
Рефераты по авиации и космонавтике
Рефераты по административному праву
Рефераты по безопасности жизнедеятельности
Рефераты по арбитражному процессу
Рефераты по архитектуре
Рефераты по астрономии
Рефераты по банковскому делу
Рефераты по сексологии
Рефераты по информатике программированию
Рефераты по биологии
Рефераты по экономике
Рефераты по москвоведению
Рефераты по экологии
Краткое содержание произведений
Рефераты по физкультуре и спорту
Топики по английскому языку
Рефераты по математике
Рефераты по музыке
Остальные рефераты
Рефераты по биржевому делу
Рефераты по ботанике и сельскому хозяйству
Рефераты по бухгалтерскому учету и аудиту
Рефераты по валютным отношениям
Рефераты по ветеринарии
Рефераты для военной кафедры
Рефераты по географии
Рефераты по геодезии
Рефераты по геологии
Рефераты по геополитике
Рефераты по государству и праву
Рефераты по гражданскому праву и процессу
Рефераты по кредитованию
Рефераты по естествознанию
Рефераты по истории техники
Рефераты по журналистике
Рефераты по зоологии
Рефераты по инвестициям
Рефераты по информатике
Исторические личности
Рефераты по кибернетике
Рефераты по коммуникации и связи
Рефераты по косметологии
Рефераты по криминалистике
Рефераты по криминологии
Рефераты по науке и технике
Рефераты по кулинарии
Рефераты по культурологии
Дипломная работа: Многомерная геометрия
Дипломная работа: Многомерная геометрия
ОГЛАВЛЕНИЕ
Введение
Глава I. Элементы общей теории многомерных пространств
§ 1. Историческая справка
§ 2. Понятие векторного многомерного пространства на основе аксиоматики Вейля.
§ 3. Евклидово векторное пространство
§ 4. Понятие точечно-векторного аффинного n-мерного пространства
Глава II. Многомерные геометрические образы в n-мерных пространствах
§ 5. Четырёхмерное пространство. Определение и его исследование
§ 6. Геометрия k-плоскостей в аффинном и евклидовом пространствах
§ 7. K-параллелепипеды в пространстве
§8. K-симплексы в пространстве
§ 9. K-шары в пространстве
Глава III. Применения многомерной геометрии
§ 10. О необходимости введения многомерного пространства (на примерах задач)
§ 11. Пространство-время классической механики
§ 12. Пространство-время специальной теории относительности
§ 13. Пространство-время общей теории относительности
Заключение
Литература
Введение
Многомерная геометрия в настоящее время широко применяется в математике и физике для наглядного представления уравнений с несколькими неизвестными, функций нескольких переменных и систем с несколькими степенями свободы.
Геометрический язык позволяет применить к решению сложных задач геометрическую интуицию, сложившуюся в нашем обычном пространстве.
К множеству задач, решаемых с помощью многомерной геометрии, относятся задачи о нахождении более выгодных вариантов перевозок, задачи о наиболее выгодных способах раскроя материала, наиболее эффективных режимах работы предприятий, задачи о составлении производственных планов и т. п. Тот факт, что эти задачи решаются геометрически с помощью нахождения наибольших или наименьших значений линейных функций на многогранниках (причём, как правило, в пространствах, имеющую размерность, большую трёх) был впервые подмечен Л. В. Канторовичем. Необходимость рассмотрения n-мерных пространств при n > 3 диктуется также математическими задачами физики, химии, биологии и других областей знания.
Таким образом, хотя пространственные свойства окружающего мира хорошо описываются геометрическим трёхмерным пространством, потребности практической деятельности человека приводит к необходимости рассмотрения пространств любой размерности n.Целью дипломной работы является рассмотрение методов построения многомерных пространств и некоторых геометрических образов в этих пространствах; приведение примеров применения многомерной геометрии.
Объектом исследования является теория многомерных пространств и их практическая значимость.
Работа состоит из введения, трёх глав, разбитых на параграфы, списка литературы.В первой главе рассматривается историческая справка многомерного пространства, понятие n-мерного пространства на основе аксиоматики Вейля, евклидово векторное пространство, также оповещается об аффинном n-мерном пространстве.
Во второй главе рассказывается о многомерных геометрических образах в n-мерном пространстве.
Третья глава
работы содержит применение многомерной геометрии в различных теориях.
Глава I. Элементы общей теории многомерных пространств
§ 1. Историческая справка
Многомерная геометрия – геометрия пространств размерности, больше трёх. Термин «многомерная геометрия» применяется к тем пространствам, геометрия которых была первоначально развита для случая трёх измерений и только потом обобщена на число измерений n > 3, то есть, прежде всего к евклидову пространству, а также к пространствам Лобачевского, Римана, проективному, аффинному (общие же римановы и другие пространства были определены сразу для n-измерений). Разделения трёх- и многомерной геометрий имеет историческое и учебное значение, так как задачи ставятся и решаются для любого числа измерений, когда и поскольку это осмысленно. Построение геометрии указанных пространств для n-измерений проводится по аналогии со случаем трёх измерений. При этом можно исходить из обобщения непосредственно геометрических оснований 3-мерной геометрии, из той или иной системы её аксиом или из обобщения её аналитической геометрии, перенося её основные выводы со случая трёх координат на произвольное n.
Именно так и начиналось построение n-мерной евклидовой геометрии. В настоящее время предпочитают исходные из понятия векторного пространства.
Исторически представление в более чем 3-мерном пространстве зарождалась постепенно; первоначально – на почве геометрического представления степеней: а2 – «квадрат», а3 – «куб», а4 – «биквадрат», а5 – «кубоквадрат» и т. д. (ещё у Диофанта в 3 в. и далее у ряда средневековых авторов). Мысль в многомерном пространстве выражал И. Кант (1746), а о присоединении к пространству в качестве 4-й координаты времени писал Ж. Д’Аламбер (1764). Построение же евклидовой моногомерной геометрии было осуществлено А. Кэли (1843), Г. Грассманом (1844) и Л. Шлефли (1852). Первоначальные сомнения и мистика, связанные со смешением этих обобщений с физическим пространством, были преодолены, и n-мерное пространство как плодотворное формально-математическое понятие скоро полностью укрепилось в математике.
Многомерные пространства возникли путём обобщения, аналогии с геометрией на плоскости и в трёхмерном пространстве. На плоскости каждая точка задаётся в системе координат двумя числами – координатами этой точки, а в пространстве – тремя координатами. В n-мерном же пространстве, точка задаётся n координатами, то есть записывается в виде A(x1, x2, ..., xn), где x1, x2, ..., xn – произвольные действительные числа (координаты точки А). На плоскости система координат имеет две оси, в пространстве – три, а в n-мерном пространстве система координат содержит n осей, причём каждые две из этих осей перпендикулярны друг другу. Конечно, такие пространства существуют лишь в воображении математиков и тех специалистов из других областей из других областей знания, которые применяют эти математические абстракции. Ведь реальное пространство, в котором мы живём, математически хорошо описывается трёхмерным пространством (евклидовым или римановым, но именно трёхмерным). Увидеть – в буквальном, физическом смысле этого слова – фигуры в четырёхмерном пространстве (а тем более в пространствах большего числа измерений) не в состоянии никто, даже самый гениальный математик; их можно видеть только мысленным взором.
Существуют различные парадоксы четвёртого измерения. Если, например, на плоскости имеется кольцо (оболочка), а внутри – кружок, то как бы мы ни двигали этот кружок по плоскости, вынуть его из этой оболочки, не разрывая её, невозможно. Но стоит только выйти в третье измерение, и кружок легко вынуть из кольца, подняв его вверх, над плоскостью, то, не прорывая оболочку, невозможно вынуть из неё этот шарик. Но если бы существовало четвёртое измерение, то можно было бы «поднять» шарик над трёхмерным пространством в направлении четвёртого измерения, а затем положить его снова в трёхмерное пространство, но уже вне оболочки. И то, что это сделать никому не удаётся, приводят как довод против существования четвёртого измерения. Довод ошибочен, так как в нём спутаны два вопроса.
Первый вопрос: имеется ли в реальном? Ответ на этот вопрос отрицателен.
Второй вопрос: можно ли рассматривать четырёхмерное пространство абстрактно, математически? Ответ утвердителен.
Нет ничего нелогичного или противоречивого в том, чтобы рассматривать четвёрки чисел (x1, x2, x3, x4), исследовать свойства этих «четырёхмерных точек», составлять из них фигуры, доказывать теоремы, постоянно строя таким образом, геометрию четырехмерного (или, вообще n-мерного) пространства. Но математическая н6епротиворечивость n-мерной геометрии ещё недостаточна для суждения о ценности этой теории.
§ 2. Понятие векторного многомерного пространства на основе аксиоматики Вейля.
В векторной аксиоматике понятие вектора является одним из основных (необходимых) понятий. Понятие числа тоже будем считать основным понятием и исходить из того, что теория действительного числа известна. Свойства операций сложения векторов и умножения вектора на действительные числа примем за аксиомы. Тогда можно дать аксиоматическое определение векторного пространства.
Пусть V – некоторое непустое множество, элементы которого будем
называть векторами, и которые могут быть произвольной природы, R –
множество действительных чисел. Введём для векторов операции сложения векторов
и умножения вектора на действительные числа из R такие, чтоа) любым двум
векторам a и b поставлен в соответствие определённый вектор,
называемый суммой и обозначаемый a+b;б) любому вектору a и любому
действительному числу α поставлен в соответствие определённый
вектор, называемый произведением вектора на число и обозначаемый через αа.
И пусть при этом выполняются следующие свойства аксиомы:1. a+b=b+a для
любых векторов a и b из V ;2. (a+b)+с=a+(b+c),
для любых векторов a, b, c ![]() V.3. Существует такой
вектор О
V.3. Существует такой
вектор О ![]() V,
что а+О=а;4. Для любого вектора а
V,
что а+О=а;4. Для любого вектора а ![]() V существует такой вектор – a
V существует такой вектор – a
![]() V ,
что а+(- а)=O;5.
V ,
что а+(- а)=O;5. ![]() для любых чисел
для любых чисел ![]() и
и ![]()
![]() V;6.
V;6. ![]() для любого
числа
для любого
числа ![]()
![]() R и
любых векторов a и b из V;7. 1· а = а для любого
вектора а
R и
любых векторов a и b из V;7. 1· а = а для любого
вектора а ![]() V.
V.
Тогда множество V называется действительным линейным векторным пространством или векторным пространством. Введённое определение не накладывает никаких ограничений на природу элементов множества V, поэтому могут существовать различные векторные пространства.
Примеры: Векторное пространство V1 – множество векторов на прямой; Векторное пространство V2 – множество векторов на плоскости; Векторное пространство V3 – множество векторов пространства трёх измерений; Множество различных многочленов от одной переменной также составляет векторное пространство. «Векторами» являются многочлены. Используя утверждения, что в обычном пространстве трёх измерений существует три линейно независимых вектора, то есть выполняется равенство:
![]() ,
когда
,
когда ![]() ;
;
Любая система, состоящая более, чем из 3-х векторов этого пространства, линейно зависима.
Продолжая строить аксиоматическую теорию векторных пространств, введём следующее определение.
Определение: Векторное пространство V называется n-мерным, если в нём выполняются аксиомы:
9. В векторном пространстве V существуют n линейно независимых векторов.
10. Любая система, состоящая более, чем из n векторов пространства V, линейно зависима.
Число n называется размерностью векторного пространства и обозначается символом dim V , а само пространство будем обозначать символом Vn. Базисом n-мерного векторного пространства Vn называется любая упорядоченная система векторов, таких, что система линейно независима; любой вектор пространства Vn является линейной комбинацией данной системы векторов. Базис не может иметь более трёх векторов и менее чем три вектора. Очевидно, что базис пространства V3 будем называть 3-мерным и обозначать В = (е1, е2, е3), где векторы е1, е2, е3 называются базисными. Из аксиом 9 и 10 следует, что в n-мерном векторном пространстве Vn существует хотя бы один базис, состоящий из n векторов. Можно доказать, что в Vn существует бесчисленное множество базисов и любой из них состоит из n векторов. N-мерный базис будем обозначать В = (е1, е2,…, еn), а векторы е1, е2,…, еn называть базисными. Следствие: Любая система, состоящая более чем из трёх векторов обычного пространства трёх измерений, линейно зависима.
§ 3. Евклидово векторное пространство
Строя аксиоматическую теорию аналитической геометрии на векторной основе, введём следующее определение.
Определение
1: Скалярным произведением на векторном пространстве V
называется операция, которая любой паре векторов a и b
ставит в соответствие некоторое действительное число, обозначаем символом a b и обладающее следующими
свойствами:11. Для любых векторов a, b ![]() V и любого
вектора a b= b а;12. Для любых двух векторов a, b
V и любого
вектора a b= b а;12. Для любых двух векторов a, b ![]() V и любого
числа
V и любого
числа ![]() .13. Для любых трёх векторов a, b, c
.13. Для любых трёх векторов a, b, c ![]() V
V ![]() ;14. Для любого ненулевого вектора а
;14. Для любого ненулевого вектора а ![]() V
aa>0.
V
aa>0.
Определение 2: Векторное пространство Vn, в котором введена операция скалярного произведения векторов, удовлетворяющая аксиомам 11-14, называется евклидовым векторным пространством. Будем обозначать его символом Еn.
На основе определения 1 можно ввести понятие длины вектора и величины угла между векторами.
Число аа называется скалярным квадратом вектора а и обозначается а2.
Из аксиомы 14 следует, что а2>0, следовательно, ![]() - действительное
положительное число. Оно называется длиной или нормой вектора и обозначается:
- действительное
положительное число. Оно называется длиной или нормой вектора и обозначается: ![]()
![]() . Если
. Если ![]() 1, то вектор а
называется единичным.
1, то вектор а
называется единичным.
На основе аксиом 11-14 можно указать следующие утверждения: Для любых векторов a, b1, b2,…, bn выполняется равенство
![]() .
.
![]() , где а – произвольный
вектор;
, где а – произвольный
вектор;
Если ![]() , то
, то ![]() , а если
, а если ![]() , то
, то ![]() ;Если
;Если ![]() , то
, то ![]() .
.
Можно показать, что если ![]() , то
вектор
, то
вектор  является единичным, его
называют ортом вектора а. Он определяет то же направление, что и вектор а.
является единичным, его
называют ортом вектора а. Он определяет то же направление, что и вектор а.
При решении метрических задач, т. е. задач, связанных с измерением длин векторов и величин углов, пользуются ортонормированным базисом.
Определение:
Базис называется ортонормированным, если все его векторы единичные и попарно
ортогональны, т. е. если ![]() и
и ![]() (
(![]() ) при
) при ![]() .
.
Теорема. В евклидовом пространстве Еn существуют ортонормированные базисы.
Действительно, если (а1, а2,…, аn) – ортогональный базис, то можно рассмотреть векторы
 ,
,  ,…,
,…,  .
.
Ясно, что базис (е1, е2,…, еn) ортонормированный, так как его векторы единичные и попарно ортогональны.
Введём обозначения: В=(i, j) или B=(i, j, k) – ортонормированные базисы евклидовых векторных пространств Е2 и Е3 соответственно.
§ 4. Понятие точечно-векторного аффинного n-мерного пространства
В § 2 и § 3 были аксиоматически определены различные векторные пространства: линейные векторные, n-мерные векторные, евклидовы векторные. Но для построения геометрии, то есть для рассмотрения различных геометрических фигур, одних векторов недостаточно, нужны ещё точки.
Аксиоматизируя построение вектора по двум точкам, введём следующее определение.
Определение. Аффинным пространством называют некоторое множество А* элементов произвольной природы, называемых точками, для которого задано
а) некоторое векторное пространство V;
б) отображение, которое любым двум точкам А и В![]() А* ставит в соответствие некоторый вектор из V,
обозначаемый АВ.
А* ставит в соответствие некоторый вектор из V,
обозначаемый АВ.
При этом требуется выполнение следующих аксиом:
15. Для любой точки А![]() А* и любого вектора А из V
существует единственная точка В
А* и любого вектора А из V
существует единственная точка В![]() А* и любого вектора а
А* и любого вектора а![]() V существует
единственная точка В
V существует
единственная точка В![]() А*, такая что АВ=а.
А*, такая что АВ=а.
16. Для любых трёх точек А, В, С![]() A* имеет место равенство АВ+ВС=АС.
A* имеет место равенство АВ+ВС=АС.
Аксиома 15 называется аксиомой откладывания вектора от точки, а аксиома 16 – аксиомой треугольника, из которой следует правило треугольника и правило параллелограмма сложения векторов.
Размерность пространства V называется размерностью соответствующего аффинного пространства А* и обозначается символом А*n.
Отметим некоторые важные следствия из аксиом 15-16.
При любом выборе точки А вектор АА нулевой.
Если АВ=0, то точки А и В совпадают.
Для любых точек А и В АВ = - ВА.
Если АВ=СD, то АС=ВD.
Для произвольных точек А1, А2,…, Аn выполняется равенство А1А2+ А2А3+ Аn-1Аn= А1Аn (правило многоугольника сложения векторов).
Пространство А*n содержит бесчисленное множество точек.На основе аксиом 1-10 и 15-16 аффинной геометрии нельзя ввести понятий длин отрезков и величин (мер) углов. Эти понятия можно ввести, используя скалярное произведение векторов.
Как известно, введение в Vn скалярного произведения векторов приводит к евклидову векторному пространству Еn.
Определение. Аффинное пространство Аn*, в котором соответствующее ему векторное пространство Vn превращено в евклидово векторное пространство Еn, называется евклидовым n-мерным пространством.
Для этого пространства введём обозначение Еn. Согласно определению ясно, что всякое аффинное пространство Аn* можно превратить в евклидово пространство Еn, задавая на векторном пространстве Vn скалярное произведение векторов, удовлетворяющее аксиомам 11-14 (§ 3).
Таким образом, в Еn выполняются аксиомы 1-16.
На основе аксиом евклидова пространства строится евклидова геометрия.
В евклидовой геометрии, очевидно, справедлива вся изложенная выше теория аффинной геометрии. Но пространство Еn обладает метрическими свойствами, которые следуют из аксиом скалярного произведения векторов и связаны с измерением длин отрезков и мер углов. Поэтому евклидову геометрию называют ещё метрической геометрией.
Метрические аксиомы позволяют установить метрику евклидова пространства, т. е. расстояния между его точками. Определим сначала модуль |a| вектора а как неотрицательный корень из его квадрата, т. е.
![]() (4.1)
(4.1)
Векторы, модуль которых равен 1, будем называть единичными векторами;
единичный вектор ![]() будем обозначать
а0.
будем обозначать
а0.
Будем считать расстоянием между точками А и В модуль вектора АВ; будем обозначать это расстоянием АВ.
Таким образом, расстояние АВ между точками А(х) и В(y) определяется соотношением
![]() (4.2)
(4.2)
Из определения расстояния следует, что
Расстояние симметрично, т. е.
АВ=ВА (4.3)
Расстояние позитивно, т. е. (4.4) AB ≥ 0, причём знак равно имеет место только при совпадении точек А и В.Покажем, что для расстояний между точками евклидова пространства помимо свойств 1 и 2 выполняется также «неравенство треугольника».расстояние между всякими двумя точками не более суммы расстояний между этими точками и третьей точкой, т. е.
АС ≤ АВ + ВС (4.5)
Множество точек, для всяких двух точек А и В которого определено число АВ, удовлетворяющего условиям 1-3, называется метрическим пространством. Для доказательства неравенства треугольника докажем так называемое неравенство Коши
![]() (4.6)
(4.6)
Скалярный квадрат вектора a – tb неотрицателен при любом вещественном t
![]() , т. е.
, т. е. ![]() .
.
В случае b = 0 обе части неравенства (4.6) равны 0, т. е. неравенство выполняется автоматически.
Если ![]() , получим
, получим  .
.
Тогда неравенство примет вид
 , т. е.
, т. е. ![]() ,
,
что равносильно неравенству (4.6). Рассмотрим три точки А(х),
В(у) и С(z). Тогда 
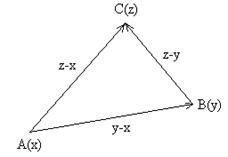 Рис.
1
Рис.
1
Но в силу неравенства Коши ![]() . Поэтому
. Поэтому ![]() , откуда получаем неравенство
(4.5).
, откуда получаем неравенство
(4.5).
Глава II. Многомерные геометрические образы в n-мерных пространствах
§ 5. Четырёхмерное пространство. Определение и его исследование
При построении геометрии на прямой, на плоскости и в трёхмерном пространстве есть две возможности: либо излагать материал с помощью наглядных представлений (этот способ характерен для школьного курса, поэтому трудно себе представить учебник геометрии без чертежей), либо – и эту возможность даёт нам метод координат – излагать его чисто аналитически, назвав, например, точкой плоскости в курсе планиметрии пару чисел (координаты этой точки), а точкой пространства – тройку чисел.При введении четырёхмерного пространства первая возможность у нас отсутствует. Мы не можем непосредственно пользоваться наглядными геометрическими представлениями – ведь окружающее нас пространство имеет всего три измерения. Однако вторая версия для нас не закрыта. В самом деле, мы определяем точку прямой как число, точку плоскости как пару чисел, точку трёхмерного пространства как тройку чисел. Поэтому совершенно естественно построить геометрию четырёхмерного пространства, определив точку этого воображаемого пространства как четвёрку чисел. Под геометрическими фигурами в таком пространстве нужно будет понимать некоторые множества точек (как, впрочем, и в случае обычной геометрии). Перейдём теперь к точным определениям.
Координатные оси и плоскости
Определение. Точкой четырёхмерного пространства называется упорядоченная четвёрка чисел (x, y, z, t).
Что считать в пространстве четырёх измерений координатными осями и сколько их?
Чтобы ответить на этот вопрос, вернёмся на время к плоскости и трёхмерному пространству.
На плоскости (т. е. в пространстве двух измерений) координатные оси – это множества точек, у которых одна из координат может иметь одно числовое значение, а вторая равна нулю. Так, ось абсцисс – это множество точек вида (х, 0), где х – любое число. Например, на оси абсцисс лежат точки (1, 0), (-3, 0), а точка (1/5, 2) не лежит на оси абсцисс.
 Рис.
2
Рис.
2
Ось ординат плоскости – это множество точек вида (0, у), где у – любое число. В трёхмерном пространстве есть три оси: ось х – это множество точек вида (х, 0, 0), где х – любое число; ось у – множество точек вида (0, у, 0), где у – любое число; ось z – множество точек вида (0, 0, z), где z – любое число.В четырёхмерном пространстве, состоящем из всех точек вида (x, y, z, t), где x, y, z, t – любые числа, естественно считать координатными осями такие множества точек, у которых одна из координат принимает любые числовые значения, а остальные равны нулю. Тогда ясно, что в четырёхмерном пространстве есть четыре координатные оси: ось х – это множество точек вида (х, 0, 0, 0), где х – любое число; ось у – множество точек вида (0, у, 0, 0), где у – любое число; ось z – множество точек вида (0, 0, z, 0), где z – любое число, где у – любое число; ось t – множество точек вида (0, 0, 0, t), где t – любое число. В трёхмерном пространстве, кроме координатных осей, имеются ещё координатные плоскости. Это – плоскости, проходящие через две какие-либо две координатные оси. Например, плоскость yz – это плоскость, проходящая через ось y и ось z.
Всего в трёхмерном пространстве есть три координатные плоскости:
плоскость xy – множество точек вида (х, у, 0), где х и у – любые числа;
плоскость yz – множество точек вида (х, 0, z), где х и z – любые числа;
плоскость yz – множество точек вида (0, у, z), где y и z – любые числа.
Естественно, и в четырёхмерном пространстве называть координатными плоскостями множество точек, у которых какие-либо две из четырёх координат принимают любые числовые значения, а остальные две равны нулю. Например, множество точек вида (x, 0, z, 0) мы будем называть координатной плоскостью xz четырёхмерного пространства. Сколько же всего таких плоскостей?
Выпишем их:
плоскость ху – множество точек, вида (х, у, 0, 0),
плоскость хz – множество точек, вида (х, 0, z, 0),
плоскость хt – множество точек, вида (х, 0, 0, t),
плоскость уz – множество точек, вида (0, у, z, 0),
плоскость уt – множество точек, вида (0, у, 0, t),
плоскость zt – множество точек, вида (0, 0, z, t).
Для каждой из этих плоскостей переменные координаты могут принимать любые числовые значения, в том числе и нулевое. Например, точка (5, 0, 0, 0) принадлежит плоскости xy и плоскости xt. Тогда легко видеть, что, например, плоскость yz «проходит» через ось у в том смысле, что каждая точка этой оси принадлежит этой плоскости. Действительно, любая точка на оси у, т. е. точка вида (0, у, 0, 0), принадлежит множеству точек вида (0, y, z, 0), т. е. плоскости yz.
Итак, в четырёхмерном пространстве существуют множества точек, аналогичные координатным плоскостям трёхмерного пространства. Их шесть. Каждое из них состоит из точек, у которых, как и у точек координатных плоскостей трёхмерного пространства, две какие-либо координаты могут принимать любые числовые значения, а остальные две равны нулю. Каждая из этих координатных плоскостей «проходит» через две координатные оси: например, плоскость yz проходит через ось у и ось z. С другой стороны, через каждую ось проходят три координатные плоскости. Так, через ось х проходят плоскости xy, xz, xt. Будем говорить, что ось х является пересечением этих плоскостей. Все шесть координатных плоскостей содержат одну общую точку. Это точка (0, 0, 0, 0) – начало координат.
Получаем аналогичную тому, что имеется в трёхмерном пространстве. Представим схематический рисунок, который поможет создать некоторый наглядный образ расположения координатных плоскостей и осей четырёхмерного пространства.
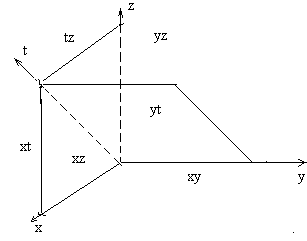
Рис. 3
На рисунке оси координат изображены прямыми, показаны координатные плоскости, все точно также, как и для трёхмерного пространства.
Однако, в четырёхмерном пространстве есть ещё множества точек, которые можно называть координатными плоскостями. На прямой имеется только начало координат, на плоскости есть и начало координат, и оси в трёхмерном пространстве, кроме начала и осей, появляются ещё и координатные плоскости. Естественно, что в четырёхмерном пространстве появляются новые множества, которые будем называть трёхмерными координатными плоскостями.
Это – множества, состоящие из всех точек, у которых какие-либо три из четырёх координат принимают всевозможные числовые значения, а четвёртая равна нулю.
Таково, например, множество, имеющее вид (х, 0, z, t), где x, z, t принимают всевозможные значения. Это множество будем называть трёхмерной координатной плоскостью xzt. Легко понять, что в четырёхмерном пространстве существует четыре координатные трёхмерные плоскости:
плоскость xyz – множество точек вида (x, y, z, 0),
плоскость xyt - множество точек вида (x, y, 0, t),
плоскость xzt - множество точек вида (x, 0, z, t),
плоскость yzt - множество точек вида (0, y, z, t).
Каждая из трёхмерных координатных плоскостей «проходит» через начало координат и что каждая из этих плоскостей «проходит» через три координатные оси (слово «проходит» мы здесь употребляем в том смысле, что начало координат и каждая из точек осей принадлежат плоскости). Например, трёхмерная плоскость xyt проходит через оси x, y, t.
Аналогично, можно сказать, что каждая из двумерных плоскостей является пересечением двух трёхмерных плоскостей.
Например, плоскость ху является пересечением трёхмерных плоскостей xyz и xyt, т. е. состоит из всех точек, принадлежащих одновременно и тому и другому множеству.
Четырёхмерный куб
Определение сферы и куба
Перейдём теперь к рассмотрению геометрических фигур в четырёхмерном пространстве. Под геометрической фигурой (как и в случае обычной геометрии) будем понимать некоторое множество точек.
Возьмем, например, определение сферы: сфера есть множество точек, удалённых от некоторой точки на одно и то же расстояние.
Это определение уже можно использовать, чтобы по аналогии определить сферу в четырёхмерном пространстве: что такое точка, мы знаем; что такое расстояние между точками, тоже знаем. Мы и примем определение, переведя его на язык чисел (для простоты, как и в случае трёхмерного пространства, возьмём сферу с центром в начале координат).
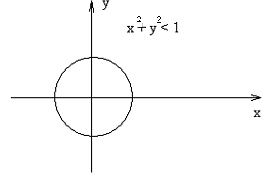
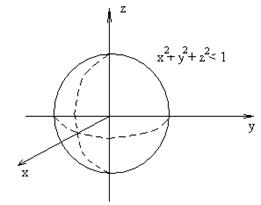
2-мерный шар (круг) 3-мерный шар
рис. 4
Определение. Множество точек (x, y, z, t), удовлетворяющих соотношению
![]() (5. 1)
(5. 1)
называется четырёхмерной сферой с центром в начале координат и радиусом R.
Если рассматривать не сферу, а шар, то указанное равенство надо заменить неравенством
![]() (5. 2)
(5. 2)
Это замечание относится также к двумерному и к трёхмерному случаям.
Расскажем теперь немного о четырёхмерном кубе. Судя по названию, его фигура, аналогичная обыкновенному, хорошо знакомому трёхмерному кубу.
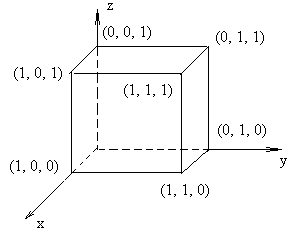
3-мерный куб
Рис. 5
На плоскости тоже есть фигура, аналогичная кубу, - это квадрат.
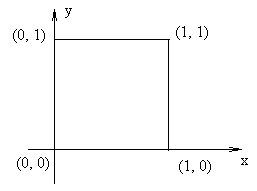
2-мерный куб (квадрат)
Рис. 6
Кубом называется множество точек (x, y, z), удовлетворяющих соотношениям:
 (5. 3)
(5. 3)
Это «арифметическое» определение куба не нуждается ни в каком чертеже. Однако оно полностью соответствует геометрическому определению куба.
В пространстве есть и другие кубы. Например, множество точек,
определяемых соотношениями ![]()
![]()
![]() тоже является кубом. Этот
куб хорошо расположен относительно координатных осей: начало координат является
его центром, координатные оси и координатные плоскости – осями и плоскостями
симметрии. Однако для наших целей удобен именно куб, определяемый соотношениями
(5. 3). Такой куб мы будем иногда называть единичным, чтобы отличить его от
других кубов.
тоже является кубом. Этот
куб хорошо расположен относительно координатных осей: начало координат является
его центром, координатные оси и координатные плоскости – осями и плоскостями
симметрии. Однако для наших целей удобен именно куб, определяемый соотношениями
(5. 3). Такой куб мы будем иногда называть единичным, чтобы отличить его от
других кубов.
одномерный куб (отрезок)
рис. 7
Для квадрата тоже можно дать арифметическое определение: квадратом называется множество точек (х, у), удовлетворяющих соотношениям:
![]()
![]()
Сравнивая эти два определения, легко понять, что квадрат действительно является, как говорят, двумерным аналогом куба. Будем называть иногда квадрат «двумерным кубом».
Можно также рассмотреть аналог этих фигур и в пространстве одного измерения – на прямой. Получим множество точек х прямой, удовлетворяющих соотношениям:
![]()
Ясно, что таким «одномерным кубом» является отрезок.
Определение. Четырёхмерным кубом называется множество точек (x, y, z, t), удовлетворяющих соотношениям
![]()
![]()
![]()
![]()
Устройство четырёхмерного куба
Рассмотрим по порядку «кубы» различных размерностей, т. е. отрезок, квадрат и обычный куб.
Отрезок, определяемый соотношениями ![]() является
очень простой фигурой. Про него можно сказать, что его граница состоит из двух
точек: 0 и 1. Остальные точки отрезка будем называть внутренними.
является
очень простой фигурой. Про него можно сказать, что его граница состоит из двух
точек: 0 и 1. Остальные точки отрезка будем называть внутренними.
Граница квадрата состоит из четырёх точек (вершин) и четырёх отрезков. Таким образом, квадрат имеет на границе элементы двух типов: точки и отрезки. Граница трёхмерного куба содержит элементы трёх типов: вершины – их 8, рёбра (отрезки) – их 12 и границ (квадраты) – их 6.
Запишем эти данные в виде таблицы:
|
Состав границы Фигура |
Точек (вершин) |
Отрезок (сторон, рёбер) |
Квадратов (граней) |
| Отрезок | 2 | - | - |
| Квадрат | 4 | 4 | - |
| Куб | 8 | 12 | 6 |
Эту таблицу можно переписать короче, если условиться писать вместо названия фигуры число n, равное её размерности: для отрезка n = 1; для квадрата n = 2; для куба n = 3. Вместо названия элемента границы тоже можно писать размерность этого элемента: для грани n = 2, для ребра n = 1.
При этом точку (вершину) удобно считать элементом нулевой размерности (n = 0). Тогда предыдущая таблица примет следующий вид:
|
размерность границы размерность куба |
0 | 1 | 2 |
| 1 | 2 | - | - |
| 2 | 4 | 4 | - |
| 3 | 8 | 12 | 6 |
| 4 | 16 | 32 | 24 |
Цель – заполнить четвёртую строку этой таблицы.
Граница отрезка ![]() состоит
из двух точек: х = 0 и х =1. Граница квадрата
состоит
из двух точек: х = 0 и х =1. Граница квадрата ![]()
![]() содержит 4 вершины:
содержит 4 вершины:
х = 0, у = 0; х = 0, у = 1; х = 0, у = 1; х = 1, у = 1, т. е. точки (0, 0), (0, 1), (1, 0), (1, 1).
Куб ![]()
![]() ,
, ![]() , содержит восемь вершин.
Каждая из этих вершин есть точка (x, y, z), в которой x, y, z заменяются либо нулём, либо единицей. Получаем следующие 8
точек:
, содержит восемь вершин.
Каждая из этих вершин есть точка (x, y, z), в которой x, y, z заменяются либо нулём, либо единицей. Получаем следующие 8
точек:
(0, 0, 0), (0, 0, 1), (0, 1, 0), (1, 0, 0), (0, 1, 1), (1, 1, 0), (1, 0, 1), (1, 1, 1).
Вершинами четырёхмерного куба: ![]()
![]() ,
, ![]() ,
, ![]() называются точки (x, y, z,
t), у которых x, y, z, t
заменяются либо нулём, либо единицей. Таких вершин 16.
называются точки (x, y, z,
t), у которых x, y, z, t
заменяются либо нулём, либо единицей. Таких вершин 16.
Рис. 8
 Тогда рёбрами
(трёхмерного) куба являются стороны.
Тогда рёбрами
(трёхмерного) куба являются стороны.
Рис. 9
х = 0, у = 0, ![]() (ребро
АА1)
(ребро
АА1)
![]() , у = 0, z = 1 (ребро АB1)
, у = 0, z = 1 (ребро АB1)
х = 1, ![]() , z = 1 (ребро B1А1)
и т. д.
, z = 1 (ребро B1А1)
и т. д.
Определение. Рёбрами четырёхмерного куба называется множество точек, для которых все координаты, кроме одной, постоянны (равны 0, либо 1), а четвёртая принимает все возможные значения от 0 до 1.
Прежде всего будем различать четыре группы рёбер: для первой пусть
переменной координатой является х (![]() ),
а y, z, t принимают постоянные значения 0 и 1 во всех
комбинациях. Так как существует 8 различных троек из нуля и единицы. Поэтому
рёбер первой группы – 8. Рёбер второй группы, для которых переменной является
не х, а у, тоже 8. Таким образом, ясно, что всего у
четырёхмерного куба 32 ребра. Кроме рёбер у куба есть грани, которые, в свою
очередь разделяются на двумерные и трёхмерные грани четырёхмерного куба. У
четырёхмерного куба 24 двумерных грани и 8 – трёхмерных (они изображены
параллелепипедами (рис. 10)).
),
а y, z, t принимают постоянные значения 0 и 1 во всех
комбинациях. Так как существует 8 различных троек из нуля и единицы. Поэтому
рёбер первой группы – 8. Рёбер второй группы, для которых переменной является
не х, а у, тоже 8. Таким образом, ясно, что всего у
четырёхмерного куба 32 ребра. Кроме рёбер у куба есть грани, которые, в свою
очередь разделяются на двумерные и трёхмерные грани четырёхмерного куба. У
четырёхмерного куба 24 двумерных грани и 8 – трёхмерных (они изображены
параллелепипедами (рис. 10)).
4 - мерный куб Рис. 10
§ 6. Геометрия k-плоскостей в аффинном и евклидовом пространствах
Определение k-плоскости
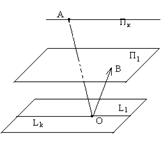
Пусть в n-мерном аффинном пространстве Un зафиксирована произвольная точка А, и в соответствующем линейном пространстве Ln зафиксировано произвольное k-мерное подпространство Lk.
Определение. Множество всех точек М аффинного
пространства, для которых АМ ![]() Lk,
называют k-мерной плоскостью, проходящей через точку А в
направлении подпространством Lk.
Lk,
называют k-мерной плоскостью, проходящей через точку А в
направлении подпространством Lk.
Рис. 11, где k = 2
Говорят также, что Lk есть направляющее подпространство этой плоскости. Очевидно, что каждая плоскость определяет однозначно своё направляющее пространство.
Точку М называют текущей точкой плоскости. На рисунке показаны три положения М1, М2, М3 текущей точки М.
Частные случаи k-плоскостей
Если k = 0, то плоскость состоит из одной точки А. Поэтому каждую точку аффинного пространства можно рассматривать как нуль-мерную плоскость.
Одномерная плоскость называется прямой линией.
Плоскость размерности n – 1 называется гиперплоскостью.
При k = n плоскость совпадает со всем пространством Un.
В определении плоскости выделена точка А. Докажем, что в действительности все точки плоскости равноправны.
Обозначим плоскость через Пk
и зафиксируем произвольную точку В ![]() .
Надо доказать, что точка М принадлежит плоскости Пk
тогда и только тогда, когда
.
Надо доказать, что точка М принадлежит плоскости Пk
тогда и только тогда, когда ![]() (т. е.
что любая точка М может играть роль А).
(т. е.
что любая точка М может играть роль А).
Пусть ![]() . По определению
плоскости
. По определению
плоскости ![]() . Отсюда и по определению
подпространства
. Отсюда и по определению
подпространства ![]() , поэтому
, поэтому ![]() . Обратно, если
. Обратно, если ![]() , то
, то ![]() следовательно,
следовательно, ![]() .
.

Рис. 12
Теорема. Всякая k-мерная плоскость в аффинном пространстве сама является k-мерным аффинным пространством.
Доказательство. Пусть дано аффинное пространство U,
которому соответствует линейное пространство L, пусть Пk – плоскость, проходящая через точку А в направлении
подпространства Lk.
Возьмём в плоскости Пk две произвольные
точки M, N . По
определению аффинного пространства им соответствует вектор ![]() . По определению плоскости
векторы АМ и АN принадлежат
подпространству Lk.
. По определению плоскости
векторы АМ и АN принадлежат
подпространству Lk.
Следовательно, ![]() . Таким
образом, каждой упорядоченной паре точек М, N плоскости
Пk, поставим в соответствие вектор MN из k-мерного пространства Lk. При этом
соблюдаются для Пk аксиомы,
вытекающие из определения k-мерной плоскости и для
всего аффинного пространства U. Теорема доказана.
. Таким
образом, каждой упорядоченной паре точек М, N плоскости
Пk, поставим в соответствие вектор MN из k-мерного пространства Lk. При этом
соблюдаются для Пk аксиомы,
вытекающие из определения k-мерной плоскости и для
всего аффинного пространства U. Теорема доказана.
Замечание. Если плоскость проходит через начало аффинной системы координат в направлении подпространства Lk, то совокупность радиус-векторов её точек образует подпространство, по определению совпадающее с подпространством Lk.
Пусть в аффинном пространстве U даны точки А0, А1,…, Аk (в числе k + 1). Эти точки находятся в общем положении, если они не принадлежат ни одной (k –1)-мерной плоскости .
Проверим, что точки А0, А1,…, Аk находятся в общем положении тогда и только тогда, когда векторы А0А1,…, А0Аk линейно независимы (рис. 13), причём безразлично, какую из точек брать в качестве А0 (то есть за начало векторов, идущих из неё в другие точки).
Рис. 13
Из сказанного в этом пункте и из определения плоскости следует, что через систему точек А0, А1,…, Аk, находящихся в общем положении, проходит k-мерная плоскость и притом только одна.
Предположим, что в пространстве Un зафиксирована какая-нибудь аффинная система координат с началом О и базисом е1, е2, …, еn. Рассмотрим плоскость Пk, проходящую через точку А в направлении подпространства Lk.
Будем считать, что точка А имеет координаты р1, р2, …, рn и что Lk задаётся как независимая система векторов q1, q2, …, qk. Тогда радиус-вектор ОМ текущей точки плоскости можно записать в виде
![]() (6. 1)
(6. 1)
где параметры τ1, τ2,
…, τk независимо друг от друга
пробегают всевозможные числовые значения, а вектор ![]() (рис.
14)
(рис.
14)
 Рис. 14
Рис. 14
Разложим вектор q1, q2, …, qk по базису е1, е2, …, еn:
![]()
Координаты текущей точки М обозначим, как обычно, через (x1, x2, …, xn) и запишем векторное равенство в координатах. В результате получим n числовых равенств.
 (6. 2)
(6. 2)
Эти равенства называются параметрическими уравнениями плоскости Пk.
Пример. Пространство, изучаемое в стереометрии, является трёхмерным аффинным пространством. В нём одномерные и двумерные плоскости совпадают соответственно с прямыми линиями и плоскостями, понимаемыми в элементарно-геометрическом смысле. В отличие от пространства, изучаемого в элементарной геометрии, в аффинном пространстве не определены метрические понятия: расстояния между точками и длины линий, площади и объёмы фигур, углы и перпендикулярность. При исследовании фигур в аффинном пространстве изучаются лишь те геометрические свойства, которые не зависят от метрических понятий.
2. Уравнения k-плоскости по k+1 точкам
Если заданы k+1 точек А0(х0), А1(х1), …, Аn(хn) и векторы А0Аа = ха – х0 независимы, то эти точки определяют единственную k – плоскость, проходящую через них: в этом случае за направляющие векторы этой плоскости можно принять векторы А0Аа и векторное уравнение k-плоскости можно записать в виде
![]() (6. 3)
(6. 3)
Будем называть k-плоскость, определяемую точками А0(х0), А1(х1), …, Аn(хn), k-плоскостью А0, А1, …, Аk.
Случай k = n-1
В дальнейшем будем часто иметь дело с k-поверхностями и k-плоскостями при k = n – 1. Говоря, «поверхность n-пространства» и «плоскость n-пространства», но иметь в виду (n – 1)-поверхность и (n – 1)-плоскость этого пространства. Часто поверхность и плоскость называется соответственно гиперповерхностью и гиперплоскостью.
Поверхность можно задать одним координатным уравнением
![]() (6. 4)
(6. 4)
если координаты xi, удовлетворяющие этому уравнению, можно представить как функции n – 1 параметров t1, t2, …, tn-1, то получим
F(x) = 0. (6. 5)
3. Взаимное расположение плоскостей
3. 1 Пересекающиеся плоскости
Во всём этом пункте размерности плоскостей и подпространств обозначены индексами снизу. Пусть две плоскости Пk и Пl пересекаются, то их пересечением является некоторая плоскость Пm.
 k
= l = 2, m = 1 Рис.
15
k
= l = 2, m = 1 Рис.
15
Замечание 1. Не исключена возможность, что Пm состоит из одной точки (m = 0). Это видно на примере двух пересекающихся прямых или прямой и плоскости (рис. 16).
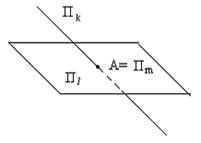
Рис. 16
В общем случае по одной точке могут пересекаться две плоскости, сумма разностей которых не превышает размерности пространства, например, двумерные плоскости в четырёхмерном пространстве.
Замечание 2. Не исключено и другое, когда одна из двух плоскостей
целиком принадлежит другой. Например, ![]() ,
тогда
,
тогда ![]() (рис. 17)
(рис. 17)
 k =
m = 1, l = 2
k =
m = 1, l = 2
Рис. 17
2) Если плоскости Пk и Пl пересекаются по плоскости Пm, то существует единственная плоскость Пr, размерности r = k + l – m, содержащая Пk и Пl, причём ни в какой плоскости меньшей размерности Пk и Пl не могут одновременно поместиться. Направляющее подпространство Lr плоскости Пr является суммой направляющих подпространств Lk и Ll. Эта сумма является прямой суммой тогда и только тогда, когда Пk и Пl пересекаются по одной точке (m = 0, см. рис. 18).
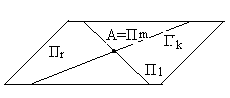
Рис. 18
В частном случае, когда n = k + l – m, роль плоскости Пr выполняет всё пространство Un (при r = n = 3 см. рис. 15).
3) Если пересекающиеся плоскости Пk
и Пl содержатся в какой-нибудь
плоскости Пr, то размерность их
пересечения ![]() . В частности,
. В частности, ![]() для любых двух
непересекающихся плоскостей из Un.
для любых двух
непересекающихся плоскостей из Un.
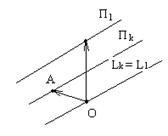
4) Если плоскости Пk и Пl проходят через точку А в направлении подпространств Lk и Ll соответственно и если Lk содержится в Ll, то плоскость Пk содержится в плоскости Пl. Если при этом k = l, то Пk совпадает с Пl (также и Lk совпадает с Ll).
Параллельные плоскости
Пусть теперь плоскость Пk
определяется точкой А и подпространством Lk, а плоскость Пl
– точкой В и подпространством Ll. Будем считать, что ![]() .
.
Определение: Плоскость Пk
параллельна плоскости Пl, если ![]() .
.
В этом случае плоскость Пl параллельна плоскости Пk.
Замечание 1. Согласно этому определению включение ![]() является частным случаем
параллельности.
является частным случаем
параллельности.
Замечание 2. Если Пk параллельна Пl, причём k = l, то Lk совпадает с Ll.
Замечание 3. Убедимся, что при n = 3 частные случаи k = l = 1,
k = l = 2 и k =1, l = 2 согласуются с понятием параллельности прямых и плоскостей, известным из элементарной геометрии (рис. 19)
а) б) в)
Рис. 19
Пусть в произвольной аффинной системе координат две плоскости П и Пl одинаковой размерности заданы системами линейных уравнений. Пользуясь определением параллельности, нетрудно установить следующее утверждение.
Утверждение. Для того, чтобы П и П’ были параллельными, необходимо и достаточно, чтобы соответствующие однородные системы уравнений были эквивалентны.
В частности, две гиперплоскости параллельны тогда и только тогда, когда в одних и тех же координатах они задаются уравнениями
![]() и (6. 6)
и (6. 6)
![]() (6. 7)
(6. 7)
с пропорциональными коэффициентами при переменных:
![]() .
.
Теорема 1. Пусть в аффинном пространстве Un даны плоскость Пk и точка В. Тогда существует единственная
плоскость ![]() размерности k, проходящая
через точку В параллельно Пk. Если
размерности k, проходящая
через точку В параллельно Пk. Если ![]() , то
, то ![]() совпадает с Пk; если точка В расположена вне Пk, то плоскости Пk
и
совпадает с Пk; если точка В расположена вне Пk, то плоскости Пk
и ![]() не пересекаются.
не пересекаются.
Скрещивающиеся плоскости
Определение. Две плоскости называются скрещивающимися, если они не пересекаются и не параллельны.
Известно, что в трёхмерном пространстве U3 две прямые линии, т. е. одномерные плоскости, могут скрещиваться, тогда как прямая линия и двумерная плоскость в U3 скрещиваться не могут. С повышением размерности пространства оно становится более просторным, в результате чего появляется возможность строить в нём скрещивающиеся плоскости разных размерностей, а не только одномерные. Ниже сформулирована теорема 2, содержание которой можно рассматривать как общий приём построения скрещивающихся плоскостей. Именно, пусть в аффинном пространстве Un дана плоскость Пl (l < n). Возьмём произвольную плоскость Пk так, чтобы Пk и Пl не были параллельны и пересекались; плоскость, по которой они пересекаются, обозначим через Пm. Пусть Пr - плоскость наименьшей размерности, содержащая Пk и Пl. Мы знаем, что r = k + l – m.
Теорема 2. Если ![]() , то
всякая k-мерная плоскость, которая параллельна Пk и не лежит в Пr,
скрещивается с Пl.
, то
всякая k-мерная плоскость, которая параллельна Пk и не лежит в Пr,
скрещивается с Пl.
Следствие. Если целые числа k, l, m, n удовлетворяют неравенствам
![]() ,
, ![]() ,
, ![]() , то в Un найдутся скрещивающиеся плоскости Пk и Пl с
направляющими подпространствами Lk и Ll, пересечение которых
, то в Un найдутся скрещивающиеся плоскости Пk и Пl с
направляющими подпространствами Lk и Ll, пересечение которых ![]() имеет
размерность m.
имеет
размерность m.
Доказательство теоремы 2. Так как ![]() ,
то плоскость Пr не исчерпывает собой
всего пространства Un.
Это позволяет взять (с большим произволом) точку С, не лежащую в Пr. Обозначим через
,
то плоскость Пr не исчерпывает собой
всего пространства Un.
Это позволяет взять (с большим произволом) точку С, не лежащую в Пr. Обозначим через ![]() плоскость
размерности k, проходящую через точку С, параллельно Пk. Ясно, что
плоскость
размерности k, проходящую через точку С, параллельно Пk. Ясно, что ![]() не
содержится в Пr и что, выбирая
по-разному точку С, мы можем получить любую k-мерную
плоскость, удовлетворяющую условию теоремы. (См. рис. 14, на котором k = l = 2, r = 2, n = 4, и трёхмерные
плоскости условно изображены в виде параллелепипеда).
не
содержится в Пr и что, выбирая
по-разному точку С, мы можем получить любую k-мерную
плоскость, удовлетворяющую условию теоремы. (См. рис. 14, на котором k = l = 2, r = 2, n = 4, и трёхмерные
плоскости условно изображены в виде параллелепипеда).
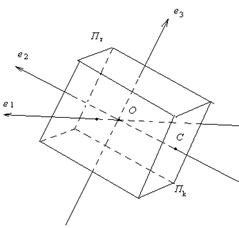
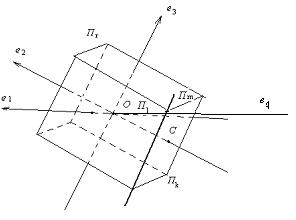
Рис. 20
Докажем, что плоскости Пl
и ![]() скрещиваются. Заметим, что
плоскость
скрещиваются. Заметим, что
плоскость ![]() не параллельна Пl, так как в противном случае или
не параллельна Пl, так как в противном случае или ![]() , или
, или ![]() , что противоречит условию
расположения плоскостей Пk и Пl.
, что противоречит условию
расположения плоскостей Пk и Пl.
Теперь докажем, что ![]() и Пl не пересекаются. Проведём через точку С
вспомогательную r-мерную плоскость
и Пl не пересекаются. Проведём через точку С
вспомогательную r-мерную плоскость ![]() , параллельную Пr. Тогда
, параллельную Пr. Тогда ![]() и
поэтому Пk не
может пересечь Пl ибо
в противном случае точка их пересечения
и
поэтому Пk не
может пересечь Пl ибо
в противном случае точка их пересечения ![]() принадлежала
бы параллельным плоскостям Пr и
принадлежала
бы параллельным плоскостям Пr и ![]() . Следовательно,
скрещивается с Пl. Теорема 2
доказана.
. Следовательно,
скрещивается с Пl. Теорема 2
доказана.
Пусть в n-мерном аффинном пространстве Un даны скрещивающиеся плоскости Пk и Пl с направляющими подпространствами Lk и Ll, причём
![]() ,
, ![]() .
.
Теорема 3. Существует единственная плоскость Пr+1 размерности ![]() ,
содержащая плоскости Пk и Пl.
,
содержащая плоскости Пk и Пl.
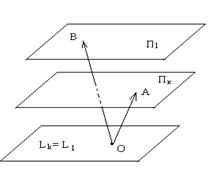
Доказательство. Возьмём произвольную точку ![]() и зафиксируем произвольную
точку
и зафиксируем произвольную
точку ![]() ; обозначим через
; обозначим через ![]() линейную оболочку вектора
линейную оболочку вектора ![]() (рис. 16).
Допустим, что существует какая-то плоскость
(рис. 16).
Допустим, что существует какая-то плоскость ![]() ,
содержащая Пk и Пl; пусть
,
содержащая Пk и Пl; пусть ![]() - её
направляющее подпространство. Очевидно, что
- её
направляющее подпространство. Очевидно, что ![]() должно
содержать Lk, Ll и
должно
содержать Lk, Ll и ![]() ,
а следовательно, и сумму этих подпространств. Обозначим эту сумму через Lr+1:
,
а следовательно, и сумму этих подпространств. Обозначим эту сумму через Lr+1:
![]()
Обратно, если ![]() - любое подпространство,
включающее Lr+1,
то
- любое подпространство,
включающее Lr+1,
то ![]() , проходящая через точку А
в направлении
, проходящая через точку А
в направлении ![]() , будет содержать Пk и Пl. В
самом деле, так как
, будет содержать Пk и Пl. В
самом деле, так как ![]() и
и![]() ,
то
,
то![]() ; так как
; так как ![]() , то
, то ![]() , так как
, так как ![]() и
и ![]() , то
, то ![]() .
.
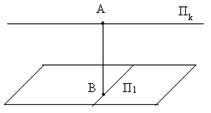

Рис. 21
Получим среди всех плоскостей ![]() искомую плоскость Пr+1 минимальной размерности r
+ 1 в том единственном случае, когда в качестве
искомую плоскость Пr+1 минимальной размерности r
+ 1 в том единственном случае, когда в качестве ![]() берётся
Lr+1. Подсчитаем
r + 1. С этой целью рассмотрим
берётся
Lr+1. Подсчитаем
r + 1. С этой целью рассмотрим ![]() и обозначим размерность
и обозначим размерность ![]() через р. По теореме
3 (в n-мерном пространстве L
имеются подпространства Lk
и Ll,
размерности которых соответственно равны k и l. Если их пересечение
имеет размерность m, то размерность их суммы Lk + Ll равна r = k
+ l – m)
имеем р = k + l
– m.
через р. По теореме
3 (в n-мерном пространстве L
имеются подпространства Lk
и Ll,
размерности которых соответственно равны k и l. Если их пересечение
имеет размерность m, то размерность их суммы Lk + Ll равна r = k
+ l – m)
имеем р = k + l
– m.
Покажем, что ![]() есть
прямая сумма, поэтому размерность Lr+1 равна р + 1, то есть (r + 1) = (k + l – m) +1.
есть
прямая сумма, поэтому размерность Lr+1 равна р + 1, то есть (r + 1) = (k + l – m) +1.
Для этого достаточно показать, что вектор ![]() не принадлежит
пространству
не принадлежит
пространству ![]() . Предположим противное. Пусть
. Предположим противное. Пусть ![]() . Тогда по определению
суммы подпространств существуют векторы х и у такие, что
. Тогда по определению
суммы подпространств существуют векторы х и у такие, что![]() ,
, ![]() ,
, ![]() . (v)
По первой аксиоме аффинного пространства найдётся точка С такая, что
. (v)
По первой аксиоме аффинного пространства найдётся точка С такая, что ![]() , причём
, причём ![]() . По второй аксиоме
аффинного пространства
. По второй аксиоме
аффинного пространства ![]() . (vv)
. (vv)
Учитывая (v), (vv),
находим, что ![]() , так что
, так что ![]() . Получается, что плоскости
Пk и Пl
имеют общую точку С, но это невозможно, поскольку плоскости Пk и Пl
скрещиваются. Теорема 3 доказана.
. Получается, что плоскости
Пk и Пl
имеют общую точку С, но это невозможно, поскольку плоскости Пk и Пl
скрещиваются. Теорема 3 доказана.
Замечание. Рисунок 20 лишь частично иллюстрирует теорему 3.
Например, если размерности Пk и Пl больше m и различны
между собой, ![]() , то, как,
, то, как, ![]()
Проведённые выше рассуждения показывают, что плоскости Пk и Пl, о которых идёт речь в теореме 3, не содержатся ни в какой плоскости меньшей размерности, чем r + 1.
Сохраняя обозначения предыдущего подпункта, сформулируем достаточное условие пересечения двух плоскостей.
Теорема 4. Если в Un даны плоскости Пk
и Пl, такие, что ![]() , где m
– размерность пересечения Lm направляющих подпространств Lk и Ll, то Пk и Пl пересекаются.
, где m
– размерность пересечения Lm направляющих подпространств Lk и Ll, то Пk и Пl пересекаются.
Доказательство. Исключая тривиальный случай, когда какая-нибудь из
данных плоскостей совпадает со всем пространством, имеет ![]()
В расположении двух данных плоскостей могут быть лишь три возможности:
либо Пk параллельна Пl;
либо плоскости Пk и Пl скрещиваются;
либо они пересекаются.
Если Пk параллельна Пl, то для размерности m пересечения соответствующих им пространств Lk и Ll имеем m = min (k, l). Теорема доказана.
2. Размерность многообразия k-плоскостей
Найдём размерность Рn,k, многообразия всех k-плоскостей
n-пространства.
Прежде всего заметим, что число параметров, от которых зависят k+1 точек M0, M1, …, Mk n
– пространства с линейно независимыми векторами ![]() ,
через которые проходит единственная k-плоскость, равно
числу координат,
,
через которые проходит единственная k-плоскость, равно
числу координат, ![]() этих точек, т. е.
(k +1)n. Далее
заметим, что число параметров, от которых зависят те же точки на k-плоскости, равно числу параметров
этих точек, т. е.
(k +1)n. Далее
заметим, что число параметров, от которых зависят те же точки на k-плоскости, равно числу параметров ![]() этих точек, т. е. (k +1)k. Так как в n-пространстве, число параметров, от которых зависят точки
этих точек, т. е. (k +1)k. Так как в n-пространстве, число параметров, от которых зависят точки ![]() равно сумме числа Рn,k и числа параметров,
от которых зависят точки
равно сумме числа Рn,k и числа параметров,
от которых зависят точки ![]() на k-плоскости, то получим, что
на k-плоскости, то получим, что
![]() , т. е.
, т. е.
![]() . (6. 7)
. (6. 7)
§ 7. K-параллелепипеды в пространстве
1. Полуплоскости и параллелепипеды
Если в уравнении
![]() (7. 1)
(7. 1)
k-плоскости придавать одному из параметров tb только
неотрицательные значения ![]() , а
остальным параметрам – произвольные действительные значения, мы получим k-полуплоскость, ограничиваемую (k-1)-плоскостью,
, а
остальным параметрам – произвольные действительные значения, мы получим k-полуплоскость, ограничиваемую (k-1)-плоскостью,
![]() (7. 2)
(7. 2)
Если в том же уравнении (7. 1) придать всем параметрам ![]() только значения
только значения ![]() , мы получим k-параллелепипед с вершинами
, мы получим k-параллелепипед с вершинами
![]() ;
;
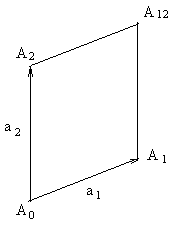
2-параллелепипеды называются параллелограммами.
Условимся называть k-параллелепипед с вершинами А0, А1, А2, …, А12…k параллелепипедом А0 А1 А2 … А12…k.
На рисунке 22 изображён 3-параллелепипед
А0 А1 А2 А3 А12 А13 А123
и параллелограмм А0 А1 А2 А12.
 а)
а) 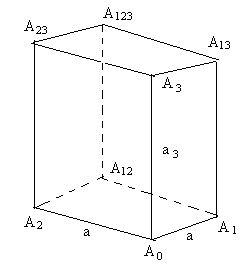 б)
б)
Рис. 22
2. Грани параллелепипеда
Придавая в уравнении (7. 1) значения ![]() всем
параметрам
всем
параметрам ![]() при
при ![]() , а параметру
, а параметру ![]() - значения
- значения ![]() или
или ![]() , мы получим (k - 1)-параллелепипеды,
являющиеся гранями k-параллелепипеда. Грани этих (k- 1)-параллелепипедов называются (k - 2)-гранями k-параллелепипеда,
грани этих (k–3)-гранями k-параллелепипеда
и т. д. Таким образом, k-параллелепипед обладает р
– гранями, где р – пробегает значения от 0 до k
– 1, 0-грани параллелепипеда совпадают с его вершинами, 1-грани называются
рёбрами (при m= 2 - сторонами). На рисунке 22
(а) стороны параллелограмма – четыре отрезка А0 А1,
А0 А2, А0 А3,
А0 А12, А1 А13,
А2 А12, А2 А23,
А3 А13, А12 А123,
А13 А123, А23 А123;
2-грани - шесть параллелограммов А0 А1 А1
А12, А0 А1 А3
А13, А0 А2 А3
А23, А1 А12 А13
А123, А2 А12 А23
А123, А3 А13 А23
А123.
, мы получим (k - 1)-параллелепипеды,
являющиеся гранями k-параллелепипеда. Грани этих (k- 1)-параллелепипедов называются (k - 2)-гранями k-параллелепипеда,
грани этих (k–3)-гранями k-параллелепипеда
и т. д. Таким образом, k-параллелепипед обладает р
– гранями, где р – пробегает значения от 0 до k
– 1, 0-грани параллелепипеда совпадают с его вершинами, 1-грани называются
рёбрами (при m= 2 - сторонами). На рисунке 22
(а) стороны параллелограмма – четыре отрезка А0 А1,
А0 А2, А0 А3,
А0 А12, А1 А13,
А2 А12, А2 А23,
А3 А13, А12 А123,
А13 А123, А23 А123;
2-грани - шесть параллелограммов А0 А1 А1
А12, А0 А1 А3
А13, А0 А2 А3
А23, А1 А12 А13
А123, А2 А12 А23
А123, А3 А13 А23
А123.
Число ![]() р-граней k-параллелепипеда равно
р-граней k-параллелепипеда равно  , где
, где ![]() - число сочетаний из k по р.
- число сочетаний из k по р.
3. Объём прямоугольного параллелепипеда
Определим объём прямоугольного k-параллелепипеда, то есть такого k-параллелепипеда, у которого все векторы ра попарно перпендикулярны. Длина любого отрезка прямоугольного k – параллелепипеда называется его измерением.
Объём прямоугольного k-параллелепипеда называется его измерением.
Объём прямоугольного k-параллелепипеда
только постоянным множителем отличается от произведения его измерений, т. е.
функция ![]() отличается от произведения
отличается от произведения
![]() измерений прямоугольного
параллелепипеда только постоянным множителем
измерений прямоугольного
параллелепипеда только постоянным множителем ![]() .
.
В дальнейшем будем считать этот постоянный множитель равным 1, то есть будем считать, что объём Vk прямоугольного k –параллелепипеда равен произведению его измерений.
![]() (7. 4)
(7. 4)
4. Объём произвольного параллелепипеда
Сравнивая прямоугольные k-параллелепипед и (k–1)-параллелепипед с объёмами, равному данному k-параллелепипеду и одной из его граней мы получим, что объём Vk k-параллелепипеда равен произведению объёма Vk-1 одной из его (k–1)-граней на расстояние hk между этой гранью и параллельной ей (k–1)-гранью.
![]() (7. 5)
(7. 5)
Если назвать выделенную (k–1)-грань k-параллелепипеда его основанием, а расстояние hk его высотой, то формула (7. 5) показывает, что объём k-параллелепипеда равен произведению объёма его основания на высоту.
Объём Vk k-параллелепипеда,
определяемого уравнением ![]() , при
, при ![]() , определяется соотношением
, определяется соотношением
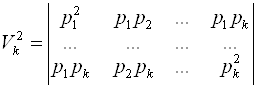 ,
,
т. е. квадрат объёма этого параллелепипеда равен определителю Грамма, составленному из k векторов ра.
Утверждение очевидно при k =1, когда
параллелепипед совпадает с отрезком, определяемым вектором р1,
и объём этого параллелепипеда совпадает с длиной этого отрезка ![]() , т. е.
, т. е. ![]() .
.
Рассмотрим теперь k-параллелепипед и
предположим, что наше утверждение справедливо для его (k
– 1)-граней. Рассмотрим его (k – 1)-грань,
определяемую уравнением ![]() , при
, при ![]() и
и ![]() . Тогда скалярный квадрат
векторного произведения
. Тогда скалярный квадрат
векторного произведения ![]() в k-плоскости k-параллелепипеда, равный
определителю Грамма, составленному из k–1 векторов
в k-плоскости k-параллелепипеда, равный
определителю Грамма, составленному из k–1 векторов ![]() (а < k), равен объёму этой (k –
1)-грани. Так как объём Vk k-параллелепипеда равен произведению
объёма Vk-1
этой (k–1)-грани на соответствующую высоту hk , то объём Vk равен
(а < k), равен объёму этой (k –
1)-грани. Так как объём Vk k-параллелепипеда равен произведению
объёма Vk-1
этой (k–1)-грани на соответствующую высоту hk , то объём Vk равен
![]() , (7. 7)
, (7. 7)
где j - угол между вектором рk и перпендикуляром к (k–1)-грани в k-плоскости k-параллелепипеда.
5. Аффинность k-параллелепипедов
Если даны два произвольных k-параллелепипеда А0 А1… Аk… А12…k и
В0 В1… Вk… В12…k, то системы точек А0, А1, … ,Аk и В0, В1, … ,Вk определяют аффинное преобразование, переводящее первые из этих точек во вторые. Так как при аффинном преобразовании плоскости переходят в плоскости, а параллельные плоскости в параллельные плоскости, это аффинное преобразование переводит весь k- параллелепипед А0 А1… Аk… А12…k в k-параллелепипед В0 В1… Вk… В12…k. Поэтому всякие два k-параллелепипеда аффинны.
Относительный объём k-параллелепипеда,
определяемого уравнением ![]() и
и ![]() , при аффинном
преобразовании относительные величины преобразуются по формуле, то есть
умножается на определитель матрицы этого аффинного преобразования, если k-параллелепипед с объёмом Vk переходит при аффинном преобразовании с матрицей
, при аффинном
преобразовании относительные величины преобразуются по формуле, то есть
умножается на определитель матрицы этого аффинного преобразования, если k-параллелепипед с объёмом Vk переходит при аффинном преобразовании с матрицей ![]() в k-параллелепипед
с объёмом
в k-параллелепипед
с объёмом ![]() , то
, то
![]() (7. 8)
(7. 8)
Отсюда вытекает, что отношения относительных объёмов k-параллелепипедов не изменяются при аффинных преобразованиях.
Выпуклые многогранники
В этом пункте будем
рассматривать действительное k-мерное
аффинное пространство ![]() , считая, что в
нем дана аффинная система координат.
, считая, что в
нем дана аффинная система координат.
Пусть через некоторую
точку ![]() имеющую координаты
имеющую координаты ![]() , проведена прямая в
направлении вектора
, проведена прямая в
направлении вектора ![]() ,
, ![]() координаты которого
обозначим
координаты которого
обозначим ![]() . Согласно изложенному
ранее эту прямую можно задать параметрическими уравнениями
. Согласно изложенному
ранее эту прямую можно задать параметрическими уравнениями
![]() ,
, ![]() .
(7.9)
.
(7.9)
![]() .
.
Пусть на прямой (9)
выбраны какие-нибудь точки ![]() и
и ![]() . Соответствующие им
значения параметра
. Соответствующие им
значения параметра ![]() обозначим
обозначим ![]() и
и ![]() . Предположим, что
. Предположим, что ![]() <
< ![]() .
.
Определение. Множество точек прямой,
удовлетворяющих неравенством ![]()
![]()
![]() , называется отрезок
, называется отрезок ![]()
![]() .
.
Если точка ![]() имеет координаты
имеет координаты ![]() , точка
, точка ![]() имеет координаты
имеет координаты ![]() , то в качестве
направляющего вектора прямой можно взять вектор
, то в качестве
направляющего вектора прямой можно взять вектор ![]() .
Тогда
.
Тогда ![]() , и для точки прямой имеем
, и для точки прямой имеем
![]()
![]() , причем
, причем ![]() =
0 в точке
=
0 в точке ![]() ,
, ![]() = 1 в точке
= 1 в точке ![]() , так что отрезок
, так что отрезок ![]()
![]() задается теперь
неравенствами 0
задается теперь
неравенствами 0 ![]()
![]()
![]() 1. Положим 1
1. Положим 1 ![]() =
= ![]() ,
, ![]() =
= ![]() . Тогда для точек отрезка
. Тогда для точек отрезка ![]()
![]() и только для них имеем
и только для них имеем ![]() ,
, ![]() , (7.10)
, (7.10)
![]() ,
, ![]() ,
,
![]() .
.
Точка,
в которой ![]() , называется серединой
отрезка
, называется серединой
отрезка ![]()
![]() .
.
Определение. Множество точек действительного
аффинного пространства называется выпуклым, если вместе с каждыми двумя своими
точками ![]() ,
,![]() оно содержит отрезок
оно содержит отрезок ![]()
![]() .
.
Простейшими примерами
выпуклых множеств могут служить: отрезок, плоскость любой размерности, все
пространство ![]() .
.
Множество, состоящее из одной точки, и пустое множество также считается выпуклыми.
Из определения следует,
что пересечение любой совокупности выпуклых множеств само является выпуклым
множеством. В самом деле, если точки ![]() ,
,![]() принадлежат пересечению
некоторой совокупности выпуклых множеств, то отрезок
принадлежат пересечению
некоторой совокупности выпуклых множеств, то отрезок ![]()
![]() принадлежит каждому из них
множеств, а значит, и их пересечению.
принадлежит каждому из них
множеств, а значит, и их пересечению.
Пусть в пространстве ![]() дана произвольная
гиперплоскость
дана произвольная
гиперплоскость
![]() . (7.11)
. (7.11)
Гиперплоскость (11) развивает пространство на две части, называемые открытыми полупространствами. Их точки характеризуются неравенствами
![]() и
и ![]() соответственно.
(7.12)
соответственно.
(7.12)
Присоединяя к открытому полупространству гиперплоскость (11), мы получим так называемое замкнутое полупространство. Одно из них состоит из точек, координаты которых удовлетворяют неравенствам.
Существенно, что рассматриваемое пространство является действительным.
Каждое полупространство является выпуклым множеством.
Таким образом произвольная
точка ![]() принадлежит пространству (7,
12). Но точка
принадлежит пространству (7,
12). Но точка ![]() на отрезке
на отрезке ![]()
![]() взята произвольно, значит,
весь отрезок
взята произвольно, значит,
весь отрезок ![]()
![]() принадлежит пространству.
принадлежит пространству.
Определение. Пересечение конечного числа полупространств (если оно не пустое) называется выпуклым многогранником.
Ограничимся рассмотрением
многогранников, образованных пересечением замкнутых полупространств. С
наглядной точки зрения выпуклый многогранник представляет собой кусок
пространства, высеченный несколькими гиперплоскостями. (![]() =3).
=3).
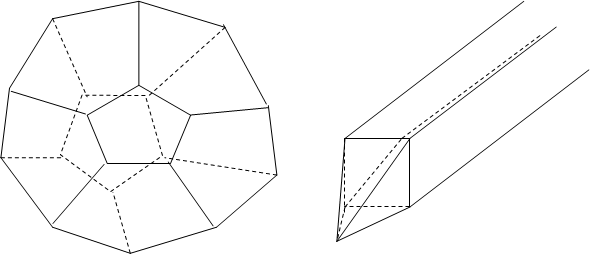
Рис. 23 Рис. 24
Может быть так, что
многогранник целиком содержится в некоторой ![]() -мерной
плоскости
-мерной
плоскости ![]() <
< ![]() (при
(при ![]() = 3,
= 3, ![]() = 2).
= 2).
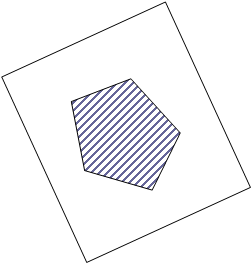
Рис.25
Многогранник называется ![]() -мерным параллелепипедом,
если в некоторой аффинной системе координат он задается неравенствами
-мерным параллелепипедом,
если в некоторой аффинной системе координат он задается неравенствами
0 ![]()
![]()
![]() 1,
1, ![]() и построен на независимых
векторах
и построен на независимых
векторах ![]() , приложенных к точке
, приложенных к точке ![]() .
.
Где ![]() - начало в координатах, и
- начало в координатах, и ![]() - базис.
- базис. ![]() -мерный параллелепипед при
-мерный параллелепипед при ![]() = 1 представляет собой
отрезок, при
= 1 представляет собой
отрезок, при ![]() = 2 – параллелограмм.
= 2 – параллелограмм.
Часть параллелепипеда (0 ![]()
![]()
![]() 1,
1, ![]() ), расположенная в
какой-нибудь из гиперплоскостей
), расположенная в
какой-нибудь из гиперплоскостей ![]() = 0 или
= 0 или
![]() = 1, сама является (
= 1, сама является (![]() - 1)-мерным
параллелепипедом и называется (
- 1)-мерным
параллелепипедом и называется (![]() -
1)-мерной гранью параллелепипеда.
-
1)-мерной гранью параллелепипеда.
Пример. В трехмерном евклидовом пространстве с заданной декартовой
прямоугольной системой координат (![]() )
рассмотрим прямоугольные параллелепипеды, ребра которых параллельны
координатным осям. Пусть (
)
рассмотрим прямоугольные параллелепипеды, ребра которых параллельны
координатным осям. Пусть (![]() ) –
координаты центра параллелепипеда,
) –
координаты центра параллелепипеда, ![]() – длины
его ребер, параллельных осям
– длины
его ребер, параллельных осям ![]() соответственно.
Обозначим через
соответственно.
Обозначим через ![]() множество тех
параллелепипедов указанного вида, центры которых лежат в кубе
множество тех
параллелепипедов указанного вида, центры которых лежат в кубе ![]() ,
, ![]() ,
, ![]() , длины ребер не превышают
, длины ребер не превышают ![]() . Каждому параллелепипеду
из множества
. Каждому параллелепипеду
из множества ![]() можно поставить в
соответствие точку шестимерного аффинного пространства
можно поставить в
соответствие точку шестимерного аффинного пространства ![]() с координатами (
с координатами (![]() ,
, ![]() ). Тогда само множество
). Тогда само множество ![]() можно рассматривать как
шестимерный параллелепипед.
можно рассматривать как
шестимерный параллелепипед.
![]()
![]()
![]()
![]()
![]() ,
, ![]()
![]()
![]()
![]()
![]() ,
, ![]()
![]()
![]()
![]()
![]() ,
,
![]()
![]()
![]()
![]()
![]() ,
, ![]()
![]()
![]()
![]()
![]() ,
, ![]()
![]()
![]()
![]()
![]() .
.
Затем, что геометрические фигуры одного пространства часто бывает удобно рассматривать как точки другого пространства.
Определение. Множество точек в аффинном
пространстве ![]() называется ограниченным,
если координаты всех точек этого множества удовлетворяют неравенству
называется ограниченным,
если координаты всех точек этого множества удовлетворяют неравенству ![]() (
(![]() > 0 – некоторое число).
> 0 – некоторое число).
Это определение не зависит от выбора аффинной системы координат. Множество ограниченно в том и только в том случае, если оно содержится в некотором параллелепипеде.
Определение. Выпуклой оболочкой множества ![]() точек в аффинном
пространстве
точек в аффинном
пространстве ![]() называется такое выпуклое
множество
называется такое выпуклое
множество ![]() , которое содержится в
любом выпуклом множестве, содержащем
, которое содержится в
любом выпуклом множестве, содержащем ![]() .
.
Пример. 1) Выпуклой оболочкой двух точек ![]() ,
,![]() является отрезок
является отрезок ![]()
![]()
![]() .
.
2) Выпуклая оболочка любого конечного числа точек является ограниченным выпуклым многогранником, а конечная система точек – его вершинами.
Пусть в аффинном
пространстве ![]() даны точки
даны точки ![]() с радиус-векторами
с радиус-векторами ![]() соответственно.
соответственно.
Определение. Выпуклая оболочка системы точек ![]() , находящихся в общем
положении, называется
, находящихся в общем
положении, называется ![]() -мерным
симплексом с вершинами
-мерным
симплексом с вершинами ![]() .
.
Симплекс с вершинами ![]() при
при ![]() . При этом числа
. При этом числа ![]() называются
барицентрическими координатами точки симплекса, имеющей радиус-вектор
называются
барицентрическими координатами точки симплекса, имеющей радиус-вектор ![]() .
.
Частные случаи:
нульмерный симплекс – одна точка;
одномерный симплекс - отрезок;
двумерный симплекс – треугольник;
трехмерный симплекс – треугольная пирамида.
Точка симплекса, в
которой все барицентрические координаты равны между собой  , называется центром
симплекса.
, называется центром
симплекса.
Пусть ![]() - симплекс с вершинами
- симплекс с вершинами ![]() ; и пусть
; и пусть ![]() - какой-нибудь из его
вершин.
- какой-нибудь из его
вершин. ![]() -мерный симплекс, который
является выпуклой оболочкой вершин
-мерный симплекс, который
является выпуклой оболочкой вершин ![]() называется
называется
![]() -мерной гранью симплекса
-мерной гранью симплекса ![]() . Одномерные грани, то есть
отрезки, соединяющие вершины, называются ребрами симплекса.
. Одномерные грани, то есть
отрезки, соединяющие вершины, называются ребрами симплекса.
Две грани размерности ![]() и
и ![]() -
- ![]() называются
противоположными гранями симплекса
называются
противоположными гранями симплекса ![]() , если
они не имеют общих вершин.
, если
они не имеют общих вершин.
В качестве упражнений докажем, что симплекс является выпуклой оболочкой пары противоположных граней, и что противоположные грани симплекса всегда располагаются в скрещивающихся плоскостях и что отрезок, соединяющий центры противоположных граней, проходит через центр симплекса.
Докажем, что ![]() -мерный симплекс в
-мерный симплекс в ![]() -мерном пространстве
представляет собой пересечение замкнутых подпространств в числе
-мерном пространстве
представляет собой пересечение замкнутых подпространств в числе ![]() .
.
Пусть ![]() - вершины симплекса
- вершины симплекса ![]() . Примем
. Примем ![]() за начало координат, базис
выберем следующим образом:
за начало координат, базис
выберем следующим образом:
![]() ,
, ![]() ,
…,
,
…, ![]() .
.
Тогда соотношения при ![]() в координатах примут вид
в координатах примут вид
 (7.13)
(7.13)
откуда следует, что
 (7.14)
(7.14)
С другой стороны, из
(7.14) вытекает (7.13),если положить ![]() для
для ![]() ,
, ![]() . Таким образом, системы
(7.13) и (7.14) эквивалентны и задают один и тот же симплекс
. Таким образом, системы
(7.13) и (7.14) эквивалентны и задают один и тот же симплекс ![]() . (при
. (при ![]() =3).
=3).
|
|
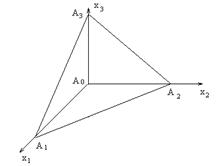
Рис. 26
Система неравенств (7.14)
показывает, пересечением каких полупространств образован симплекс ![]() .
.
Выше говорилось, что многогранник можно представить в виде куска пространства, «высеченного» несколькими гиперплоскостями.
Отметим попутно, что слово «симплекс» (simplex) в переводе с латинского означает «простой».
В следующем параграфе
данной главы состоится знакомство с ![]() -симплексами
в пространстве.
-симплексами
в пространстве.
§8. K-симплексы в пространстве
1. Симплексы
Если заданы ![]() точек
точек ![]() не лежащих в одной (
не лежащих в одной (![]() ) –плоскости, то точки,
определяемые радиус-векторами
) –плоскости, то точки,
определяемые радиус-векторами
![]() , (8.1)
, (8.1)
где индекс ![]() пробегает значения от 0 до
пробегает значения от 0 до
![]() , а параметры
, а параметры ![]() связаны условием
связаны условием
![]() (8.2)
(8.2)
образуют ![]() - симплекс с вершинами
- симплекс с вершинами ![]() , который будем называть
, который будем называть ![]() - симплексом
- симплексом ![]() .На рисунке 23 а, б, и в изображен
2 - симплекс (треугольник)
.На рисунке 23 а, б, и в изображен
2 - симплекс (треугольник) ![]() 3 –
симплекс (тетраэдр)
3 –
симплекс (тетраэдр) ![]() и 4 – симплекс
и 4 – симплекс ![]() .
.
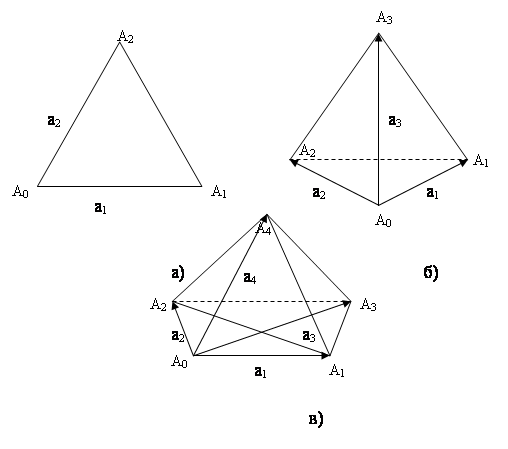
Рис. 27
Грани симплекса.
Если в уравнении (8.1)
один из параметров ![]() равен 0,
получаем
равен 0,
получаем ![]() - симплекс, называемый
гранью
- симплекс, называемый
гранью ![]() - симплекса. Грани этих
- симплекса. Грани этих ![]() - симплексов называются
- симплексов называются ![]() - гранями
- гранями ![]() - симплекса, грани этих
- симплекса, грани этих ![]() -симплексов называются
-симплексов называются ![]() - гранями
- гранями ![]() - симплекса и т.д. Таким
образом,
- симплекса и т.д. Таким
образом, ![]() - симплекс обладает
- симплекс обладает ![]() - гранями, где
- гранями, где ![]() пробегает значения от 0 до
пробегает значения от 0 до
![]() ; 0 – грани
; 0 – грани ![]() - симплекса совпадают с его
вершинами, 1-грани называются ребрами (при
- симплекса совпадают с его
вершинами, 1-грани называются ребрами (при ![]() -
сторонами). На рисунке 3, а стороны треугольника – 3 отрезка
-
сторонами). На рисунке 3, а стороны треугольника – 3 отрезка ![]() ; на рисунке 3, б ребра
тетраэдра - 6 отрезков
; на рисунке 3, б ребра
тетраэдра - 6 отрезков ![]() , 2–грани-4треугольника
А0А1А2,
, 2–грани-4треугольника
А0А1А2, ![]()
![]() ; на рисунке 3, в - ребра 4
– симплекса - 10 отрезков
; на рисунке 3, в - ребра 4
– симплекса - 10 отрезков ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() ,
, ![]() ,
, ![]() , 2 – грани - 10
треугольников
, 2 – грани - 10
треугольников ![]()
![]()
![]()
![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() , 3-грани - 5 тетраэдров
, 3-грани - 5 тетраэдров ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
Если представим векторы ![]() в виде
в виде ![]() , то формулу (1) можно
переписать в виде
, то формулу (1) можно
переписать в виде ![]() , где параметры
, где параметры ![]() ограничены условиями 0
ограничены условиями 0 ![]()
![]() ,
, ![]() .
.
Так как любая система ![]() вершин
вершин ![]() - симплекса определяет
- симплекса определяет ![]() - грань симплекса, число
- грань симплекса, число ![]()
![]() -
граней симплекса равно числу сочетаний из
-
граней симплекса равно числу сочетаний из ![]() по
по
![]() , т.е.
, т.е. ![]() =
= . (8.3)
. (8.3)
2. Объем симплекса.
Прежде всего покажем, что
объем ![]() произвольного
произвольного ![]() - симплекса выражается
через объем
- симплекса выражается
через объем ![]() одной из его
одной из его ![]() - граней и расстояния
- граней и расстояния ![]() от вершины, лежащей против
этой грани, до плоскости этой грани по формуле
от вершины, лежащей против
этой грани, до плоскости этой грани по формуле
![]() . (8.4)
. (8.4)
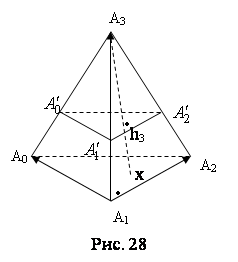 Если будем называть выделенную
Если будем называть выделенную ![]() -грань
-грань ![]() - симплекса его основанием,
а расстояние
- симплекса его основанием,
а расстояние ![]() - его высотой, то формула
(8.4) показывает, что объем
- его высотой, то формула
(8.4) показывает, что объем ![]() -
симплекса равен
-
симплекса равен ![]() произведение его
основания на высоту. Пусть основание k – симплекса
произведение его
основания на высоту. Пусть основание k – симплекса ![]() (на рисунке 28
изображается
(на рисунке 28
изображается ![]() при
при ![]() )
)
Проведем плоскость,
параллельную плоскости ![]() - грани
- грани ![]() на расстоянии
на расстоянии ![]() от нее. Это плоскость
высечет из нашего k – симплекса
от нее. Это плоскость
высечет из нашего k – симплекса ![]() -симплекс
-симплекс ![]() и отсечет от него k – симплекс
и отсечет от него k – симплекс ![]() , Обозначим
, Обозначим ![]() -симплекса
-симплекса ![]() через
через ![]() , то формулу для
определения объема k – симплекса
можно записать в виде
, то формулу для
определения объема k – симплекса
можно записать в виде
 . (8.5)
. (8.5)
Так как k – симплекса ![]() может быть получен из k – симплекса
может быть получен из k – симплекса ![]() гомотетией с центром в
вершине
гомотетией с центром в
вершине ![]() и с коэффициентом
и с коэффициентом 
![]() получается из
получается из ![]() - грани
- грани ![]() той же гомотетией. Так как
матрица гомотетии, отображающей
той же гомотетией. Так как
матрица гомотетии, отображающей ![]() - грань
- грань
![]() на
на ![]() - грань
- грань ![]() является матрицей
является матрицей ![]() -20 порядка вида
-20 порядка вида  , определить этой матрицы
равен
, определить этой матрицы
равен  и объем
и объем ![]() может быть записан в виде
может быть записан в виде
 .
.
Поэтому
 .
.
Применяя формулу (4) к
объему ![]()
![]() - грани, выразим этот объем
через объем
- грани, выразим этот объем
через объем ![]() одной из ее
одной из ее ![]() - граней и соответственную
высоту
- граней и соответственную
высоту ![]() этой
этой ![]() - грани. Аналогично выразим
объемы
- грани. Аналогично выразим
объемы ![]() ,
, ![]() , … ,
, … , ![]() и площадь
и площадь ![]() , вложенных друг в друга
, вложенных друг в друга ![]() - грани,
- грани, ![]() - грани, …, 3-грани и 2-грани
симплекса через объемы
- грани, …, 3-грани и 2-грани
симплекса через объемы ![]() , …,
, …, ![]() , площадь
, площадь ![]() и длину
и длину ![]() одного из ребер
одного из ребер ![]() - симплекса и
соответственные высоты
- симплекса и
соответственные высоты ![]() ,
, ![]() , … ,
, … , ![]() этих граней, получим что
этих граней, получим что

![]() .
.
В том случае, когда k – симплекс определяется уравнением
(1), где ![]() , произведение
, произведение ![]()
![]()
![]() …
…![]()
![]() равно объему k – параллелепипеда, определяемого
уравнением
равно объему k – параллелепипеда, определяемого
уравнением
![]() с векторами
с векторами ![]() при 0
при 0![]() , поэтому объем
, поэтому объем ![]() k – симплекса связан с объемом
k – симплекса связан с объемом ![]() соответствующего
k – параллелепипеда соотношением
соответствующего
k – параллелепипеда соотношением
![]() =
=![]()
![]() . (8.6)
. (8.6)
Так как квадрат объема ![]() в силу (7.6 из § 7) равен
определителю Грамма, составленному из вектора
в силу (7.6 из § 7) равен
определителю Грамма, составленному из вектора ![]() ,
из формулы (8.6) вытекает, что объем
,
из формулы (8.6) вытекает, что объем ![]() k – симплекса, определяемого
уравнением (8.1), где
k – симплекса, определяемого
уравнением (8.1), где ![]()
![]() , определяется соотношением
, определяется соотношением
 (8.7)
(8.7)
Объем ![]()
![]() – симплексa, определяемого уравнением (8.1) при
– симплексa, определяемого уравнением (8.1) при ![]() =
= ![]() , где
, где ![]() , равен
, равен
![]() =
=![]()
![]() , (8.8)
, (8.8)
квадрат косого
произведения (![]() ) равен
определителю Грамма, составленному из векторов
) равен
определителю Грамма, составленному из векторов ![]() .
.
3. Аффинность k – симплексов.
Если даны два
произвольных k – симплекса ![]() и
и ![]() , то системы их вершин
определяют аффинное преобразование, переводящее первую из этих систем вершин во
вторую.
, то системы их вершин
определяют аффинное преобразование, переводящее первую из этих систем вершин во
вторую.
Так как при аффинном
преобразовании плоскости переходят в плоскости, это аффинное преобразование
переводит весь k – симплекс ![]() в k – симплекс
в k – симплекс ![]() .
Поэтому всякие два k – симплекса
аффинны.
.
Поэтому всякие два k – симплекса
аффинны.
Относительный объем k – симплекса, определяемого
уравнением (8.1) при ![]() =
= ![]() , где
, где ![]() , выражается по формуле при
аффинном преобразовании с оператором
, выражается по формуле при
аффинном преобразовании с оператором ![]() умножается
на определитель матрицы оператора
умножается
на определитель матрицы оператора ![]() , получаем,
что при аффинном преобразовании относительные объемы всех k – симплексов умножаются на
определитель матрицы этого аффинного преобразования, т.е. если k – симплекс с относительным объемом
, получаем,
что при аффинном преобразовании относительные объемы всех k – симплексов умножаются на
определитель матрицы этого аффинного преобразования, т.е. если k – симплекс с относительным объемом ![]() переходит при аффинном
преобразовании с матрицей
переходит при аффинном
преобразовании с матрицей ![]() в k – симплекс с объемом
в k – симплекс с объемом ![]() , то, так же как в случае k – параллелепипедов,
, то, так же как в случае k – параллелепипедов,
![]() =
=![]()
![]()
![]() . (8.9)
. (8.9)
Отсюда вытекает, что отношения объемов k – симплексов не изменяются при аффинных преобразованиях.
Правильный k – симплекс
Определение правильных многоугольников и многогранников позволяет определить правильный k – симплекс.
Прежде всего построим
правильный k – симплекс. Правильный k – симплекс при ![]() = 2 – равносторонний
треугольник. Равносторонний треугольник
= 2 – равносторонний
треугольник. Равносторонний треугольник ![]() с
центром в начале координат и со стороной
с
центром в начале координат и со стороной ![]() на
прямой
на
прямой ![]() имеет вершины в точках с
координатами
имеет вершины в точках с
координатами ![]() ,
, ![]() и
и ![]() .
.
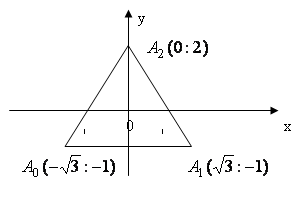
Рис. 29
Для построения
правильного k – симплекса ![]() с центром в начале системы
прямоугольных координат и с гранью
с центром в начале системы
прямоугольных координат и с гранью ![]() на
плоскости
на
плоскости ![]() предположим, что мы
построили аналитичный правильный
предположим, что мы
построили аналитичный правильный ![]() -
симплекс.
-
симплекс.
Так как центр О k – симплекса делит отрезок прямой ![]() между точкой
между точкой ![]() и плоскостью
и плоскостью ![]() в отношении
в отношении ![]() : 1, а прямая
: 1, а прямая ![]() совпадает с
совпадает с ![]() -ой координатной осью,
вершина
-ой координатной осью,
вершина ![]() имеет координаты (0, 0, 0,
…
имеет координаты (0, 0, 0,
…![]() );
); ![]() -е координаты вершин
-е координаты вершин ![]() равны – 1, а первые
равны – 1, а первые ![]() -1 координаты этих вершин
можно получить из координат вершин (
-1 координаты этих вершин
можно получить из координат вершин (![]() -1) -
симплекса
-1) -
симплекса ![]() умножением их на такой
множитель
умножением их на такой
множитель ![]() , чтобы все расстояния
, чтобы все расстояния ![]() ,
, ![]() , …,
, …, ![]() =
=![]() =
=![]()
Расстояние от центра
построенного ![]() - симплекса
- симплекса ![]() до его (
до его (![]() -1) – граней равно 1, а
расстояние от того же центра до вершин этого
-1) – граней равно 1, а
расстояние от того же центра до вершин этого ![]() -
симплекса равно
-
симплекса равно ![]() . Длина каждого
из ребер этого
. Длина каждого
из ребер этого ![]() - симплекса равна
- симплекса равна
![]() .
.
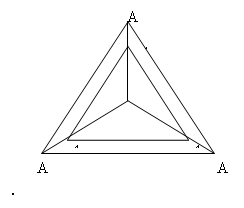 Из определения правильного
Из определения правильного ![]() -
симплекса видно, что все
-
симплекса видно, что все ![]() - грани
правильного
- грани
правильного ![]() - симплекса являются
правильными
- симплекса являются
правильными ![]() - симплексами.
- симплексами.
Рис.30
На рисунке изображен
правильный (![]() -1) – симплекс (
-1) – симплекс (![]() = 4)
= 4)
Объем правильного ![]() - симплекса.
- симплекса.
Вычислим объем
построенного правильного симплекса. Так как объем основания этого ![]() - симплекса равен
произведению
- симплекса равен
произведению ![]() , а высота этого
, а высота этого ![]() - симплекса равна
- симплекса равна ![]() +1, получаем, что
+1, получаем, что

 .
.
 .
.
При ![]() = 2 формула дает нам
= 2 формула дает нам ![]() .
.
При ![]() = 3 формула
= 3 формула ![]() .
.
Объем правильного ![]() - симплекса, (
- симплекса, (![]() -1) – грани которого
находятся на расстоянии
-1) – грани которого
находятся на расстоянии ![]() от его
центра, равен
от его
центра, равен
 .
.
§ 9. K-шары в пространстве
Называть k-мерной сферой евклидова k-пространства или k-сферой этого пространства множество всех точек этого пространства, лежащих в одной (k + 1)-плоскости и отстоящих от данной точки, называемой центром k-сферы, на одном и том же расстоянии, называемом радиусом k-сферы.
При k = n – 1 k-сфера определяется как множество всех точек пространства, отстоящих от одной точки на одном и том же расстоянии: в дальнейшем, говоря «сфера», будем иметь в виду (n – 1)-сферу. При k = 1, k-сфера называется окружностью.
Если радиус (k– 1)-сферы равен R, то множество всех точек k-плоскости этой (k– 1)-cферы, находящихся от центра (k– 1)-cферы
на расстоянии ![]() , называется k-шаром. При k = n n-шар определяется как множество всех точек n-пространства, отстоящих от центра
сферы на расстоянии
, называется k-шаром. При k = n n-шар определяется как множество всех точек n-пространства, отстоящих от центра
сферы на расстоянии ![]() . В дальнейшем,
говоря «шар», будем иметь в виду n-шар. При k = 2 k-шар называется кругом.
. В дальнейшем,
говоря «шар», будем иметь в виду n-шар. При k = 2 k-шар называется кругом.
Если центр сферы – точка М0(х0),
а радиус равен R (рис. 31),
радиус-вектор х произвольной точки М сферы связан условием,
состоящим в том, что расстояние М0М равно R. Так как это расстояние равно модулю
вектора ![]() , т. е.
, т. е. ![]() , то уравнение сферы с центром в точке М0, и
радиусом R имеет
, то уравнение сферы с центром в точке М0, и
радиусом R имеет
![]() (9. 1)
(9. 1)
или, после возведения обеих частей уравнения (9. 1) в квадрат
![]() (9. 2)
(9. 2)
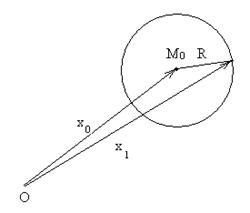
Рис. 31
Уравнению (9. 2) не удовлетворяет радиус-вектор ни одной точки, для которой расстояние М0М не равно R, так как и расстояние М0М и радиус R – положительные числа.
Уравнение (9. 2) называется векторным уравнением сферы. Это уравнением сферы. Это уравнение является частным случаем векторного уравнения поверхности. Поэтому сфера является частным случаем уравнения поверхности, так как k-сферу можно рассматривать как сферу в (k + 1)-пространстве.
Так как k-сфера с центром в точке М0(х0) и радиусом в некоторой (k + 1)-плоскости является пересечением сферы с тем же центром и радиусом с указанной (k + 1)-плоскостью, уравнениями k-сферы является уравнение (9. 2) сферы с тем же центром и радиусом и уравнения (k + 1)-плоскости.
Если центр сферы находится в начале, х0=0, то уравнение (9. 2) примет вид
![]() (9. 3)
(9. 3)
Уравнение (9. 2) можно переписать в виде
![]() (9. 4)
(9. 4)
или, умножая обе части этого равенства на число а, в виде
![]() (9. 5)
(9. 5)
Вектор ![]() и число с в
уравнении (9. 5) связаны с радис-вектором х0 центра сферы и
её радиусом R соотношениями
и число с в
уравнении (9. 5) связаны с радис-вектором х0 центра сферы и
её радиусом R соотношениями
![]() ,
,
![]() (9. 6)
(9. 6)
Поэтому, если дано уравнение (9. 5) сферы, то центр и радиус этой сферы определяются соотношениями.
![]() ,
,  (9. 7)
(9. 7)
Уравнение (9. 5) при а = 1, т. е. уравнение
![]() (9. 8)
(9. 8)
называется нормальным уравнением сферы. В случае нормального уравнения сферы соотношения (9. 7) показывает, что, для того чтобы уравнение (9. 5) было уравнением сферы, необходимо выполнение неравенства
![]() (9. 9)
(9. 9)
В случае, когда ![]() , уравнению (9. 5)
удовлетворяет только одна точка М0(х0),
которую можно рассматривать как сферу нулевого радиуса. Для того, чтобы общее
уравнение второй степени было бы уравнением сферы, необходимо выполнение
неравенства, равносильного неравенству (9. 9).
, уравнению (9. 5)
удовлетворяет только одна точка М0(х0),
которую можно рассматривать как сферу нулевого радиуса. Для того, чтобы общее
уравнение второй степени было бы уравнением сферы, необходимо выполнение
неравенства, равносильного неравенству (9. 9).
Геометрия k-сфер
1. Уравнение k-сфер
Определим k-сферы как пересечения сферы с (k+1)-плоскостью. Так как (k+1)-плоскость в свою очередь является пересечением n – k – 1 плоскостей, а каждая из этих плоскостей может быть заменена такой сферой, что указанная плоскость является радикальной плоскостью для этой сферы и данной сферы, k-сфера является пересечением n – k независимых сфер. Поэтому k – сферу можно задать n – k – уравнениями
![]()
В этом случае произвольная сфера, проходящая через данную k-сферу, определяется уравнением
![]() (9. 10)
(9. 10)
При k = n – 2 совокупность сфер с уравнениями вида (9. 10) составляет пучок сфер.
Если даны две сферы
![]() ,
, ![]() ,
,
то совокупность сфер с уравнениями
![]() называется
пучком сфер,
называется
пучком сфер,
содержащем две сферы.
Уравнение при ![]() является уравнением
плоскости.
является уравнением
плоскости.
Взаимное расположение двух k-сфер
Две k-сферы k-пространства без общих точек будем называть зацепленными, если всякая сфера, проходящая через одну из этих k-сфер, пересекается со всякой сферой, проходящей через другую k-сферу. Будем называть две k-сферы k-пространства без общих точек незацепленными, если существуют непересекающиеся сферы, проходящие через эти k-сферы.
На рисунке изображены различные виды взаимного расположения двух окружностей в 3-пространстве.
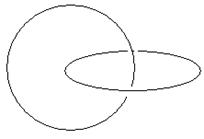
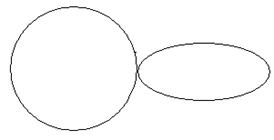
а) зацепление б) пересечение в точке
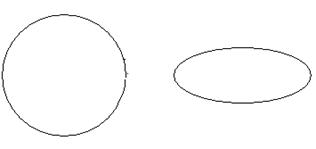
в) незацепление
Рис. 32
Объём сферы
Объём сферы радиуса r, который будем обозначать Sk, выражается интегралом
![]() ,
,
в котором переменное ![]() изменяется от 0 до 2p, а переменные
изменяется от 0 до 2p, а переменные ![]() (при
i > 1) от
(при
i > 1) от ![]() до
до ![]() поэтому этот интеграл
равен произведению k
интегралов
поэтому этот интеграл
равен произведению k
интегралов

тогда объём Sk сферы радиуса r в k-пространстве при чётном n равен:
 (9. 11)
(9. 11)
и для n чётного: 
Формулы объёма дают при k = 2 (считая 0!! = 1), 3, 4 и 5 соответственно.
![]() ,
, ![]()
![]()
![]() .
.
Объём шара
Объём шара радиуса r, который будем обозначать Vk, выражается интегралом
![]()
который с помощью интеграла (9. 11) для вычисления объёма сферы Sk может быть записан в виде
Поэтому объём Vk шара радиуса r в k-пространстве при чётном и нечётном n соответственно равен
 ,
,  (9. 12)
(9. 12)
Формула (9. 12) дает при k = 2, 3, 4, 5 соответственно
![]() ,
, ![]() ,
, ![]() ,
, ![]() (9. 13)
(9. 13)
Глава III. Применения многомерной геометрии
§ 10. О необходимости введения многомерного пространства (на примерах задач)
В чём состоит польза многомерных пространств? Где они применяются? Зачем понадобилось расширять представления о пространстве от реального трёхмерного мира до столь далёких абстракций, которые нелегко и не сразу укладываются в сознании?
Для ответа на эти вопросы необходимо рассмотреть несколько примеров задач.
Пример 1. Сумма n чисел равна единице. Каковы должны быть эти числа, чтобы сумма их квадратов была наименьшей?
Рис. 33
Решение. Получим ответ на поставленный вопрос геометрическим путём, рассматривая сначала случай n = 2, затем n = 3, а потом обсудим ситуацию при n > 3.
Итак, пусть сначала n = 2. Иначе говоря, рассматривая
числа х, у, удовлетворяющие условию х + у = 1, и требуется найти,
в каком случае сумма квадратов х2 + у2
будет наименьшей. Уравнение х + у = 1 определяет на координатной
плоскости прямую (рис. 33). Рассмотрим окружность S с центром в начале координат, которая касается этой
прямой (точка А). Если точка М(х, у) прямой l отлична от А, то она лежит
вне окружности S и поэтому |
ОМ| больше радиуса r
этой окружности, т. е. ![]() . Если же М =
А, то сумма х2 + у2 равна r, т.е. именно для точки А эта
сумма принимает наименьшее значение. Точка А имеет координаты х = у =
1/2; это и есть решение поставленной алгебраической задачи при (n = 2).
. Если же М =
А, то сумма х2 + у2 равна r, т.е. именно для точки А эта
сумма принимает наименьшее значение. Точка А имеет координаты х = у =
1/2; это и есть решение поставленной алгебраической задачи при (n = 2).

Рис. 34
Пусть n = 3. Уравнение x + y + z =1 определяет в пространстве плоскость L. Рассмотрим сферу S c центром в начале координат, касающуюся этой плоскости в
некоторой точке А (рис. 34). Для любой точки ![]() ,
отличной от А, её расстояние от точки О больше радиуса r сферы S,
,
отличной от А, её расстояние от точки О больше радиуса r сферы S, ![]() и
поэтому
и
поэтому ![]() , при М = А имеем
, при М = А имеем ![]() .
.
Таким образом, именно для
точки А сумма ![]() принимает
наименьшее значение. Точка А имеет равные координаты: x = y = z (поскольку при повороте пространства, переставляющем
оси координат:
принимает
наименьшее значение. Точка А имеет равные координаты: x = y = z (поскольку при повороте пространства, переставляющем
оси координат: ![]() , и плоскость L и сфера S переходят в себя, а поэтому их общая
точка остаётся неподвижной). А так как x + y + z =1, то точка А имеет координаты x = y = z = 1/3; это и есть решение поставленной задачи (для n=3).
, и плоскость L и сфера S переходят в себя, а поэтому их общая
точка остаётся неподвижной). А так как x + y + z =1, то точка А имеет координаты x = y = z = 1/3; это и есть решение поставленной задачи (для n=3).
Рассмотрим произвольное n; рассуждения будем вести в n-мерном пространстве, точками
которого являются последовательности (х1, х2,
…, хn),
состоящие из n
действительных чисел. Уравнение ![]() определяет
в этом пространстве «плоскость» L, имеющую размерность n
– 1 (гиперплоскость в n-мерном
пространстве). Рассмотрим сферу S с центром в начале координат О, касающуюся гиперплоскости L в некоторой точке А. Все
точки гиперплоскости L,
кроме А, лежат вне сферы S, т. е. находятся от начала координат О на расстоянии, равном r. Следовательно, сумма
определяет
в этом пространстве «плоскость» L, имеющую размерность n
– 1 (гиперплоскость в n-мерном
пространстве). Рассмотрим сферу S с центром в начале координат О, касающуюся гиперплоскости L в некоторой точке А. Все
точки гиперплоскости L,
кроме А, лежат вне сферы S, т. е. находятся от начала координат О на расстоянии, равном r. Следовательно, сумма ![]() принимает наименьшее
значение по сравнению со всеми другими точками гиперплоскости L. Заметим теперь, что все координаты
точки А равны между собой:
принимает наименьшее
значение по сравнению со всеми другими точками гиперплоскости L. Заметим теперь, что все координаты
точки А равны между собой: ![]() (поскольку
поворот пространства, переставляющий оси координат:
(поскольку
поворот пространства, переставляющий оси координат: ![]() ,
и плоскость L
и сфера S переходят в себя, а поэтому их общая
точка остаётся неподвижной), откуда
,
и плоскость L
и сфера S переходят в себя, а поэтому их общая
точка остаётся неподвижной), откуда ![]() . Итак,
при
. Итак,
при ![]() сумма квадратов
сумма квадратов ![]() принимает наименьшее
значение для
принимает наименьшее
значение для ![]() .
.
Пример 2. На три завода З1, З2, З3 (рис. 35) нужно завести сырьё одинакового вида, которое хранится на двух складах С1, С2 в соответствии с данными, указанными в таблице.
Наличие сырья |
Потребность в сырье |
|||
|
С1 |
С2 |
З1 |
З2 |
З3 |
| 20 т | 25 т | 10 т | 15 т | 20 т |
Требуется найти наиболее выгодный вариант перевозок, т. е. вариант, для которого общее количество тонно-километров будет наименьшим.
Решение. Обозначим через х и у количество сырья, которое нужно вывести со склада С1 соответственно на заводы З1, З2. Тогда со второго склада нужно довезти на эти заводы 10 – х и 15 – у тонн сырья. Так как общее количество имеющегося на складах сырья совпадает с потребностью заводов, т. е. всё сырьё должно быть вывезено со складов на заводы, то после обеспечения заводов З1 и З2 оставшееся на складах сырьё полностью вывозится на завод З3, т. е. со склада С1 на завод З3 вывозится 20 – х – у, а со склада С2 25 – (10 – х) – (15 – у) = х + у тонн.
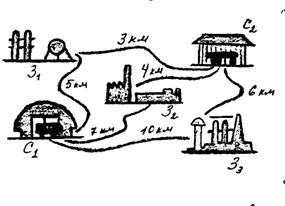
Рис. 35
Учитывая расстояния (рис. 35), находим общее число тонно-километров:
5х + 7у + 10(20 – х – у) + 3(10 – х) – (15 – у) + 6(х + у) = 290 – 2х – у.
Заметим теперь, что все величины, выражающие количество перевозимого по разным дорогам сырья, неотрицательны:
![]() .
.
Каждое из этих неравенств определяет в системе координат х, у полуплоскость, а система всех неравенств определяет пересечение этих полуплоскостей, т. е. выпуклый многоугольник Q (рис. 36). Заметим, что последнее неравенство можно отбросить: оно является следствием первых двух.
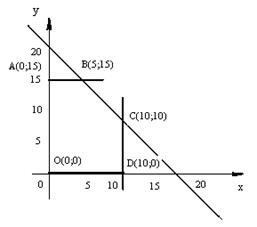
Рис. 36
Таким образом, задача о нахождении наиболее выгодного варианта перевозок сводится математически к нахождению точки М(х, у) многоугольника Q, в который функция 290 – 2х – у достигает наименьшего значения. Вместо этой функции можно рассматривать функцию – 2х – у.
Действительно, если будет найдено наименьшее значение функции – 2х – у на многоугольнике Q, то прибавив к этому значению 290, получим наименьшее значение функции 290 – 2х – у. На рисунке 37 показано, что наименьшее значение линейной функции, рассматриваемой на многоугольнике Q, достигается в вершине С. Иначе говоря, наиболее выгодный вариант перевозок соответствует точке С(10; 10), т. е. х = 10, у = 10. Общее количество тонно-километров для этих значений х, у равно 290 – 2·10 – 10 = 260. Видно, геометрическая модель позволила полностью решить поставленную задачу.
 Рис. 37
Рис. 37
В рассмотренной задаче все объёмы перевозок со складов на заводы удалось выразить через две переменные х, у. Это позволило дать геометрическую интерпретацию получившейся системы неравенств на координатной плоскости. Допустим, однако, что при тех же двух складах число заводов равно четырём с потребностью в сырье соответственно 8, 10, 12 и 15 т. Тогда нужно будет ввести три переменные x, y, z, обозначающие количество сырья, вывозимого со склада С1 на первые три завода. Если задать расстояния со складов до заводов, то можно будет составить выражение для общего числа тонно-километров. Можно написать и неравенства, выражающие неотрицательность количества сырья, вывозимого со складов на заводы. Теперь эти неравенства будут зависеть от трёх переменных x, y, z. Каждое из этих неравенств задаёт полупространство, а система всех неравенств определяет пересечение полупространств, т. е. выпуклый многогранник в трёхмерном пространстве.
Таким образом, для четырёх заводов задача о перевозке сырья будет математически формулироваться как задача о наименьшем значении линейной функции на трёхмерном выпуклом многограннике.
Для двух складов и пяти заводов (при сохранении того условия, что всё сырьё должно быть вывезено полностью) потребуются уже четыре переменные, обозначающие количество сырья, вывозимого со склада С1 на первые четыре завода. Теперь мы будем иметь неравенства с четырьмя переменными, и для получения геометрической интерпретации потребуется четырёхмерное пространство, а при большем числе складов и заводов – пространство ещё большей размерности.
§ 11. Пространство-время классической механики
Аналогия между пространством и временем была известна ещё древним грекам. Аристотель включал время в число непрерывных величин наряду с линиями, поверхностями и телами. Однако впервые рассматривал время как координату наряду с пространственными координатами Галилей.
Время систематически рассматривалось в качестве координаты в теоретической механике.
Будем характеризовать положение материальной точки в пространстве в данный момент времени пространственными координатами хi ( i = 1, 2, 3) и временной координатой t. В классической механике Галилея-Ньютона переход от исходной системы координат хi, t к другой системе, движущейся относительно неё прямолинейно и равномерно определяется формулами
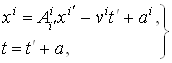
где ![]() - координаты вектора
движения первой системы по отношению ко второй. Формулы показывают, что если
при переходе от одной системы координат к другой системе, движущейся по
отношению к ней, пространственные координаты во второй системе выражаются не
только через пространственные координаты в первой системе, но и через временную
координату в этой системе, то временные координаты во второй системе могут
отличаться от временных координат в первой системе только изменением начала
отсчёта, т. е. время в механике Галилея-Ньютона абсолютно.
- координаты вектора
движения первой системы по отношению ко второй. Формулы показывают, что если
при переходе от одной системы координат к другой системе, движущейся по
отношению к ней, пространственные координаты во второй системе выражаются не
только через пространственные координаты в первой системе, но и через временную
координату в этой системе, то временные координаты во второй системе могут
отличаться от временных координат в первой системе только изменением начала
отсчёта, т. е. время в механике Галилея-Ньютона абсолютно.
Механика Галилея-Ньютона хорошо согласуется с практикой при малых скоростях, но при больших скоростях, сравнимых со скоростью света, эта механика заметно расходится с практикой; согласно механике Галилея-Ньютона, если скорость света по отношению к некоторой системе координат равна с, то по отношению к системе координат, движущейся в том же или обратном направлении со скоростью v, эта скорость соответственно должна быть равна c – v или c + v. Но, как показывает эксперимент, скорость света одна и та же по отношению ко всем системам координат, движущихся друг относительно друга прямолинейно и равномерно. Если скорость v, во много раз меньше скорости с, скорости c – v и c + v практически неотличимы от скорости с, но в случае, когда скорость v сравнима со скоростью с, отличие скорости света от скоростей c – v и c + v легко заметить.
§ 12. Пространство-время специальной теории относительности
Для того чтобы выполнялось условие постоянства скорости света для всех систем координат, движущихся равномерно и прямолинейно друг относительно друга, достаточно, чтобы для всех таких систем прямоугольных координат выполнялось соотношение
то есть
![]() (12. 1)
(12. 1)
Это условие не может быть
выполнено в механике Галилея-Ньютона, где координата ![]() не может зависеть от
координаты
не может зависеть от
координаты ![]() . Для того чтобы
удовлетворить этому условию, следует отказаться от понятия об абсолютном
времени и принять, что пространство и время – не изолированные друг от друга
формы существования материи, а две стороны существования одной и той же формы.
. Для того чтобы
удовлетворить этому условию, следует отказаться от понятия об абсолютном
времени и принять, что пространство и время – не изолированные друг от друга
формы существования материи, а две стороны существования одной и той же формы.
Этому условию удовлетворяет механика специальной теории относительности Энштейна, дающая при скоростях, сравнимых со скоростью света, значительно большее согласие с практикой, чем механика Галилея-Ньютона. Если мы обозначим произведение ct, имеющее размерность длины через х4, то, согласно специальной теории относительности, при переходе от одной системы координат к другой такой системе, движущейся относительно неё равномерно и прямолинейно, координаты хi (i = 1, 2, 3, 4) преобразуются по закону
![]() (12. 2)
(12. 2)
причём
![]() (12. 3)
(12. 3)
где ![]() ,
, ![]() .
.
Формула (12.2) совпадает
с формулой преобразования прямоугольных координат обычного n – пространства при n = 4, но формула (12. 3) отличается
от соответственного условия в 4-пространстве, в котором ![]() .
.
Поэтому в случае
специальной теории относительности можно по аналогии с обычным 4-пространством
определить в 4-пространстве, точки которого определяют положения материальных
точек в разные моменты времени, расстояния между точками, считая за расстояние
между точками М1 и М2 с координатами ![]() и
и ![]() квадратный корень из
выражения
квадратный корень из
выражения ![]() . Определённое таким
образом расстояние может быть как вещественным, так и чисто мнимым и равным
нулю. В первом случае существует такая система координат, в которой точки М1
и М2 одновременны и расстояние М1М2
равно обычному расстоянию между ними в этой системе координат. Во втором случае
существует такая система координат, в которой эти точки имеют одинаковые
пространственные координаты и расстояние М1М2
равно произведению ic
на отрезок времени между этими точками в этой системе координат. В третьем
случае М1М2 = 0 и точки М1
и М2 можно соединить лучом света.
. Определённое таким
образом расстояние может быть как вещественным, так и чисто мнимым и равным
нулю. В первом случае существует такая система координат, в которой точки М1
и М2 одновременны и расстояние М1М2
равно обычному расстоянию между ними в этой системе координат. Во втором случае
существует такая система координат, в которой эти точки имеют одинаковые
пространственные координаты и расстояние М1М2
равно произведению ic
на отрезок времени между этими точками в этой системе координат. В третьем
случае М1М2 = 0 и точки М1
и М2 можно соединить лучом света.
Определённое нами
4-пространство называют пространством Минковского. Преобразования (12.2) при ![]() , удовлетворяющие условиям
(12. 3), называют преобразованиями Лоренца.
, удовлетворяющие условиям
(12. 3), называют преобразованиями Лоренца.
Этот пример показывает плодотворность понятия 4-пространства, указывает на необходимость расширения понятия евклидова n-пространства в сторону отказа от знакоопределённости квадратичной формы, выражающей скалярный квадрат вектора х в функции его координат.
§ 13. Пространство-время общей теории относительности
Описание пространства-времени с помощью псевдоевклидова 4-пространства индекса 3 в специальной теории относительности, согласующееся с практикой лучше, чем описание пространства-времени в классической механике, является только приближённым описанием пространства-времени. Следующее приближение было предложено самим Энштейном в его общей теории относительности. Согласно этой теории пространство-время является псевдоримановым 4-пространством индекса 3, кривизна в 2-мерных направлениях которого больше там, где больше плотность материи. Таким образом, не только пространство и время оказываются взаимозависимыми, но их свойства оказываются зависящими от материи, формой существования которой они являются.
Из того, что в малой области геометрия псевдоримановых пространств близка к геометрии псевдоевклидова пространства, образованного векторами в одной из точек этой области, видно, что специальная теория относительности хорошо согласуется с практикой в сравнительно небольших областях пространства-времени, а в больших областях проявляются свойства, описываемые общей теорией относительности.
Хотя с прогрессом науки мы узнаём свойства всё больших областей пространства-времени, известная нам часть вселенной остаётся ограниченной и по свойствам этой части мира мы можем судить о геометрических свойствах мирового пространства-времени в целом только в порядке грубого приближения.
Наиболее грубое приближение к картине мирового пространства-времени в целом мы получим, если предположим, что материя распределена в пространстве–времени совершенно равномерно и, следовательно, пространство-время представляет собой псевдориманово 4-пространство индекса 3 постоянной кривизны. Если мы представим себе такое пространство в виде сферы вещественного или мнимого радиуса в псевдоевклидовом 5-пространстве соответственно индекса 4 или 3, а поверхности t =const также в порядке грубого приближения представим себе сечениями этой сферы параллельными плоскостями, то с течением времени «пространственное сечение» мира уменьшается или расширяется в зависимости от положения секущей плоскости. В первом случае кривизна «пространственного сечения» - постоянная положительная, во втором случае – постоянная отрицательная.
а) б)
Рис. 38
На рис. 38 изображены трёхмерные аналоги сфер вещественного и мнимого радиуса в псевдоевклидовом 5-пространстве. Изложенная картина мира с первого взгляда кажется неправдоподобной, но она подтверждается астрономическими наблюдениями, свидетельствующими о расширении известной нам вселенной. Это подтверждение указывает на возможность того, что реальное пространство-время, является псевдоримановым пространством переменной кривизны, соответствует этой картине мира «в среднем».
Заключение
Изучение k-мерного пространства весьма полезно как для уяснения многих закономерностей геометрии обычного пространства, являющегося частным случаем k-мерного пространства при k = 3, так и для более наглядного представления многих закономерностей алгебры, геометрии и анализа, связанных с уравнениями с k неизвестными.
Соотношения k-мерной геометрии находят применение и при решении транспортных задач о составлении оптимального способа перевозки грузов и т. д.
В данной работе были рассмотрены многомерные геометрические образы в k-мерных пространствах и четырёхмерное пространство, которое наши глаза никогда не видели. Также исследовались четырёхмерные предметы пространства. На основе изложенного материала исследовали необходимость введения многомерного пространства системы, заданной k-параметрами, в которой появляются понятия k-мерной линии плоскости.
Литература
1. Александров А. Д., Нецветаева Н. Ю. Геометрия. – М.: Наука, 1990.
2. Атанасян Л. С. Геометрия. ч. 2 – М., 1987.
3. Базылев В. Т. и др. Геометрия. Учеб. Пособие для студентов физ.-мат. Факультетов пед. институтов – М.: «Просвещение», 1975.
4. Вигнер Е. Непостижимая эффективность математики в естественных науках // УФН. – 1968. – Т. 94, вып. 3.
5. Гельфанд И. М., Глаголева Е. Г., Кириллов Н. А. Метод координат. Изд. 3 – М.: Наука, 1968.
6. Гордевский Д. З. Популярное введение в многомерную геометрию. – Харьков: Изд-во Харьк. ун-та, 1964.
7. Ефимов Н. В., Розендорн Э. Р. Линейная алгебра и многомерная геометрия. – М.: Наука, 1970.
8. Манин Ю. И. Новые размерности в геометрии // Успехи мат. Наук, 1984, т. 39, вып. 6.
9. Моденов Л. С. Аналитическая геометрия. – М., 1969.
10. Парнасский И. В. Многомерные пространства. – М.: Наука, 1978.
11. Понтрягин Л. С. Знакомство с высшей математикой. - Изд. 2. – М.: Наука, 1987.
12. Прохоров Ю. В. Большой энциклопедический словарь по математике. – М.: Науч. издат., 1998.
13. Розенфельд Б. А. Многомерные пространства. – М.: Наука, 1966.
14. Сазанов А. А. Четырёхмерный мир Минковского. – М.: Наука, 1988.
15. Стрингхем П. Г. Правильные фигуры в n-мерном пространстве. Под ред. Фаге, Успехи математических наук, вып. 10 – М., 1954.
16. Хлопонина Э. П. Аналитическая геометрия аффинных и евклидовых пространств: Учебное пособие, ч. 1 – Ставрополь: Изд-во СГУ, 1998.