
Рефераты по авиации и космонавтике
Рефераты по административному праву
Рефераты по безопасности жизнедеятельности
Рефераты по арбитражному процессу
Рефераты по архитектуре
Рефераты по астрономии
Рефераты по банковскому делу
Рефераты по сексологии
Рефераты по информатике программированию
Рефераты по биологии
Рефераты по экономике
Рефераты по москвоведению
Рефераты по экологии
Краткое содержание произведений
Рефераты по физкультуре и спорту
Топики по английскому языку
Рефераты по математике
Рефераты по музыке
Остальные рефераты
Рефераты по биржевому делу
Рефераты по ботанике и сельскому хозяйству
Рефераты по бухгалтерскому учету и аудиту
Рефераты по валютным отношениям
Рефераты по ветеринарии
Рефераты для военной кафедры
Рефераты по географии
Рефераты по геодезии
Рефераты по геологии
Рефераты по геополитике
Рефераты по государству и праву
Рефераты по гражданскому праву и процессу
Рефераты по кредитованию
Рефераты по естествознанию
Рефераты по истории техники
Рефераты по журналистике
Рефераты по зоологии
Рефераты по инвестициям
Рефераты по информатике
Исторические личности
Рефераты по кибернетике
Рефераты по коммуникации и связи
Рефераты по косметологии
Рефераты по криминалистике
Рефераты по криминологии
Рефераты по науке и технике
Рефераты по кулинарии
Рефераты по культурологии
Контрольная работа: Формати кадрів технології PDH
Контрольная работа: Формати кадрів технології PDH
Міністерство освіти та науки України
Луцький інститут розвитку людини ВМУРоЛ «Україна»
Кафедра комп’ютерних технологій
01/05КНз
Варіант – 4
Контрольна робота
з дисципліни:
«Високошвидкісні технології
комп’ютерних мереж»
Виконав:ст.гр.КНз – 5.1
Перевірив: викладач
Луцьк 2010р.
План
1.Формати кадрів технології PDH.
2.Фізичний рівень технології Fast Ethernet.
Список використаної літератури.
1.Формати кадрів технології PDH
Існує два покоління технологій цифрових первинних мереж – технологія плезіохронной («плезіо» означає «майже», тобто майже синхронною) цифрової ієрархії (Plesiochronous Digital Hierarchy, PDH) і пізніша технологія – синхронна цифрова ієрархія (Synchronous Digital Hierarchy, SDH). У Америці технології SDH відповідає стандарт SONET
Технологія синхронної цифрової ієрархії спочатку була розроблена компанією Bellcore під назвою «Синхронні оптичні мережі» – Synchronous Optical NETs, SONET. Ця технологія була розвитком технології PDH, яка з’явилася в 60-і роки для побудови якісних і щодо недорогих цифрових каналів між телефонними станціями. PDH довгий час добре справлялася з своїми обов’язками як магістральна технологія, надаючи користувачам канали Т1 (1,5 Мбіт/с) і ТЗ (45 Мбіт/с) в американському варіанті або канали Е1 (2 Мбіт/с), ЕЗ (34 Мбіт/с) і Е4 (140 Мбіт/с) в європейському і міжнародному варіантах. Швидкий розвиток телекомунікаційних технологій привів до необхідності розширення ієрархії швидкостей PDH і використанні всіх можливостей, які надавало нове середовище – волоконно-оптичні лінії зв’язку.
Одночасно з підвищенням верхньої межі лінійки швидкостей потрібно було звільнитися від недоліків PDH, які виявилися за час експлуатації цих мереж. Одним з основних недоліків PDH є, перш за все, принципова неможливість виділення окремого низькошвидкісного потоку з високошвидкісного без повного демультиплексування останнього. Крім того, в технології PDH не були передбачені вбудовані засоби забезпечення відмовостійкості і управління мережею.
Всі ці недоліки були враховані і подолані розробниками технології SONET. Перший варіант стандарту технології SONET з’явився в 1984 році. Потім ця технологія була стандартізована комітетом Tl ANSI. Міжнародна стандартизація технології проходила під егідою Європейського інституту телекомунікаційних стандартів (ETSI) і CCITT, спільно з ANSI і провідними телекомунікаційними компаніями Америки, Європи і Японії. Основною метою розробників міжнародного стандарту було створення такої технології, яка б дозволяла передавати трафік всіх існуючих цифрових каналів рівня PDH (як американських Т1-ТЗ, так і європейських Е1-Е4) в рамках високошвидкісної магістральної мережі, що використовує волоконно-оптичні кабелі, і забезпечила б ієрархію швидкостей, що продовжує ієрархію технології PDH до швидкості в декілька Гбіт/с.
Звичайний канал, що виділяється телефонними мережами для одного з'єднання, має смугу пропускання 4 кГц, достатню для прийнятної передачі людської мови. Відповідно, характеристики базового цифрового каналу вибиралися так, щоб поодинці такому каналу можна було передавати дані одного телефонного з'єднання. Відповідно до теореми Котельникова-Найквіста, для того, щоб було можна відновити початковий сигнал, частота дискретизації повинна бути не менше 2*4 кГц = 8 кГц. Для прийнятного представлення людській мові досить 12-ти біт на відлік, що відповідає 4096-ти різним рівням сигналу, а логарифмічне перетворення дозволяє понизити розрядність відліків до 8-ми біт, зберігаючи суб'єктивну якість сигналу. Логарифм є позитивною функцією тільки при аргументі, що перевищує одиницю, відповідно, для діапазону аргументів від 0 до 1 необхідно використовувати якусь іншу функцію. У Європі і США використовують різні перетворення - A-залежність і е-залежність відповідно. У Європі для «малих» аргументів використовують лінійну функцію у ~ Ах, а для «великих» - безпосередньо логарифмічну: у = (1+ln A x)/(1+ln A), де A = 87,6. У США зрушують графік функції на одиницю у бік осі ординат: у ~ log(1+ еx). Оскільки кількість різних аргументів невелика (4096), на практиці не обчислюють для кожного відліку відповідний логарифм, а зберігають наперед підготовлену таблицю відповідностей аргументів і значень функції.
Звичайний мультиплексор T1 має 24 аналогових канали і один цифровий. Він постійно перебирає аналогові канали (звертаючись до кожного з них 8000 разів в секунду, тобто з частотою 8 кГц), оцифровує аналогові дані (телефонні розмови), що поступають, по 12 біт на відлік, виконує логарифмічне перетворення і видає отриманий байт даних в цифровий канал. Цей єдиний байт складає кадр DS-0. Час, що відводиться на передачу одного байта, що належить одному аналоговому каналу, називається таймслотом (англ. timeslot часовий інтервал). Окремий таймслот відводиться для синхронізації. У Т1 для синхронізації використовується один біт (F-біт, англ. Framing bit) по черзі нуль і одиниця. Таким чином, поодинці цифровому каналу T1 передаються 24 базових голосових канали, а група, що складається з 24 байт і F-біта, називається кадром DS-1. За одну секунду передається 8000 кадрів DS-1. Сумарна швидкість каналу T1 складає (24*8+1)*8=1544 Кбіт/с. Якщо по якому-небудь з аналогових каналів не поступають дані, його таймслот залишається закріпленим за ним, відповідно, частина пропускної спроможності цифрового каналу витрачається даремно. Демультиплексор T1 виконує зворотне завдання - в нього поступає потік кадрів DS-1, з яких він витягує по одному байту для кожного з 24-х аналогових каналів, виконує цифро-аналогове перетворення і видає його результат в канал. Інформація, що управляє, в T1 передається молодшим розрядом байтів даних (оскільки байт є значенням виміру голосу, було визнано, що спотворення молодшого розряду не повинне бути відмічене слухачем). У ранніх версіях молодший біт кожного байта був службовим, фактично передавалися 7-бітові байти, а швидкість передачі призначених для користувача даних складала 56 Кбіт/с. Потім для службових цілей використовувався тільки кожен шостий кадр: у п'яти кадрах в кожному байті передаються вісім біт призначених для користувача даних, а в шостому - тільки сім. Чотири канали T1 об'єднуються в канал T2 (наступний рівень ієрархії PDH), сім каналів T2 - в T3, шість каналів T3 - в T4. Апаратура T1, T2, T3 і T4 може взаємодіяти, утворюючи мережу з ієрархією каналів. Кадр DS-2 складається з чотирьох кадрів DS-1, розділених F-бітами, а самі кадри DS-2 розділяються 12 службовими синхробітамі. Пізніше ця технологія (з деякими відмінностями від оригінального варіанту) була стандартизована ITU-T (у той час CCITT). У Америці, Канаді і Японії використовується початкова американська версія, а в Європі - стандарт ITU-T. Базовий канал в обох версіях має швидкість 64 Кбіт/с. Основна відмінність європейських каналів - в кратності входження низькошвидкісних каналів в канал наступного рівня, і, відповідно, їх швидкості. Канал E1 звичайний(аналог T1) складається з 30 базових каналів, канал E2 - з 4 каналів E1, канал E3 - з 4 каналів E2, а канал E4 - з 4 каналів E3. Стандарт ITU-T (G.700-G.706) відмовився від використання окремих розрядів байтів призначених для користувача даних для передачі службової інформації. Кадр DS-1, який передається по каналу E1, складається з 30 байт призначених для користувача даних (по одному з кожного базового каналу) і 2 службових байт. Сумарна швидкість складає 32*8*8=2048 Кбіт/с. У технології PDH (стандарт ITU-T G.704) всі рівні швидкостей (і формати кадрів для цих рівнів) називаються DS-n, де n - номер рівня (DS - від англ. Digital Signal, цифровий сигнал).
Основна проблема при використанні PDH - складність виділення (демультиплексування) призначених для користувача каналів. Це пов'язано з використанням службових біт синхронізації між кадрами. Якщо потрібно виділити один базовий канал з кадрів каналу T3, потрібно провести повне демультиплексування в кадри T2, кадр T2 - в кадри T1, а з кадру T1 виділити дані одного базового каналу. Для зменшення кількості операцій мультиплексування використовуються спеціальні прийоми, що ускладнюють роботу мережі і що вимагають спеціальної настройки.
Інший недолік PDH - слабкі засоби управління мережею недостатня кількість інформації про стан каналу, відсутність процедур підтримки відмовостійкої.
Нарешті, межа швидкості технології PDH - 274 Мбіт/с (T4) і 139Мбіт/с (E4), в той час, як сучасні кабелі дозволяють передавати дані з швидкостями на порядок вище.
2.Фізичний рівень технології Fast Ethernet
Fast Ethernet (Швидкий Ethernet) - термін, що описує набір стандартів Ethernet для пакетної передачі даних з номінальною швидкістю 100 Мбіт/с, що в 10 разів швидше за початкову для Ethernet швидкість у 10 Мбіт/с. На сьогодні існують швидші в 10 (Gigabit Ethernet) і 100 (10 Gigabit Ethernet) разів стандарти технології Ethernet. 3.6.1.
Ідея технології Fast Ethernet народилася в 1992 році. У серпні наступного року група виробників об'єдналася в Союз Fast Ethernet (Fast Ethernet Alliance, FEA). Метою FEA було якнайскоріше дістати формальне схвалення Fast Ethernet від комітету 802.3 Інституту інженерів з електротехніки і радіоелектроніки (Institute of Electrical and Electronic Engineers, IEEE), оскільки саме цей комітет займається стандартами для Ethernet. Успіх супроводив новій технології і підтримуючому її альянсу: у червні 1995 року всі формальні процедури були завершені, і технології Fast Ethernet привласнили найменування 802.3u.
Всі відмінності технології Fast Ethernet від Ethernet зосереджені на фізичному рівні (мал. 1). Рівні MAC і LLC у Fast Ethernet залишилися абсолютно тими ж, і їх описують колишні глави стандартів 802.3 і 802.2. Тому розглядаючи технологію Fast Ethernet, розглянемо тільки кілька варіантів її фізичного рівня.
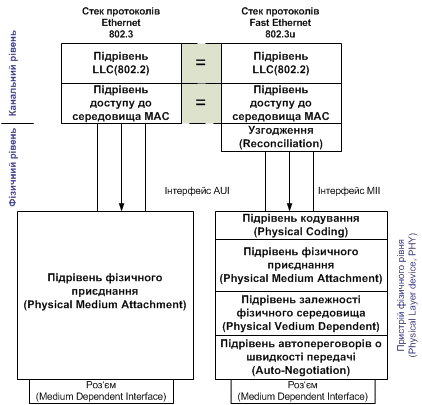
Більш складна структура фізичного рівня технології Fast Ethernet викликана тим, що в ній використовуються три варіанти кабельних систем:
· волоконно-оптичний багатомодовый кабель, використовуються два волокна;
· кручена пара категорії 5, використовуються дві пари;
· кручена пара категорії 3, використовуються чотири пари.
Коаксіальний кабель, що дав світу першу мережу Ethernet, у число дозволених середовищ передачі даних нової технології Fast Ethernet не потрапив.
Офіційний стандарт 802.3u встановив три різних специфікації для фізичного рівня Fast Ethernet і дав їм наступні назви :
· Фізичний рівень 100Base-FX - багатомодове оптоволокно, два волокна ;
· Фізичний рівень 100Base-TX - кручена пара UTP Cat 5 чи STP Type 1, дві пари ;
· Фізичний рівень 100Base-T4 - кручена пара UTP Cat 3, чотири пари.
Для всіх трьох стандартів справедливі наступні твердження і характеристики. Формати кадрів технології Fast Ethernet не відрізняються від форматів кадрів технологій 10-мегабітного Ethernet. Міжкадровий інтервал (IPG) дорівнює 0,96 мкс, а бітовий інтервал дорівнює 10 нс. Усі тимчасові параметри алгоритму доступу (інтервал відстрочки, час передачі кадру мінімальної довжини і т.п.), вимірюються в бітових інтервалах, залишилися старими, тому зміни в розділи стандарту, що стосуються рівня MAC, не вносилися. Ознакою вільного стану середовища є передача по ньому символу Idle відповідного надлишкового коду (а не відсутність сигналів, як у стандартах Ethernet 10 Мбіт/с).
Хоча Fast Ethernet і є продовженням стандарту Ethernet, перехід від мережі 10BaseT до 100BaseT не можна розглядати як механічну заміну устаткування - для цього можуть бути потрібно зміни в топології мережі.
Теоретична межа діаметру сегменту мережі Fast Ethernet складає 250 метрів; це всього лише 10 відсотків теоретичної межі розміру мережі Ethernet (2500 метрів). Дане обмеження виникає з характеру протоколу CSMA/CD і швидкості передачі 100Мбіт/с. Як вже наголошувалося раніше, передаючи дані робоча станція повинна прослуховувати мережу протягом часу, що дозволяє переконатися в тому, що дані досягли станції призначення. У мережі Ethernet з пропускною спроможністю 10 Мбіт/с (наприклад 10Base5) проміжок часу, необхідний робочій станції для прослуховування мережі на предмет конфлікту, визначається відстанню, яку 512-бітовий кадр (розмір кадру заданий в стандарті Ethernet) пройде за час обробки цього кадру на робочій станції. Для мережі Ethernet з пропускною спроможністю 10 Мбіт/с ця відстань рівна 2500 метрів .
З іншого боку, той же самий 512-бітовий кадр (стандарт 802.3u задає кадр того ж розміру, що і 802.3, тобто в 512 біт), передаваний робочою станцією в мережі Fast Ethernet, пройде всього 250 м, перш ніж робоча станція завершить його обробку . Якби приймаюча станція була віддалена від передавальної станції на відстань понад 250 м, то кадр міг би вступити в конфлікт з іншим кадром на лінії де-небудь далі, а передавальна станція, завершивши передачу, вже не сприйняла б цей конфлікт. Тому максимальний діаметр мережі 100BaseT складає 250 метрів.
Щоб використовувати допустиму дистанцію, буде потрібно два повторювача для з'єднання всіх вузлів. Згідно стандарту, максимальна відстань між вузлом і повторювачем складає 100 метрів; у Fast Ethernet, як і в 10BaseT, відстань між концентратором і робочою станцією не повинна перевищувати 100метров. Оскільки сполучні пристрої (повторювачі) вносять додаткові затримки, реальна робоча відстань між вузлами може опинитися ще менше. Тому представляється розумним брати всі відстані з деяким запасом. Для роботи на великих відстанях доведеться придбати оптичний кабель. Наприклад, устаткування 100BaseFX в напівдуплексному режимі дозволяє з'єднати комутатор з іншим комутатором або кінцевою станцією, що знаходиться на відстані до 450 метрів один від одного. Встановивши повнодуплексний 100BaseFX, можна з'єднати два мережеві пристрої на відстані до двох кілометрів.
Підсумовуючи все вищесказане, відмітимо, що, як нам здається, Fast Ethernet найбільш хороший для вирішення проблем високих пікових навантажень. Наприклад, якщо хтось з користувачів працює з САПР або програмами обробки зображень і потребує підвищення пропускної спроможності, то Fast Ethernet може виявитися хорошим виходом з положення. Проте якщо проблеми викликані надмірним числом користувачів в мережі, то 100BaseT починає гальмувати обмін інформацією при приблизно 50-процентному завантаженні мережі іншими словами, на тому ж рівні, що і 10BaseT. Але врешті-решт, адже це не більше ніж розширення 10BaseT.
Використана література
1. Олифер В.Г., Олифер Н.А. Компьютерные сети. Принципы, технологии, протоколы: Підручник для вузів. 3-є вид. — СПб: Питер, 2005. — 960 с.
2. Волков А.Н., Кузин А.В., Пескова С.А. Сети и телекоммуникации. — М.: Academia, 2006. — 352с.
3. Галкин В.А., Григорьев Ю.А. Телекоммуникации и сети. — М.: МГТУ им Н.Э.Баумана, 2003. — 608с.
4. Руководство по технологиям объединенных сетей. 4-е вид. — М.: Вильямс, 2005. — 1040с.
5. Слепов Н. Н. Принципы плезиохронной и синхронной цифровых иерархий (PDH и SDH)// Сети. 1995. ы 9. С. 90