409175.00 | |||
| 97°07'30'' | 604.67 | |||||
| 5 | 158°19'17'' | 6004055.00 | 2409775.00 | |||
| 75°26'47'' | 537.24 | |||||
| 6 | 208°43'14'' | 6004190.00 | 2410295.00 | |||
| 104° 10'01'' | 531.15 | |||||
| 7 | 146°22'02'' | 6004060.00 | 2410810.00 | |||
| 70°32'03" | 580.00 | |||||
| 8 | 194°46'48'' | 6004205.00 | 2411390.00 | |||
| 85°18'51'' | 612.05 | |||||
| 9 | 179°26'54'' | 6004110.00 | 2412000.00 | |||
| 84°45'45'' | 602.52 | |||||
| 10 | 174°01'07'' | 6004165.00 | 2412600.00 | |||
| 78°46'52'' | 616.79 | |||||
| 11 | 197°23'21'' | 6004285.00 | 2413205.00 | |||
| 96°10'13'' | 744.31 | |||||
| 12 | 165°26'12'' | 6004205.00 | 2413945.00 | |||
| 81°36'25'' | 616.60 | |||||
| 13 | 199°37'19'' | 6004295.00 | 2414555.00 | |||
| 101°13'44'' | 693.27 | |||||
| 14 | 177°53'03'' | 6004160.00 | 2415235.00 | |||
| 99°06'47'' | 1483.73 | |||||
| Кольреп | 29°37'30'' | 6003925.00 | 2416700.00 | |||
| 128°44'17'' | ∑=9730.68 | |||||
7. Критерии вытянутости хода
Проложить полигонометрический ход с углами поворота в 180° практически невозможно, поэтому ход может считаться вытянутым с некоторым приближением. Критерии степени изогнутости хода необходимы при расчетах точности ходов при их проектировании.
Ход можно считать достаточно вытянутым, если точки хода отклоняются в обе стороны от линии, проведенной через центр тяжести параллельно замыкающей хода, в среднем на величину 1:24 ( в пределе на 1:8) длины самой замыкающей, и линии хода отклоняются от направления замыкающей в обе стороны на 8°( в пределе на 24°). При этом предельного значения может достигнуть лишь одна из ординат или один из углов отклонения.
В
качестве критерия степени изогнутости используется отношение [s]:L. Ход считается вытянутым, если [s]:L![]() l,3 (рис.1)
l,3 (рис.1)
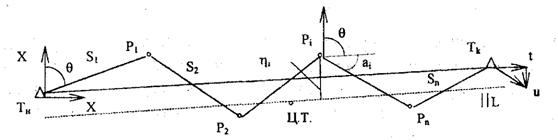
Рис. 1. Критерии степени изогнутости хода
Запроектированный в данной работе ход, является вытянутым, так как [s]/L = 1,02, и величины предельного значения уклонения направления сторон хода от направления замыкающей Θ, и расстояния от вершины хода до замыкающей, как следует из чертежа, меньше предельных значений.
8. Расчет точности полигонометрического хода
Точность хода характеризует предельная ошибка Dпред планового положения точки в самом слабом месте после уравнивания.
Учитывая, что средняя квадратическая ошибка m положения точки хода в самом слабом месте (в середине) после уравнивания равна половине средней квадратической ошибки M конечной точки до уравнивания, т.е.
![]() , получаем Dпред = 2m = M .
, получаем Dпред = 2m = M .
Значение M можно определить из выражения
пред×fS = 2M,
в котором предельная линейная невязка пред×fS находится в соотношении
![]() ,
,
где [S] - длина хода;
![]() - точность
полигонометрического хода соответствующего класса, устанавливаемая инструкцией
по построению сетей.
- точность
полигонометрического хода соответствующего класса, устанавливаемая инструкцией
по построению сетей.
![]()
пред×fS=0.39 м
Для вычисления отношения [S]:T стороны хода возьмем из решения обратных геодезических задач по прямоугольным координатам X,Y.
Следовательно,
![]() (1)
(1)
![]()
Самое слабое место запроектированного полигонометрического хода длиной L характеризуется величиной ошибки, вычисленной по формуле (1).
9. Расчет точности положения конечной точки хода
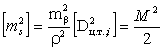
Вычисления производят с помощью формулы средней квадратической погрешности положения конечной точки полигонометрического хода М. Ее величина при вычислении хода по исправленным за угловую невязку углам может быть подсчитана при измерении сторон светодальномерами и короткобазисным параллактическим методом по формуле
![]()
где тS, тβ — соответственно средние квадратические погрешности измерения стороны и угла;
Dц, i —расстояние от точки с номером I до центра тяжести хода.
Ошибка положения конечной точки М при исправленных за невязку углах зависит от ошибок измерений, степени изогнутости хода и количества углов поворота.
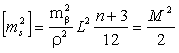
Для ходов вытянутой формы с примерно равными сторонами формулу следует заменить формулой
![]()
Применив принцип равных влияний, т. е. равенство влияний погрешностей угловых и линейных измерений на конечный результат, можно записать для хода любой формы
Для вытянутого хода эти соотношения соответственно примут вид
![]()
![]()

При равных условиях, предварительное исправление углов понижает влияние угловых измерений на поперечную невязку вытянутого хода примерно вдвое и уменьшает общий сдвиг конечной точки хода.
10. Расчет точности линейных измерений
В зависимости от применяемых методов линейных измерений средняя квадратическая ошибка M в положении конечной точки вытянутого хода при предварительно уравненных углах, при измерении линий светодальномером, может быть вычислена по формуле:
![]() ;
;
Применяя принцип равных влияний, т.е. считая, что угловые и линейные измерения одинаково влияют на точность положения конечной точки хода, среднюю квадратическую ошибку измерения сторон можно вычислить, используя выражения:
![]()
Расчет точности линейных измерений следует произвести для светодальномеров, применяемых в производстве в настоящее время. При выборе любого из светодальномеров должно соблюдаться условие
![]() .
.
![]()
![]()
![]()
![]()
Рекомендуемый светодальномер типа Кварц обеспечивает требуемую точность полигонометрического хода. Основные технические характеристики светодальномеров указаны в табл.2
Таблица 2
Основные технические характеристики светодальномеров
| Характеристика | Тип дальномера | |||||||
| Кварц | Рейндж мастер США | Гранат | Мекометр 3000 | ДК-001 | 2СМ-2 | СМ-5 | Блеск | |
| Диапазон расстояний, км | 1-30 | 0,001-60 | 0,1-20 | 0,01-2,5 | 0,0005-0,5 | 0,002-2,0 | 0,002-0,700 | 0,0002-5,0 |
| Средняя квадратическая погрешность измерения расстояния, мм |
10+ 2×10-6Д |
5+ 1×10-6Д |
5+ 2×10-6Д |
0,2+ 1×10-6Д |
0,8+ 1,5×10-6Д |
20 | 20¸30 |
10+ 5×10-6Д |
| Минимальные углы наклона приемопередатчика | ±9° | ±15° | ±20° |
+40° ¸ -45° |
-40° ¸ 90° |
+25° | ±20° | ±20° |
| Время измерения расстояния | 5" | 10" | 2-3¢ | 10¢ | 10¢ | 5" | 10¢ | |
11. Расчет точности угловых измерений
Среднюю квадратическую погрешность измерения угла тβ вычисляют из соотношения, полученного на основе принципа равных влияний:
![]() -
для изогнутого хода
-
для изогнутого хода
![]() -для
вытянутого хода
-для
вытянутого хода
Расстояния от центра тяжести хода до каждого пункта Dц, i получают графическим путем со схемы хода с учетом масштаба. Координаты центра тяжести хода хц и уц или вычисляют по формулам и наносят па схему или получают также графическим путем.
Найдем ![]() для вытянутого
хода по формуле
для вытянутого
хода по формуле
![]()
![]()
![]()
По найденной величине тβ выбирают прибор и метод угловых измерений. В запроектированном ходе должно соблюдаться соотношение
![]() ,
,
где mβ инстр — средняя квадратическая погрешность измерения угла теодолитом (инструментальная точность).
![]() =2˝
=2˝
Следовательно, в середине хода следует запроектировать определение дирекционного угла стороны хода путем проложения короткого угломерного хода к ближайшему твердому пункту. В этом случае расчетные формулы примут следующий вид:
![]()
где к — число секций хода. Для случая одного промежуточного твердого азимута или дирекционного угла к= 2.
![]()
![]()
![]()
Расчет величин влияний отдельных источников погрешностей при угловых измерениях производят исходя из того, что величина характеризует совместное влияние ряда источников погрешностей на результаты измерения, а именно: редукции и центрирования, инструментальных, собственно измерения и внешних условий. Погрешности исходных данных не учитываются. Следовательно,
![]()
откуда, применяя принцип равных влияний, получают
![]()
![]()
На основе данного соотношения рассчитывают точность установки визирной марки и теодолита над центрами знаков.
12. Привязочные работы в полигонометрии
Привязка полигонометрии к пунктам ГГС производится для определения координат пунктов полигонометрического хода и для передачи направления на стороны хода.
Для привязки необходимо иметь координаты начала и конца хода и дирекционные углы начальной и конечной сторон хода. Самый простой способ привязки - непосредственное примыкание хода к пунктам триангуляции или полигонометрии высшего класса. В этом случае привязка осуществляется измерением примычных углов. Вычислив по координатам пунктов дирекционные углы αн и αк, αк' можно передать дирекционные углы на стороны полигонометрического хода S1..Sn .
Значение и виды привязок.
Привязка полигонометрии к пунктам государственной геодезической сети производится для определения координат пунктов полигонометрического хода и для передачи направления на стороны хода.
Привязку полигонометрии к пунктам геодезической сети можно произвести различными способами в зависимости от расположения этих пунктов по отношению к пунктам полигонометрии.
Для привязки хода необходимо иметь координаты начала и конца хода и дирекционные углы исходных начальной и конечной сторон хода. Самым простым способом привязки является непосредственное примыкание полигонометрического хода к пунктам триангуляции или полигонометрии высшего класса. В этом случае привязка осуществляется измерением примычных углов.
Если известны координаты пунктов Тн и Тк, из которых видны пункты государственной геодезической сети Т'н, Т"н, Тк', Т"к, то на пункте Тн необходимо измерить примычные углы β1 и β1' , а на пункте Тк — углы βn+1 и β'n+1. Вычислив по координатам пунктов Тн, Т'н, Т"н, Тк, Т'к, Т''к ; дирекционные углы αн, α'н, αк, α'к сторон Т'нТн, Т''нТн, Т'кТк, Т''кТк, можно передать дирекционные углы на стороны полигонометрического хода s1, и sn. Этот способ привязки дает надежный контроль, так как разность примычных углов β1 и β'1, βn+1 и β'n+1 должна равняться разности дирекционных углов ан и а'н, ак и а'к.
В ряде случаев не удается один из концов хода или оба конца привязать к исходным направлениям. Например, когда на исходном пункте отсутствует видимость с земли на соседние пункты, наружные знаки пришли в ветхость, а центры на ориентирных пунктах потеряны. В таких случаях на этом конце хода осуществляют привязку лишь к пункту, а примычный угол между направлением последней линии хода и исходным направлением остается неизмеренным.
Однако в практике геодезических работ бывают случаи, когда непосредственно привязку полигонометрии к пунктам государственного геодезического обоснования осуществить почему-либо невозможно. Тогда применяют особые способы привязки, которые можно разделить на две группы: 1) привязка к близлежащему пункту; 2) привязка к отдаленному пункту.
Используя различные способы привязки, можно получить также координаты ряда боковых пунктов.
Привязка к отдаленным пунктам государственной геодезической сети.
Как известно, координаты пункта могут быть определены прямой и комбинированной засечками с двух исходных пунктов или обратной засечкой по трем исходным пунктам. В этих случаях координаты пункта будут получены по необходимому числу исходных пунктов и измерений. Засечки, в которых используется необходимое число пунктов и измерений, называют однократными. Координаты, определенные из однократных засечек, будут бесконтрольными как величины, определенные только по необходимому числу измерений.
Для того чтобы иметь контроль правильности определения координат, найденных из засечек, необходимо использовать избыточные пункты и произвести избыточные измерения. Засечки, в которых для получения координат пункта используют избыточное число пунктов и измерений, называют многократными.
Прямой многократной засечкой называется определение положения пункта путем измерения углов или- направлений на определяемый пункт не менее чем с трех пунктов, координаты которых известны.
Обратной многократной засечкой называется определение положения пункта путем измерения углов или направлений на определяемом пункте, не менее чем на четыре пункта, координаты которых известны.
В особых случаях привязки полигонометрического хода к отдаленным пунктам государственной геодезической сети эту задачу можно решить способом прямой или обратной многократной засечки.
Наличие избыточных измерений в многократных засечках приводит к уравнительным вычислениям.
Метод наименьших квадратов рассматривает два основных способа уравнивания: параметрический и коррелатный. Уравнивание можно выполнять любым из этих способов. Оба дают одни и те же значения для уравниваемых величин, но объем вычислительного труда при решении конкретных задач будет разный. Поэтому, прежде чем приступить к уравниванию, следует выбрать тот способ, который при решении этой задачи потребует меньшего объема вычислений. При наличии ЭВМ предпочтение отдают тому способу, для которого легче и наиболее эффективно можно составить программу вычислений.
При уравнивании результатов измерений в многократных засечках предпочтение отдают параметрическому способу. В этом способе число нормальных уравнений, которое предстоит решать при любом числе избыточных измерений, будет равно числу неизвестных. В многократных засечках неизвестных всегда два — координаты х и у искомого пункта.
Известно, что в параметрическом способе уравнивания каждое неизвестное (параметр) представляют в виде суммы двух слагаемых: приближенного значения и поправки к нему.
Для искомых координат х и у пункта Р это будет выражаться так:
Приближенные значения координат х0 и у0 получают из решения однократных засечек, а поправки δх и δу — из уравнивания результатов измерений по методу наименьших квадратов параметрическим способом с использованием дифференциальных формул дирекционного угла.
13. Схемы центров заложения опорных знаков полигонометрии
На основании утверждённого проекта производится рекогносцировка геодезических сетей. При рекогносцировке уточняется проект сети, направление ходов полигонометрии и намечаются места установки пунктов.
Полигонометрические ходы должны прокладываться по местности, наиболее благоприятной для производства угловых и линейных измерений. Места установки пунктов триангуляции и полигонометрии должны быть легкодоступны, хорошо опознаваться на местности и обеспечивать долговременную сохранность центров и знаков. Пункты на местности должны выбираться с учётом возможности использования их в качестве точек съёмочной сети. Между двумя смежными пунктами должна быть, как правило, обеспечена видимость с земли.
Рекогносцировка хода выполняется в два этапа. На первом этапе устанавливают изменения на участке с момента издания топографических карт, проверяют взаимную видимость. На втором этапе проект переносят в натуру, выбирая места для постановки пунктов. Центры пунктов имеют различную конструкцию и подразделяются на типы, которые зависят от физико-географических условий местности (характера грунта, глубины промерзания почвы и т.д.). Центры изготавливают из бетона, металлических труб, заполненных бетонным раствором; в бетонные блоки и трубы заделывают специальные чугунные марки с нанесенным отверстием или крестом; последние обозначают точку, координаты которой в дальнейшем определяются.
На застроенных территориях для пунктов выбирают фундаменты и стены бетонных и кирпичных зданий.
При наблюдении горизонтальных и вертикальных углов и измерении светодальномерами для обеспечения прямой видимости между пунктами приборы и визирные цели поднимают иногда на соответствующую высоту над поверхностью земли. Для этого сооружают наружные знаки: тур, простую пирамиду, пирамиду-штатив. Пирамиды строятся на тех пунктах, где наблюдения выполняются с поверхности земли. Визирные цели представляют собой цилиндры, продольная ось симметрии которых должна совпадать или быть параллельной оси знака.
Наружные знаки должны быть устойчивыми и прочными. Жёсткость наружных знаков должна обеспечивать возможность измерения углов при ветре средней силы.
Знаки должны быть симметричными относительно вертикальной оси. Уклонение проекций центров визирного цилиндра и столика для прибора от центра пункта должно быть, как правило не более 5 см. На геодезических знаках, установленных на крышах зданий, элементы приведения, как правило, должны быть сведены к нулю. Во всех случаях пирамида-штатив или внутренняя пирамида простого сигнала, несущая столик для прибора, не должна соприкасаться с площадкой наблюдателя.
14. Заключение
В данной курсовой работе было выполнено проектирование и предварительный расчет точности опорной межевой сети в виде полигонометрии 4-го класса.
Были решены следующие поставленные задачи: закрепление и расширение специальных знаний, приобретение опыта проектирования, самостоятельного обобщения выводов и рекомендаций на основе выполненных расчетов.
Проектирование выполнялось в соответствии с требованиями к построению государственных геодезических сетей, изложенных в «Основных положениях о построении государственных геодезических сетей».
Полигонометрический ход проложен между пунктами триангуляции, имеющимися на карте с учетом топографии района. Ход запроектирован на местности, наиболее благоприятной для производства линейных и угловых измерений, вытянутой формы, что позволило применить упрощенные формулы для предварительного расчета точности построения.
На основе критериев вытянутости хода было определено, что запроектированный в данной работе полигонометрический ход является вытянутым, также был произведен расчет точности полигонометрического хода, расчет точности положения конечной точки хода, расчет точности линейных измерений и расчет точности угловых измерений.
15. Список использованной литературы:
1. Основные положения о построении государственных геодезических сетей. - М.: Недра, 1974.-180с.
2. . Основные положения о государственной геодезической сети Российской Федерации, М.: ЦНИИГАиК, 2004 г. - 14 с.
3. Инструкция по нивелированию I, II, III, IV классов. - М: Недра, 1974.-160с.
4. Селиханович А.И. Учебник по геодезии для вузов. - М: Недра, 1982.-300с.
5. Методические указания к лабораторной работе «Уравнивание полигонометрических сетей способом последовательных приближений»/Сост. И.А.Басова/ТулГУ. - Тула, 1994.-19с.
6. Поклад Г.Г., Гриднев С. П. Геодезия: учебное пособие для вузов, М.: Академический Проект, 2007. - 592 с.
7. Давыдов М. Ф., Прудников Г. Г. Геодезия: учебник для техникумов. - Недра, 1984 - 174 с.
8. Неумывакин Ю. К., Перский М. И. Земельно-кадастровые геодезические работы - М.: Колосс, 2006. - 184 с.
9. Инструкция по развитию съемочного обоснования и съемке ситуации и рельефа с применением глобальных спутниковых навигационных систем ГЛОНАСС и (ЗР5. - М.: ЦНИИГАиК, 2002 г.-54 с.
10. Руководство по созданию и реконструкции городских геодезических сетей с использованием спутниковых систем ГЛОНАСС и 6Р5. - М.: ЦНИИГАиК, 2003 г. - 65 с.