
Рефераты по авиации и космонавтике
Рефераты по административному праву
Рефераты по безопасности жизнедеятельности
Рефераты по арбитражному процессу
Рефераты по архитектуре
Рефераты по астрономии
Рефераты по банковскому делу
Рефераты по сексологии
Рефераты по информатике программированию
Рефераты по биологии
Рефераты по экономике
Рефераты по москвоведению
Рефераты по экологии
Краткое содержание произведений
Рефераты по физкультуре и спорту
Топики по английскому языку
Рефераты по математике
Рефераты по музыке
Остальные рефераты
Рефераты по биржевому делу
Рефераты по ботанике и сельскому хозяйству
Рефераты по бухгалтерскому учету и аудиту
Рефераты по валютным отношениям
Рефераты по ветеринарии
Рефераты для военной кафедры
Рефераты по географии
Рефераты по геодезии
Рефераты по геологии
Рефераты по геополитике
Рефераты по государству и праву
Рефераты по гражданскому праву и процессу
Рефераты по кредитованию
Рефераты по естествознанию
Рефераты по истории техники
Рефераты по журналистике
Рефераты по зоологии
Рефераты по инвестициям
Рефераты по информатике
Исторические личности
Рефераты по кибернетике
Рефераты по коммуникации и связи
Рефераты по косметологии
Рефераты по криминалистике
Рефераты по криминологии
Рефераты по науке и технике
Рефераты по кулинарии
Рефераты по культурологии
Курсовая работа: Разработка передающего полукомплекта ТУ
Курсовая работа: Разработка передающего полукомплекта ТУ
КУРСОВАЯ РАБОТА
по дисциплине: автоматизация систем электроснабжения
"Разработка передающего полукомплекта ТУ"
Реферат
В данном курсовом проекте выбран наиболее рациональный способ кодирования сообщений, определена частота мультивибратора, определена наибольшая, возможной удаленности пункта приема сообщений. Составлена структурная схема технических средств автоматизированной системы управления тяговыми подстанциями, а так же упрощенная схема передачи информации в системе телемеханики. Рассмотрена схема рекомендуемых форматов телемеханики и классы достоверности стандартные форматы телемеханики. Выбран протокол MODBUS и рассмотрена структура байта Modbus. Рассмотрена функциональная схема шкафа КП-М (ПС). Выбран мультиплексор ТС16/ТУ8 и рассмотрена его функциональная схема. Рассмотрен Модем-УКП.
Курсовая работа содержит 4 таблицы и 20 схем.
Содержание
Введение
Исходные данные
Выбор рационального способа кодирования сообщений
Определение расчетной частоты мультивибратора полукомплекта
Определение наибольшей, возможной удаленности пункта приема сообщений
Особенности системы АСТМУ-А
Интерфейсы и протоколы
Передача информации в телемеханических системах
Стандартные форматы телемеханических систем
Протокол MODBUS
Базовый состав оборудования кп системы астму-а
Мультиплексор ТУ8/ТС16
Модем-УКП
Общие сведения об организации опроса контролируемых пунктов
Библиографический список
Введение
С увеличением расстояния передачи, объёма информации и числа контролируемых объектов особое значение приобретает необходимость сокращения затрат на линии связи, обеспечения качества передачи сигналов и быстродействия системы передачи. Эти проблемы решаются с помощью устройств автоматики и телемеханики, позволяющие наиболее рационально использовать линии связи и одновременно обеспечить надежную, быструю и точную передачу приказов, сигналов и результатов измерений.
Автоматика - техника управления и контроля в пределах небольших расстоянии.
Телемеханика - техника управления, контроля и регулирования производственными или технологическими процессами при наличии больших расстояний, для преодоления которых применяют специальные средства.
Первый опытный телемеханизированный участок Москва-Раменское был введен в эксплуатацию в 1952 г. До 1959 г. Система телемеханики была внедрена на ряде электрифицированных участков железных дорог протяженностью около тысячи километров.
В данном курсовом проекте рассматривается автоматизированная система телемеханического управления АСТМУ-А, применяемая на электрифицированных железных дорогах. Данная система телемеханики разрабатывалась при заданных ресурсных ограничениях с учетом тенденции применения современных коммуникационных технологий в системах управления и мониторинга, как железных дорог, так и электроэнергетики.
Создана первичная магистральная цифровая сеть связи и первичная сеть связи технологического (дорожного) сегмента, содержащая около четырех тысяч узлов ОТН, которая закрыта от несанкционированного доступа и обеспечивает работу в режиме реального времени устройств автоматики и телемеханики, и центров диспетчерского управления. СПД ОТН обеспечивает функционирование информационно-управляющей системы контроля и управления объектами электроснабжения и контактной сети.
На базе первичных сетей созданы вторичные сети, обеспечивающие оперативно-технологическую связь ОТС (включая диспетчерскую связь), общетехнологическую телефонную связь ОбТС, сеть передачи данных СПД. Отдельно выделена сеть передачи данных оперативно-технологического назначения СПД
Исходные данные
Вариант 044
| Полукомплект телеуправления | - передающий полукомплект. | |||||||||
| Полукомплект телесигнализации | - приемный полукомплект. | |||||||||
| Несущая частота канала связи | - 3150 Гц. | |||||||||
| Пропускная способность линии | - 21 имп/сек. | |||||||||
| Режим, для которого строится временная диаграмма | ||||||||||
| Передающий полукомплект | Передача приказа. | |||||||||
| Приемный полукомплект | Приём приказа | |||||||||
| Вид модуляции | - частотная | |||||||||
| Тип линии связи |
- воздушная (Б/М, диам.5мм, провод СТ, расст. м/у проводами 20 см) |
|||||||||
| Уровень помех | - ( - 8) Нп | |||||||||
| Затухание сигнала, вносимое аппаратурой канала | 0,4 Нп/км |
|
||||||||
| Число объектов на КП | - 45 | |||||||||
| Допустимое время передачи | - 2,2 сек. | |||||||||
| Число серий при передачи приказа | - однократная | |||||||||
|
Километрическое затухание α, 10-3 дБ/км |
- 12,8 | |||||||||
| Число контролируемых пунктов | - 15 | |||||||||
Выбор рационального способа кодирования сообщений
Передача команд телеуправления осуществляется по одному общему для всех контролируемых пунктов каналу связи, т.е. устройства телеуправления имеют один общий передающий полукомплект и индивидуальные приемные.
Импульсный признак - временной.
Кодирование сообщений осуществляется с учетом следующих требований:
1. Помехоустойчивость;
2. Малое число элементов для передачи сообщений;
3. Простой способ для получения кодов;
4. Удовлетворительные параметры передачи (скорость передачи).
Для повышения помехоустойчивости за счет выбора из общего возможного числа комбинаций, таких, которые отличаются друг от друга не менее, чем двумя элементами. Число сочетаний из n элементов по m определяется по формуле:
![]() , где
, где
n - общее число элементов;
m - число элементов отличающихся от других (n - m) своим признаком или местом в общем порядке элементов.
Число контролируемых пунктов 15 - кодируем кодом:
![]()
Таблица 1.1 Импульсы выбора контролируемых пунктов
| Номер импульса | Номер контролируемого пункта | ||||||||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | |
| 2 |
1 |
1 |
1 |
1 |
1 |
0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 3 |
1 |
0 | 0 | 0 | 0 |
1 |
1 |
1 |
1 |
0 | 0 | 0 | 0 | 0 | 0 |
| 4 | 0 |
1 |
0 | 0 | 0 |
1 |
0 | 0 | 0 |
1 |
1 |
1 |
0 | 0 | 0 |
| 5 | 0 | 0 |
1 |
0 | 0 | 0 |
1 |
0 | 0 |
1 |
0 | 0 |
1 |
1 |
0 |
| 6 | 0 | 0 | 0 |
1 |
0 | 0 | 0 |
1 |
0 | 0 |
1 |
0 |
1 |
0 |
1 |
| 7 | 0 | 0 | 0 | 0 |
1 |
0 | 0 | 0 |
1 |
0 | 0 |
1 |
0 |
1 |
1 |
Операции кодируем кодом ![]()
Таблица 1.2 Импульсы выбора характера операции
| Номер импульса | Операции | |
| откл | Вкл | |
| 8 | 1 | 0 |
| 9 | 0 | 1 |
Число объектов на КП - 45.
Разбиваем объекты на группы, получаем 3 групп по 15 объектов в каждой.
Объекты группы кодируем кодом ![]() .
.
Таблица 1.3 Импульсы выбора объектов в группе
| Номер импульса | Номер объекта в группе |
|
|||||||||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | |||
| 8 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| 9 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| 10 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| 11 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| 12 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| 13 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| 14 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| 15 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| 16 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| 17 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | ||
| 18 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | ||
| 19 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | ||
| 20 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | ||
| 21 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | ||
| 22 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | ||
Кодируем группы кодом ![]()
Таблица 1.4 Импульсы выбора группы
| Комбинация | Номер группы | ||
| 1 | 2 | 3 | |
| 23 | 1 | 0 | 0 |
| 24 | 0 | 1 | 0 |
| 25 | 0 | 0 | 1 |
Для обеспечения заданного объема телемеханизации необходимое число выходов распределителя в полукомплекте телеуправления должно быть не меньше:
![]() ,
,
где: N - суммарное число выходов;
Nкп - число выходов, необходимых для выбора контролируемого пункта;
Nоб/гр - число выходов, необходимых для выбора объекта в группе;
Nоп - число необходимых выходов для выбора характера операции;
Nгр - число выходов необходимых для выбора группы;
3 - число служебных выходов.
![]()
Принимаем пятиразрядный двоичный счетчик по условию m больше n, где m - число выходов распределителя, создаваемое определенным числом разрядов счетчика (р).
Так как счетчик распределителя составляется из бинарных триггеров (триггеров со счетным входом), имеющих два устойчивых состояния (0 и 1), то есть в основу счета импульсов положена двоичная система.
Общее число импульсов, отсчитываемых счетчиком за цикл можно определить по формуле:
![]() ,
,
где 2 - основная система исчисления;
р - число разрядов счетчика (всегда целое).
![]() ,
,
то есть 32 больше 28, значит, пятиразрядный двоичный счётчик нам вполне подходит.

Определение расчетной частоты мультивибратора полукомплекта
Общее число импульсов в серии определяется по формуле:
![]()
Число длинных импульсов в кодовой серии определяется как сумма чисел элементов во всех сочетаниях, используемых при образовании кода с увеличением этой суммы в полукомплекте телеуправления на три импульса (служебные).
![]() .
.
Число коротких импульсов в кодовой серии:
![]() .
.
Число тактовых импульсов мультивибратора
![]() ,
,
где 3 - коэффициент перевода числа длинных импульсов в число тактовых импульсов мультивибратора
![]() .
.
По найденному числу тактовых импульсов Nтакт, необходимому для образования кодовой серии, и длительности цикла передачи Тц = 2,2 сек определяется расчетное значение частоты мультивибратора:
 ,
,
где k - коэффициент, учитывающий отношение периода колебаний мультивибратора передающего полукомплекта к периоду колебаний мультивибратора приемного полукомплекта k = 1.
 ,
,
так как при расчете мультивибратора, работающего совместно с триггером делителем частоты, расчетное значение его частоты удваивается и составляет 43,64 Гц.
Рассчитаем время передачи импульсов команды:
 , где
, где
f - пропускная способность линии связи f = 21 имп/сек.
![]() сек
сек
Расчетное время передачи 2,2 сек. равно допустимому значению 2,3 с. Значит, условие выполняется.
тяговая подстанция передача сообщение
Определение наибольшей, возможной удаленности пункта приема сообщений
Определение наибольшей, возможной удаленности пункта приема сообщений при отсутствии устройств, для ретрансляции сигналов сводится к определению дальности действия передатчика телемеханического устройства по проводным линиям связи.
Эта дальность действия определяется наибольшим перекрываемым затуханием (bдоп), при котором уровень сигнала в месте приема превышает уровень помех (Рпом) на некоторую величину (Роп).
Дальность действия передатчика в километрах определяется:
 ,
,
где: bдоп - наибольшее перекрываемое затухание линии, допустимое при данной мощности передатчика и данном уровне помех, Нп;
a - километрический коэффициент затухания, Нп/км;
n¢ - приведенное число промежуточных пунктов на 1 км линии;
bn - затухание вносимое одним промежуточным пунктом, Нп/км.
Наибольшее перекрываемое затухание линии, допустимое при данной мощности передатчика (Рдп) и данном уровне помех (Рсп) определяется:
![]() ,
,
где: Рдп - абсолютный уровень мощности передатчика, ограничиваемый допустимым влиянием на соседние каналы и зависящий от числа передатчиков, Нп (для телемеханических каналов ограничивают величиной Рдп = 0,6 Нп для воздушных линий и Рдп = 1,1 Нп для кабельных линий; в обоих случаях при одном передатчике);
Рпом - абсолютный уровень помехи, Нп;
Рсп - превышение абсолютного уровня полезного сигнала над абсолютным уровнем возможной помехи, Нп (зависит от вида модуляции: при частотной Рсп принимается более 2 Нп, при амплитудной Рсп - более 2,5 Нп);
![]()
 ,
,
где: Nкп - число контролируемых пунктов;
L - среднее расстояние между тяговыми подстанциями (принимаем равным 50 км).
![]()
α = 29.9*10-3 дБ/км из 29.9*10-3*0,115=0,00344 Нп/км
![]() км
км
Система АСТМУ-А выполнена на современной микропроцессорной элементной базе и обладает рядом преимуществ по сравнению с системами предыдущих поколений.
Оборудование диспетчерской (верхнего уровня управления) состоит из нескольких персональных компьютеров, объединенных в локальную сеть и выполняющих роль операторской станции. Один из компьютеров подключен через узел связи к линии связи с контролируемыми пунктами.
На контролируемых пунктах к каналам телемеханического управления и контроля могут подключаться либо шкафы КП-М (ПС), КП-Б (ТП) при традиционном оборудовании подстанций, либо центральные компьютеры (через узлы связи) для подстанций и постов секционирования нового поколения. В структурной схеме АСТМУ-А на рис.2 показано подключение трех КП различного типа. Число КП, подключаемых к одному ПУ (энергодиспетчерскому кругу), ограничивается допустимым временем обновления информации ТС, видом предоставляемой линии связи (проводная,, оптоволокно, радиоканал), величиной информационной нагрузки на диспетчера при организации ремонтных работ.
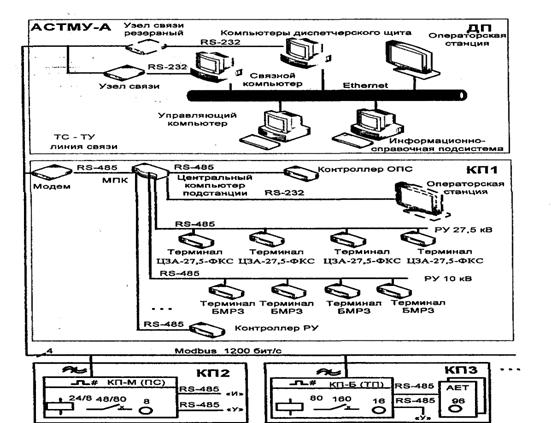
Рис.2. Структурная схема АСТМУ-А
КП-1 представляет подстанцию, присоединения которой оборудованы современными терминалами управлении. Это могут быть микропроцессорные блоки релейной защиты БМРЗ, ЦЗА или специализированные контроллеры. Управление терминалами и контроллерами осуществляется через центральный компьютер подстанции, который связан с контроллерами нижнего уровня по интерфейсу RS-485. Операторское управление оборудованием может осуществляться с верхнего уровня управления через модем от ПУ или от операторской станции, размещаемой на подстанции и подключенной по интерфейсу RS-232.
КП-2 представляет собой контролируемый пункт с малым числом объектов, оснащенных схемами управления, выполненных на релейной элементной базе. Для таких пунктов предназначен шкаф КП-М (ПС).
КП-3 представляет контролируемый пункт с большим числом объектов, имеющих традиционное управление, - для них предназначен шкаф КП-Б (ТП).
Интерфейсы и протоколыПостроение систем телемеханики тяговых подстанций в настоящее время осуществляют в тесной связи с системой автоматического управления. В таких случаях может применяться аппаратура, обслуживающая обе системы и использующая общую информацию. Для минимизации затрат на создание систем важную роль играет стандартизация как отдельных элементов систем, так и способов обмена информации в системе [1].
Коммуникационная технология построения единой информационной сети, объединяющей интеллектуальные контроллеры, датчики и исполнительные устройства, определяется одним термином - fieldbus (полевая шина или промышленная сеть). Fieldbus - это, главным образом, применяемый протокол взаимодействия устройств с учетом используемых интерфейсов.
На рынке предлагается около 50 различных видов промышленных сетей, среди них: CAN, Modbus, Profibus, LonWorks, ШС 870-5. Используется множество интерфейсов: RS-232, RS-422A, RS-423A, RS-485, токовая петля (Current Loop), USB. Ниже рассмотрены интерфейсы и протоколы, применяемые в АСТМУ-А
Передача информации в телемеханических системахПри передаче информации в системе телемеханики производится ее преобразование в различных устройствах, например, как представлено на рис.3.
Для системы диспетчерского управления сообщения носят дискретный характер и при передаче от источника к приемнику кодируются аппаратурой телемеханики. Обычно используется код с возможностью обнаружения ошибки на приемной стороне. Для передачи по линии связи канал связи может выполнить несколько преобразований сигнала. Для аналоговых каналов связи производится модуляция несущего сигнала полученным кодом таким образом, чтобы уложиться в заданный частотный диапазон, например тональный ТЧ. Более сложные преобразования потребуются для синхронной цифровой иерархии (см. рис.1).
Физический уровень обеспечивает передачу битового потока. Используется передача без памяти, при которой сигнал, определяемый каждым передаваемым битом, не зависит от передаваемых до этого бита сигналов.
К физическому уровню относится сопряжение устройства телемеханики с каналом связи (на рис.3 обозначено точками А и Б).
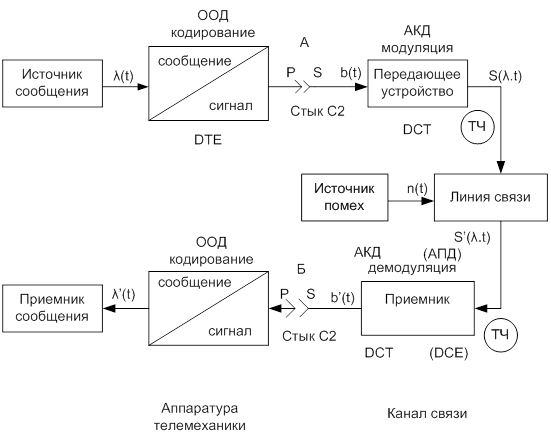
Рис.3. Упрощенная схема передачи информации в системе телемеханики
Границу раздела рассматриваемых систем или отдельных частей системы, через которую передается информация, принято называть интерфейсом. При описании интерфейса применяется специфичная терминология. В рамках этой терминологии аппаратура передачи данных телемеханики является оконечным оборудованием данных
(DTE - Data Terminal Equipment). Аппаратно-программные средства, которые входят в состав сети электросвязи, называют аппаратурой окончания канала данных (DCT - Data Circuit Terminating equipment, иногда обозначают также DCE - Data Communication Equipment). Для системы АСТМУ-А в качестве DTE будем рассматривать контроллер МК-Д или связной компьютер ПУ. В качестве DCT - модем или мультиплексор.
Канальный уровень обеспечивает задание последовательности кадрам сообщений, обнаружение ошибок синхронизации и размера кадра. В функции канального уровня входят опросы КП, передача квитанций, повторы при искажениях в канале. По ГОСТ Р МЭК 870-5-1-95 предусмотрены 3 класса услуг канального уровня: S1 - посылка без ответа, S2 - посылка/подтверждение, S3 - запрос/ответ.
В АСТМУ-А используется класс S3. Эта услуга представляет собой получение информации от контролируемого пункта по запросу пункта управления, т.е. используется для процедуры "чтение". При невозможности передачи сообщения контролируемый пункт отвечает отрицательной квитанцией. При обнаружении ошибки при приеме ответа или при приеме отрицательной квитанции запрос повторяется оговоренное число раз, после чего на вышестоящий уровень протокола передается сигнал о неисправности системы.
Порция информации, сформированная канальным уровнем из данных, поставляемых уровнем приложения, обычно называется кадром.
Прикладной уровень определяет режим запуска передачи и основные функции пользователя. В системе АСТМУ-А в основном используется режим запуска передачи "по запросу". В этом случае ПУ запрашивает КП для передачи информации о действительном состоянии объектов. Возможности прикладного уровня задаются программным обеспечением операторской станции диспетчера. Обычно они включают функции инициализации и синхронизации контролируемых пунктов, сбор данных, команды управления, передачу параметра для КП.
Стандартные форматы телемеханических системНаиболее уязвимым звеном передачи информации является линия связи; уровень помех, воздействующих на нее, трудно изменить. Помеха в общем случае может исказить сигнал, в результате приемник информации получит сообщение с ошибкой A/ (t) ф X (t). Для оценки достоверности информации наиболее часто выбирается вероятность ложного приема Рд пр-
Все телемеханические каналы связи разделяются по достоверности на три класса: I, 2,3
Международная электротехническая комиссия разработала ряд стандартных форматов для телемеханики. Эти форматы характеризируются значениями вероятностей нераспознанных ошибок. Структура форматов приведена на рис.4.
Формат FT1.1 представляет собой последовательности бит, сгруппированные в кодовые слова. Эти группировки часто называют байтами или символами. Каждое слово содержит данные, обрамленные служебными битами. В формате FT1.1 используются служебные биты: до данных - стартовый бит ("О"), после данных - бит проверки на четность р и столовый бит ("1"). Для кодирования данных выделяются 8 бит.
Слова передаются без пауз между ними, т.е. блоками. Такой блок называется кодовым предложением или кадром (фреймом). Число слов в кадре для формата FT 1.1 не должно превышать 127. Если необходимо передать сообщение больше, чем 127 байт, то оно разбивается на несколько кадров.
Формат FT 1.1 используется в малоответственных системах передачи информации (например, в циклических системах телеизмерения).
Формат FT1.2 состоит нескольких слов с данными (не более 255) и служебного слова в конце кадра. Каждое информационное слово имеет такую же структуру, как и в формате FT1.1 В служебном слове записывается контрольная сумма. Контрольная сумма определяется путем арифметического поразрядного суммирования всех слов с данными по модулю 256 и инвертированием полученного результата. ГОСТ Р МЭК 870-101-2001 допускает использование блоков только формата F1.2.
В формате FT2 каждое слово имеет только 8 информационных бит.
Формат FT3 строится по тем же принципам, что и FT2, с использованием более мощного образующего полинома Р (x) =х16 + x13+x12 + + x11 + х10 + х8 + х6 + х5 + х2 + 1. Минимальное кодовое расстояние увеличивается до шести dmjn = 6.
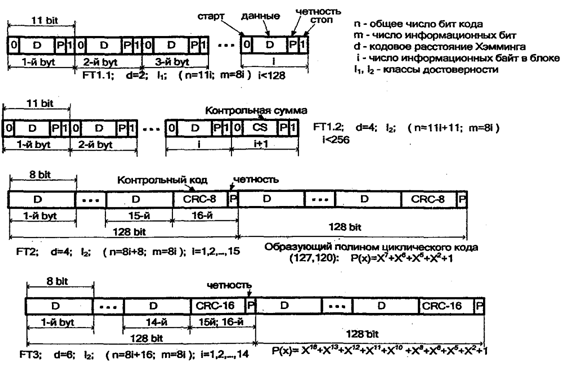
Рис.4. Схема рекомендуемых форматов телемеханики
На рис.5 приведены вероятности нераспознанных ошибок для рассмотренных форматов и классов достоверности.
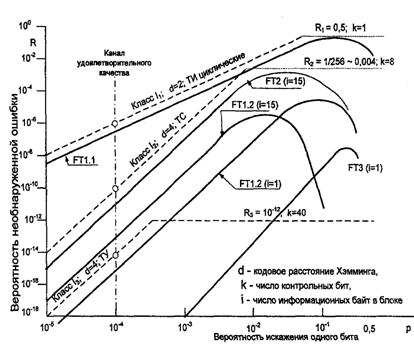
Рис.5. Классы достоверности стандартные форматы телемеханики
Электрический интерфейс. Сигналы в RS-232 передаются относительно общего провода - сигнальной земли (SG). Логической единице (SPACE - для данных, ON - для линий управления) соответствует напряжение на входе приемника в диапазоне от - 25 до - 3 В, логическому нулю (MARK - для данных, OFF - для линий управления) - напряжение от +25 до +3 В. Сигнальная земля SG является общим проводом для всех электрических цепей интерфейса. Ток короткого замыкания передатчиков - не более 20 мА.
Линии данных обозначают TD и RD. Интерфейс RS-232C обеспечивает два независимых последовательных канала данных: первичный (главный) и вторичный (вспомогательный). Оба канала могут работать в полнодуплексном режиме, т.е. одновременно осуществляют передачу и прием информации. На рис.6 показаны уровни сигнала интерфейса RS-232.
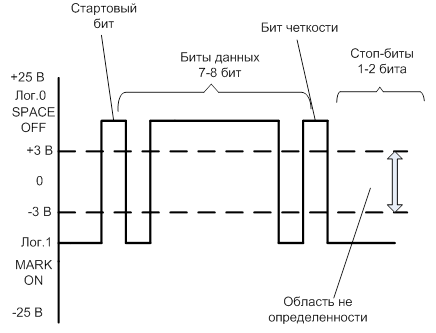
Рис.6. Передачи символа на сигнальных линях TD/RD интерфейса RS-232
Управляющие сигналы интерфейса RS-232. Кроме земли и линий данных, в интерфейсе RS-232 определены управляющие линии и линии синхронизации, последние используются при работе в синхронном режиме.
Управляющие сигналы (RTS, CTS, DTR, DSR, DCD). Эти сигналы позволяют ШЕ начать диалог с DCE до передачи или приема данных, а также могут служить для управления потоком данных (приостановление/возобновление передачи). В полном наборе интерфейса определено 25 различных сигнальных линий. В практике чаще всего применяются 9 цепей.
Потоком данных управляют либо аппаратно, либо программно. Управление заключается в посылке приемником уведомления о возможности/невозможности приема данных.
Аппаратное управление потоком (Flow Control) использует сигнал CTS, который позволяет остановить передачу данных, если приемник не готов к их приему. Передатчик выдает очередной байт только при включенной (состояние ON) линии CTS. Байт, который уже начал передаваться,
сигналом CTS не останавливается, что гарантирует целостность посылки. Если аппаратный протокол не используется, у передающего терминала должна устанавливаться перемычка RTS - CTS.
Способ синхронизации. Интерфейс RS-232 является последовательным интерфейсом и наиболее часто используется в асинхронном режиме. Последовательная передача означает, что данные передаются по единственной линии. Для синхронизации (в асинхронном режиме) битам данных предшествует стартовый бит, заканчивается посылка (старт-стопный символ) одним или двумя стоповыми битами. В состоянии тишины передатчик обычно выдает уровень логической
единицы. Если приемник начинает получать поток байтов, то его внутренний генератор запускается при получении перепада 1/0, соответствующего нормальному началу очередного символа (стартовый бит после стоп-бита или интервала тишины). Таким образом осуществляется циклическая синхронизация приемника в начале каждого принимаемого символа.
Протокол MODBUSОбщие сведения.
Протокол передачи - формализованный" набор правил, полностью определяющий порядок взаимодействия устройств или процессов друг с другом. Протокол определяется перечнем передаваемых сигналов, процедурой обмена этими сигналами, форматами сигналов и правилами кодирования каждого поля формата.
В данном курсовом проекте рассмотрим протокол Modbus RTU, который применяется в системе АСТМУ-А. Этот режим поддерживает требования стандарта ШС 870-5 (уровень 2, канальный). Для передачи данных интерфейс не определен, обычно используются RS-232C, RS-422, RS-485 или токовая петля 20 мА. В АСТМУ-А токовая петля не используется.
Данный протокол определяет требования к канальному (второму) и прикладному (седьмому) уровню модели OSI. Протокол предполагает в линии одно активное (ведущее, запрашивающее, главное) устройство Master, которое может обращаться к нескольким пассивным (подчиненным) устройствам Slave по их адресу. Синтаксис команд протокола позволяет адресовать 247 устройств. Инициатива проведения обмена всегда исходит от ведущего устройства. Ведомые устройства прослушивают линию связи. Master подает запрос на линию и переходит в состояние прослушивания линии связи. Ведомое устройство отвечает на запрос, пришедший в его адрес.
Окончание ответной посылки Master определяет, вычисляя временные интервалы между окончанием приема предыдущего байта и началом приема следующего. Если этот интервал превысил время, необходимое для приема двух байт на заданной скорости передачи, прием кадра ответа считается завершенным.
Диалоговые процедуры и форматы кадров
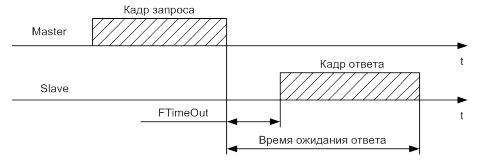
Рис.7. Диалоговая процедура обмена сообщениями в Modbus
Сообщения при обмене формируются в кадр из отдельных байт (символов, посылок). Возможные структуры байта в Modbus RTU приведены на рис.8.
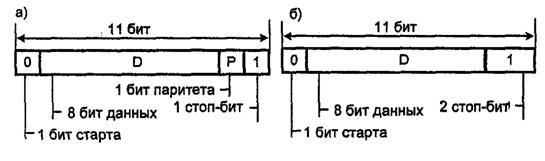
Рис.8. Структура байта Modbus:
а - при наличии бита контроля на чёткость/не чёткость (бит паритета);
б - при отсутствии бита паритета
При установке на четность подсчитывается количество бит в области данных, и если оно нечетное, то бит паритета устанавливают в 1, а если четное, то бит паритета устанавливают в 0, таким образом, общее количество бит будет четным.
Кадры запроса и ответа по протоколу Modbus имеют фиксированный формат. Каждый запрос со стороны ведущего узла включает код команды (чтение, запись и т.д.), адрес абонента, размер поля данных, собственно данные и контрольный CRC-код. Функция обслуживания тайм-аута реализована для фиксирования коллизий при приеме/передаче данных. Размер полей в байтах приведен на рис.9.
Старт кадра - очередной кадр начинается с интервала тишины (логического сигнала 1) длительностью не менее 3,5 символа (байта) на данной скорости передачи. Стартовое поле необходимо, поскольку используется асинхронная передача, и необходимо в канале связи иметь признак начала передачи.
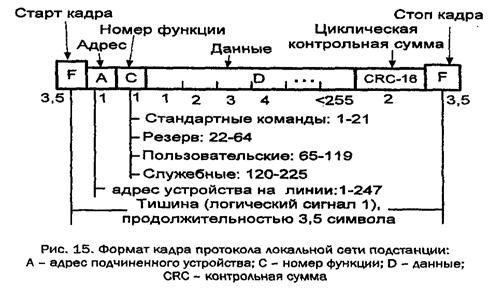
Рис.9. Формат кадра протокола локальной сети подстанции:
A - адрес подчинённого устройства; С - номер функчии; D - данные; GКС - контрольная сумма
Адрес подчиненного устройства - первое однобайтное поле кадра. Оно содержит адрес подчиненного устройства, к которому адресован запрос. Подчиненные устройства отвечают только на запросы, поступившие только в их адрес. Ответ также начинается с адреса отвечающего устройства, который может изменяться от 1 до 247. Адрес 0 используется для широковещательной передачи, его распознает каждое устройство, но ответы не возвращаются.
Номер функции (код команды) сообщает устройству, каких данных или выполнения какого действия требует от него ведущее устройство; принимает значения от 1 до 247.
Данные - поле содержит информацию, необходимую подчиненному устройству, или содержит его ответ на запрос ведущего. Длина и формат поля зависят от номера функции, при этом длина может быть от О до 254 байт.
Контрольная сумма - заключительное двухбайтное поле кадра, содержащее циклическую контрольную сумму CRC-16 всех предыдущих полей кадра.
Стоп кадра - интервал тишины длительностью не менее 3,5 символа.
Обработка ошибок.
Различают коммуникационные ошибки (связанные с искажениями при передаче данных) и логические (недопустимое значение запроса). Master после посылки сообщения ожидает ответ в установленном интервале времени. Если Slave обнаружит коммуникационную ошибку в адресованном ему сообщении или не может ответить, то он промолчит, и Master по истечении установленного интервала (тайм-аута) фиксирует ситуацию как ошибочную. Проверка на ошибку производится приемником в пределах каждого байта (символа) по четности, в пределах кадра - по CRC.
В протоколе Modbus используется следующая диалоговая процедура.
1. Если Slave принимает корректный запрос и может его нормально обработать, то возвращает нормальный ответ, в котором адрес и номер функции совпадает с принятыми от устройства Master.
2. Если Slave не принимает какого-либо значения, никакого ответа не отправляется. Master диагностирует ошибку по тайм-ауту.
3. Если Slave принимает запрос, но обнаруживает ошибку (паритет, CRC), никакого ответа не отправляется. Master диагностирует ошибку по тайм-ауту.
4. Если Slave принимает запрос, но не может его обработать, отправляется ответ, содержащий в области данных сведения об ошибке. Кроме того, старший бит кода команды в ответе устанавливается в единицу.
Базовый состав оборудования кп системы астму-а
Общее описание шкафа КП-М (ПС)
В базовый состав АСТМУ-А для КП, оснащенных традиционным оборудованием и не имеющих центрального компьютера подстанции, входят два типа шкафов, размещаемых на контролируемых пунктах. Шкафы КП-М (ПС) предназначены для управления линейными устройствами электроснабжения с небольшим числом объектов управления (посты секционирования, станции электрохозяйства электрифицированных ж. д.). Для управления оборудованием тяговых подстанций и пунктов группировки предназначены шкафы КП-Б (ТП).
Функциональная схема шкафа КП-М (ПС) показана на рис.10. Основные элементы шкафа: контроллер (А2), мультиплексоры (А4. А6), мультиплексор телеизмерения (A3), модем (А1), источник питания (А7) и наборы зажимов для подключения внешних цепей (XI. Х4). В состав шкафа КП-М (ПС) входят калорифер (А9) и термостат (А 10), которые служат для поддержания рабочей температуры воздуха внутри шкафа, обеспечивающей нормальное функционирование модулей.
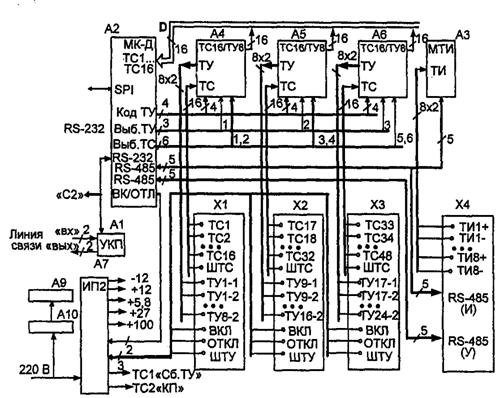
Рис.10. Функциональная схема шкафа КП-М (ПС)
Состав шкафа. Центральным функциональным устройством шкафа является контроллер. Контроллер МК-Д (А2) имеет шины дискретных данных и несколько последовательных интерфейсов.
Дискретные шины обеспечивают:
а) чтение сигналов ТС (ТО. ТС16);
б) передачу кода ТУ (Код_ТУ 1. Код_ТУ4);
в) выбор мультиплексора для команды ТУ (Выб_ТУ 1. Выб_ТУЗ);
г) выбор мультиплексора для команды ТС (Выб_ТС1., Выб_ТСб). Интерфейс RS-232 связывает контроллер МК-Д с модемом (А1) или
внешним компьютером (разъем С2 на лицевой панели контроллера МК-Д), обеспечивая канал управления. Один интерфейс RS-485 обеспечивает связь контроллера с мультиплексором ТИ (A3) и внешними микропроцессорными устройствами систем измерения и диагностики (канал расширения). Второй интерфейс RS-485 служит для подключения внешнего контроллера канала управления. Оба интерфейса RS-485 выполнены четырехпроводными.
Связь контроллера МК-Д с устройством программирования' обеспечивает интерфейс SPI.
Выходы команд телеуправления ТУ1. ТУ24, входы каналов телесигнализации ТС1. ТС48 и телеизмерений ТИН. '. ТШ выведены на наборы зажимов XI. Х4 для подключения внешних цепей к шкафу.
Регистрация сигналов ТС. Модуль контроллера МК-Д осуществляет последовательный просмотр всех сигналов ТС, поступающих на шкаф КП-М (ПС), а также производит анализ изменения состояния этих сигналов и их регистрацию. Период просмотра и регистрации сигналов ТС составляет 8 мс. Опрос
телесигнализации с шины ТС осуществляется индивидуальными сигналами выбора ТС. Во время опроса к шине ТС подключается только один из мультиплексоров А4. А6, который выставляет свои сигналы на шину ТС. Эти данные поступают в регистр ввода телесигнализации контроллера и в дальнейшем фиксируются в его оперативной памяти.
Алгоритм формирования команд ТУ. Команды телеуправления поступают на вход RS-232 контроллера МК-Д через модем (А1). В контроллере принятая информация проверяется на достоверность в рамках информационного протокола MODBUS и, в случае отсутствия ошибок, помещается в приемный буфер команд модуля. В контроллере осуществляется также проверка состояния сигнала ТС1 (СБОЙ_ТУ), формируемого в модуле источника питания (А7) и несущего информацию о наличии или отсутствии тока в цепях объекта телеуправления.
При наличии тока в цепи управления (команда ТС1 = 1) выполнение команды ТУ невозможно. Ток в цепи управления проходит при нормальном функционировании системы во время исполнения приказа, а при отсутствии исполняемого приказа - в случае возникновения неисправности. Примером неисправности может служить сваривание контактов выходных исполнительных реле ТУ (см. схему подключения цепей ТУ ниже). При отсутствии тока в цепи управления (команда ТС1 = 0) контроллер формирует управляющие сигналы на шинах: Код_ТУ1. Код_ТУ4 и Выб_ТУ1. Выб_ТУЗ. Эти сигналы после дешифрирования в выбранном мультиплексоре ТС/ТУ формируют одну из релейных команд выбора объекта телеуправления (ТУ1. ТУ24) и одну из релейных исполнительных команд телеуправления ВКЛ или ОТКЛ, которые подаются на выходные наборы зажимов (XI. ХЗ).
Регистрация сигналов ТИ. Модуль мультиплексора ТИ (A3) осуществляет преобразование поступающих на него сигналов телеизмерений (ТИ1. ТИ8) в цифровую форму. Преобразование осуществляется программно-управляемым аналого-цифровым преобразователем (дискретность преобразования - 8 разрядов). Цифровая информация о значениях сигналов ТИ через интерфейс RS-422 поступает в модуль контроллера МК-Д. Период обновления информации о значениях сигналов ТИ по всем каналам телеизмерений составляет примерно 1 секунду.
Контроллер МК-Д. Структурная схема контроллера МК-Д приведена на рис. 20. В состав контроллера МК-Д входят два микропроцессора: связной МК, поддерживающий обмен с компьютером внешнего уровня, и МК ТУ/ТС, предназначенный для формирования сигналов ТУ, ТС и ТИ. Связь между этими микропроцессорами осуществляется по интерфейсу SPI. Для хранения и обработки данных имеется оперативная память, таймер обеспечивает данные временными метками. Переключатели позволяют устанавливать режимы работы контроллера МК-Д и его адрес для работы в системе телеуправления. Подробнее работа контроллера будет описана ниже.
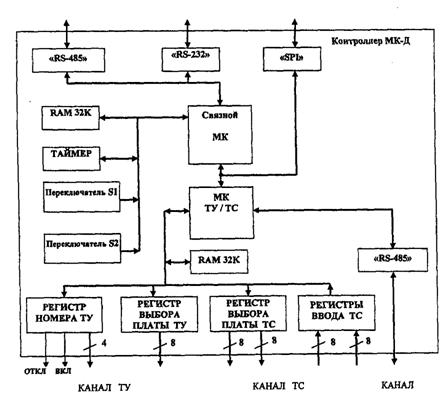
Рис.11. Структурная схема контроллера МК-Д
Таймер. Таймер установлен в контроллере для получения значений текущих времени и даты, которыми маркируются сообщения ТС и ТИ. Один раз в секунду данные из микросхемы таймера переписываются в буфер времени и даты МК ТУ/ТС. Значения в буфере хранятся в двоично-десятичной системе исчисления, формат данных представлен на рис.12.
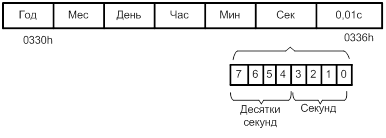
Рис.12. Формат даты и времени
Подключение цепей ТИ. На соединитель Х4 шкафа КП-М (ПС) выведены 8 телеизмерительных входов мультиплексора ТИ (A3), предназначенные для измерения сигналов ТИ (постоянного и переменного тока). При необходимости увеличения объемов телеизмерения могут подключаться внешние модули (например, ЛЕТ) через интерфейс для канала телеизмерений RS-485 (Ji), выведенный на соединитель Х4.
Каждая внешняя сигнальная цепь ТС, подключаемая к шкафу, представляет собой пару проводов, один из которых подключается к одному из зажимов ШТС, а второй - к соответствующему зажиму ТС1. ТС48. Напряжение питания цепей ТС составляет 100 В. Подключение источника питания ТС к наборам зажимов Х1-ХЗ осуществляется в импульсном режиме.
Выводы контактов всех реле модулей мультиплексоров ТС/ТУ
(А4. А6) подключены соответственно к зажимам ТУ1-1. ТУ24-1 и ТУ1-2. ТУ24-2 наборов соединителей XI. ХЗ (см. рис.10). Причем один контакт из каждой пары в модулях мультиплексора ТС/ТУ является общим и подключен к отрицательному полюсу источника питания 27 В модуля ИГО (рис.13). Командные цепи телеуправления модуле источника питания ИП2 шкафа. Эти цепи ТУ также выведены на наборы зажимов XI. ХЗ.
Питание внешних объектов ТУ осуществляется от источника напряжением 27 В постоянного тока. Цепь ШТУ выведена на зажимы соединителей XI. ХЗ. Предусмотрено два способа подключения объектов телеуправления.
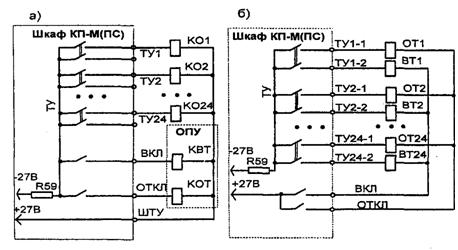
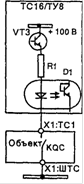
Рис.13. Схемы подключения цепей ТУ:
а - однорелейная; б - двухрелейная
При однорелейной схеме (см. рис.13, а) используются цепи: ТУ1-1. ТУ 1-24, ШТУ, ВКЛ и ОТКЛ. При этом цепи ВКЛ и ОТКЛ защищены от отрицательного полюса источника электропитания напряжением 27 В через токоизмерительный резистор R59, расположенный в модуле источника питания ИП2. Реле КВТ и КОТ являются общеподстанционными и обычно размещаются в шкафах общеподстанционного управления (ОПУ).
При двухрелейной схеме подключения объектов телеуправления (см. рис.13,6) используются цепи выбора объектов телеуправления ТУ1-1. ТУ24-1 и ТУ1-2. ТУ24-2, командные цепи телеуправления ВКЛ и ОТКЛ. При этом цепи ВКЛ и ОТКЛ запитаны от положительного полюса источника электропитания напряжением 27 В модуля ИП2.
Общее описание шкафа КП-Б (ТП)
Функциональная схема шкафа КП-Б (ТП) приведена на рис.14. Отличие от шкафа КП-М (ПС) заключается в составе мультиплексоров, подключаемых к контроллеру МК-Д, изменяется также схема подключения дискретных цепей и программа работы контроллера. В шкафу КП-Б (ТП) устанавливается 5 мультиплексоров ТС32 (на 32 сигнала ТС каждый), 5 мультиплексоров ТУ16 (на 16 сигналов ТУ каждый) и 2 мультиплексора телеизмерений МТИ (по 8 сигналов ТИ каждый).
Выходы команд телеуправления ТУ1. ТУ80 (от мультиплексоров ТУ 1 б), входы каналов телесигнализации ТС 1. ТС 160 (от мультиплексоров ТС32) и телеизмерений ТИ1. ТИ16 (от мультиплексоров ТИ) выведены на наборы соединительных зажимов X1. X11.
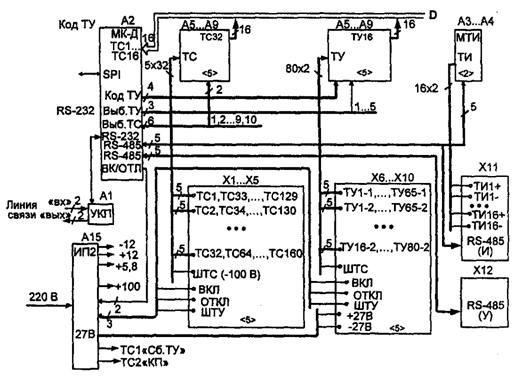
Рис.14. Функциональная схема шкафа КП-Б (ТП)
Последовательные интерфейсы контроллера МК-Д канала телеизмерений RS-485 (И) и канала управления RS-485 (У) выведены соответственно на панели соединительных зажимов XI1 и Х12.
Период просмотра и регистрации сигналов ТС составляет 8 мс.
Цифровая информация о значениях сигналов ТИ через последовательный интерфейс RS-422 поступает в контроллер МК-Д. Интерфейс RS-422 параллельно выведен также на соединитель XI1 для обеспечения возможности подключения внешних блоков измерения. Период обновления информации о значениях сигналов ТИ по всем каналам телеизмерений шкафа КП-Б (ТП) составляет примерно 1 секунду.
Контроллер МК-Д
Контроллер запрограммирован на максимальное число принимаемых модулем сигналов: ТС - 256, ТУ - 128, ТИ - 112; фактическое число сигналов определяется схемой шкафов КП-М (ПС) и КП-Б (ТП). На лицевую панель контроллера МК-Д выведены светодиодные индикаторы, индицирующие:
работу приемника и передатчика SPI-интерфейса - SI и SO;
работу приемника и передатчика интерфейсов RS-232 и RS-485 канала управления - RX и ТХ;
работу приемника и передатчика интерфейса RS-422/RS-485 канала расширения системы - RSI и TSI;
команду ТУ в двоичном коде - КОД_ТУ (разряды 8,4,2,1);
команду ТУ - "включить" - ВКЛ;
команду ТУ - "отключить" - ОТКЛ.
Обработка сигналов ТС. Опрос состояния объектов пунктом управления (ПУ) и контролируемыми пунктами (КП) производится асинхронно. Поэтому на КП организуется накопление и хранение информации в памяти (буферах). МК ТУ/ТС опрашивает все модули ТС за 1 мс и сохраняет полученную информацию в своем буфере памяти. Если в течение восьми циклов опроса, т.е. за время, равное 8 мс, будет отмечено новое устойчивое значение одного или нескольких сигналов ТС, то новый отсчет ТС будет передан в буфер текущих значений ТС (38 байт) и в буфер очереди срезов ТС. Форматы буферов приведены на рис.25.
Очередь срезов ТС представляет собой 64 записи рассмотренного формата. Таким образом, буфер текущих значений ТС всегда содержит состояние входов ТС шкафа КП-Б (ТП) или КП-М (ПС) на данный момент времени, а буфер очереди срезов ТС представляет собой историю их изменений.
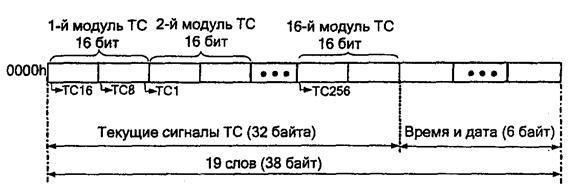
Рис.15. Формат буферов “Текущие ТС” и “Очереди срезов ТС”
Регистра памяти МК ТУ/ТС
В связи с ограничениями на время опроса всех КП организованы два буфера, хранящие информацию о наличии данных, еще не переданных на ПУ. Это позволяет ПУ предварительно опрашивать КП на предмет наличия новой информации, а уже затем оптимально организовывать ее передачу. Буфер статуса (16 бит) хранит отметки о наличии непрочитанных срезов в очередях, а буфер квитирования (16 бит) - отметки о прочтении срезов пунктом управления.
Обработка сигналов ТУ. После записи команды в буфере МК ТУ/ТС осуществляется проверка на возможность ее выполнения. Команда исполняется, если:
завершено выполнение предыдущей команды;
задан номер ТУ от 1 до 128 включительно;
в байте кода команды ТУ установлен бит ВКЛ или ОТКЛ;
в байте кода команды ТУ сброшены неиспользуемые биты. Формат буфера регистра памяти команды ТУ приведен на рис.16.
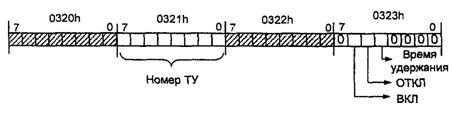
Рис.16. Формат буфера команды ТУ
В контроллере МК-Д по номеру ТУ формируется индивидуальный сигнал выбора одного из модулей (Выб_ТУ1. Выб_ТУ8) и четырехразрядный двоичный код номера команды ТУ в данном модуле.
Обработка сигналов ТИ. Формирование данных телеизмерения осуществляется в мультиплексорах ТИ (МТИ) и в блоках расширения телеизмерения. Информация от указанных блоков поступает по протоколу Modbus RTU, при этом контроллер МК-Д выполняет функции ведущего устройства (Master). Используется четырехпроводный интерфейс RS-422 в асинхронном режиме на скорости 9600 бит/с с форматами посылок: 1 стартовый бит, 8 бит данных, 1 стоповый бит. Время опроса всех устройств телеизмерения составляет не более 1 с. В МК ТУ/ТС организован буфер для хранения информации об установленной связи с модулями ТИ. При этом единичное значение бита состояния ТИ означает, что есть связь контроллера МК-Д с устройством ТИ по интерфейсу RS-422, а нулевое значение устанавливается в случае, если устройство ТИ не отвечает на запросы контроллера МК-Д.
Результаты текущих измерений, поступающие от устройств ТИ, помещаются в буфер "Данные ТИ", формат которого приведен на рис.17.
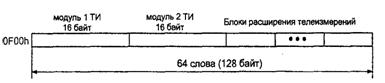
Рис.17. Формат буфера “Данные ТИ” регистра памяти МК ТУ/ТС
Мультиплексор ТУ8/ТС16
В шкафах системы АСТМУ-А могут применяться несколько типов мультиплексоров: ТУ16, ТС32, ТУ8/ТС16. Рассмотрим мультиплексор ГУ8/ТС16, применяемый в шкафах КП-М (ПС). Функциональная схема мультиплексора ТС16/ТУ8 приведена на рис.18.
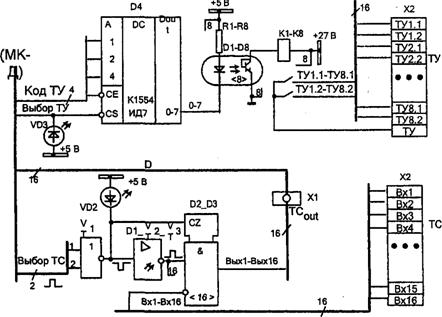
Рис.18. Функциональная схема мультиплексора ТС16/ТУ8
Мультиплексор осуществляет декодирование команды ТУ, полученной от контроллера МК-Д. Выбор данного мультиплексора отображается индикатором "ТУ". Для каждого из приказов в выходной цепи имеется реле с двумя замыкающими контактами. По одному выводу каждого контакта присоединено к общей цепи ТУ. Таким образом, на набор зажимов Х2 выводится 17 цепей для 8 приказов. Одновременно может быть выдан только один приказ. Оптронные пары D1-D8 обеспечивают гальваническую развязку выходных цепей от цепей шкафа КП-М (ПС). Мультиплексор также обрабатывает сигналы ТС, поступающие от объектов контроля через набор зажимов Х2 на входы Bxl. Bxl 6. Обработка заключается в том, что при выборе данной группы сигналов ТС контроллер МК-Д выставляет кратковременный импульс выбора ТС (VT1), одновременно срабатывает индикатор "ТС". На время опроса на выходную шину D выставляются 16 сигналов ТС данного мультиплексора. Логические единицы поступают на те разряды выходной шины, к которым подключены цепи ТС, имеющие на входе Вх1. Вх16 потенциал 100 В. Такой потенциал может поступать от шинки ШТС через замкнутый контакт реле контролируемого объекта. В интервалах между опросами выходы схем D2_D3 находятся в состоянии высокого сопротивления, т.е. отключены от шин данных D контроллера МК-Д и контроллер в эти интервалы может подключить к этим шинам другой мультиплексор. Таким образом, шина данных используется для передачи информации от нескольких мультиплексоров.
Мультиплексор ТИ
Мультиплексор телеизмерений МТИ осуществляет телеизмерения и допусковый контроль до 8 аналоговых сигналов ТИ и передает данные по интерфейсу RS-485 управляющему контроллеру МК-Д. Амплитуда входных сигналов ТИ задается перемычками S1. S8. Скорость обмена по интерфейсу RS-485 - 9600 бит/с. Внешние подключения МТИ осуществляются с помощью разъемов XI. ХЗ печатной платы.
Сигналы от датчиков напряжения через разъем Х2 поступают в МТИ, где запоминаются и обрабатываются. Ввод программ алгоритмов обработки осуществляется через разъем ХЗ посредством ПЭВМ при наладке модуля. Обработку данных ТИ осуществляет специальный микропроцессор, имеющий в своем составе аналогово-цифровой преобразователь АЦП. Микропроцессор осуществляет также вычисление линейных напряжений по измеренным фазным напряжениям и производит допусковый контроль измеряемых параметров.
На лицевой панели блока имеется кнопка "RST" для перезапуска микропроцессора. Исправное состояние МТИ индицируется поочередным миганием с частотой около 0,5 Гц светодиодов "Rx" и "Тх", контролирующих обмен с блоком МК-Д.
Питание подается через разъем XI от блока питания ИГО.
Модем-УКП
Модем предназначен для организации связи по четырехпроводным некоммутируемым каналам тональной частоты и физическим линиям связи между контроллером МК-Д находящимся на КП, и ЭВМ на пункте управления. Модем обеспечивает работу в одном из двух форматов: по системе ЛИСНА или по протоколу Modbus (АСТМУ-А). Во всех форматах диапазон рабочих частот в канале связи от 300 до 3600 Гц. Используется частотная модуляция сигнала с двумя частотами Fh (нижняя частота) и Fb (верхняя частота). Модем осуществляет преобразование двоичных сигналов контроллера МК-Д в аналоговые сигналы линии связи и наоборот (рис. 19).
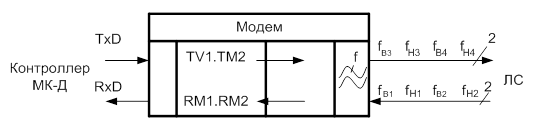
Рис. 19. Модем УКП
В режиме обмена данными по каналу связи по формату АСТМУ-А обеспечивается скорость передачи данных 1200 бит/с.
Для связи с контроллером МК-Д используется интерфейс RS-232 с параметрами блока данных для сигналов: ТС не более 64 байт, ТУ в формате ЛИСНА не более 40 байт, ТУ в формате АСТМУ-А не более 13 байт.
На лицевую панель модема-УКП выведены светодиодные индикаторы, индицирующие:
соответствие напряжения электропитания модуля норме - ПИТ;
нормальное функционирование программы модема - МИГ;
достаточность уровня входного сигнала в диапазоне частотного канала модема - УРОВ_СИГН;
прием модемом данных из канала связи - ПРМ-ЛИН;
передачу модемом данных в контроллер МК-Д - ПРД-RS;
прием модемом данных от контроллера МК-Д - ITPM-RS;
выдачу модемом в линию связи данных по первому и второму частотному каналу - ПРД-ЛИН_1 и ПРД-ЛИН_2.
Функциональная схема модема представлена на рис. 20. В состав платы модема-УКП входят: согласующие линейные цепи А1, модулятор-демодулятор (модем) А2, линейный выходной каскад A3, микропроцессорный контроллер (МПК) А4, переключатели задания режимов работы модуля А5, индикаторы состояний работы МПК А6, схема контроля напряжений электропитания А7, интерфейс RS-232 A8, интерфейс СЕРВИС А9, предварительный полосовой фильтр А10.
Согласующие линейные цепи А1 предназначены для согласования входного и выходного линейного сопротивления модема с сопротивлением канала связи в полосе частот от 300 до 3600 Гц. Пятипозиционный переключатель S1 подключает необходимое значение нормирующего входного сопротивления, а двухпозиционный переключатель S2 - нормирующее выходное сопротивление. Трансформаторы Т1 и Т2 осуществляют гальваническую развязку цепей модема от линии связи.
Модулятор-демодулятор А2 устроен следующим образом. Кроме модема, в состав модуля А2 входят: входной и выходной полосовые фильтры, детектор уровня входного аналогового сигнала, регулятор уровня аналогового выходного сигнала, выключатель сигнала, SPI-порт, цепи цифровых двоичных сигналов данных D (ТхМ и RxM) и управления С (RTC). Модулятор преобразует двоичные данных от контроллера А4 (сигнал ТсМ) в аналоговый частотно-модулированный сигнал. Демодулятор выполняет обратную функцию - преобразует аналоговый частотно-модулированный сигнал в двоичные данные (сигнал RxM) для контроллера А4. Цифровой сигнал RTC используется для включения и выключения выходного аналогового сигнала.
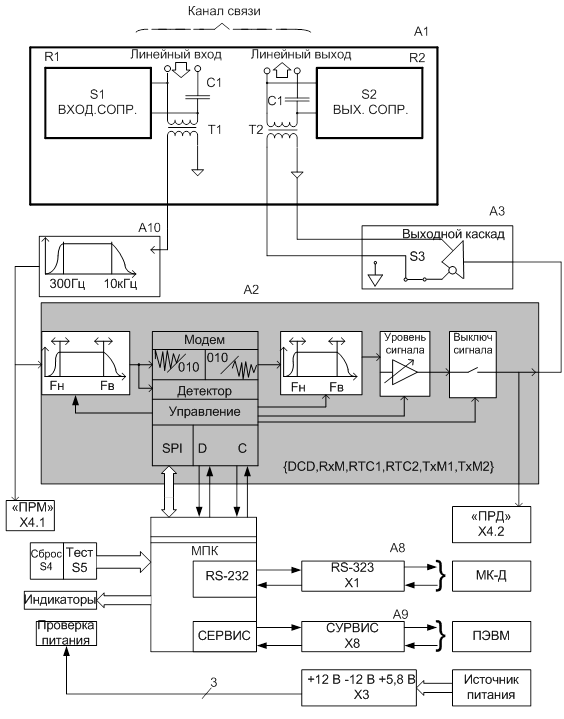
Рис. 20. Функциональная схема модема УКП
Линейный выходной каскад A3 предназначен для согласования с каналом связи и представляет собой преобразователь напряжение - ток, нагрузкой которого является выходной согласующий трансформатор Т2 линейных цепей А1.
Микропроцессор А4 предназначен для управления работой модема УКП и обеспечения взаимодействия между составляющими его устройствами. В частности, он обеспечивает преобразование форматов данных канала связи телемеханики ЛИСНА в формат АСТМУ-А и их дистанционное переключение и выполнение диагностической команды, приходящей по линии связи по 20-му каналу. Микропроцессор также согласовывает скорости обмена данными с модемом (не более 1200 бит/с) и интерфейсом А8 (9600 бит/с) в асинхронном режиме. Контроллер А4 проверяет наличие сигнала о достаточности уровня входного сигнала (сигнал DCD) в модеме А2 и отсутствие ошибок в структуре последовательных данных (сигнал RxM) от модема, осуществляет управление сигналом передатчика модема А2, анализирует состояния и работу схем модема-УКП и выводит соответствующую информацию на индикаторы.
Предварительный полосовой фильтр А10 осуществляет подавление сигналов низкочастотной (менее 250 Гц) и высокочастотной (более 10 кГц) помехи за пределами рабочей полосы частот.
Общие сведения об организации опроса контролируемых пунктовНа каждом КП может быть установлено несколько шкафов и не обязательно одного типа, возможна установка промышленного компьютера подстанции и шкафа (шкафов). Каждое такое устройство (стоика) в протоколе Modbus задается отдельным адресом. Пункт управления организует опрос стоек всех КП.
В каждой стойке на КП имеются буферы с информацией о состоянии контролируемого стойкой оборудования (см. описание контроллера МК-Д). Стойка с промышленным компьютером имеет тип МПК и характеризуется расширенным набором буферов.
Для команд телеуправления и регистра "квитирование" введены названия "командные блоки", которые имеют отдельную нумерацию. Каждый блок команд также разбивается на нумерованную непрерывную последовательность отдельных фрагментов - каналов управления.
На операторской станции ПУ существуют динамические объекты, отображающие на экране монитора состояние реального оборудования и подсистем контролируемых пунктов. Для идентификации динамических объектов им назначаются управляющие имена. Динамические объекты могут принадлежать разным программам операторской станции и некоторые из них могут обмениваться сообщениями. Эти сообщения могут циркулировать как в пределах операторской станции, так и выходить на каналы связи с контролируемыми пунктами. В последнем случае используется протокол Modbus RTF, реализованный с помощью драйвера Modbus операторской станции. Для канала связи обычно используется формат символа без бита паритета с одним стоп-битом.
Чтение данных из каждого буферы КП осуществляется путем посылки операторской станцией команды на чтение буфера. Используется функция 3 протокола Modbus. При успешном чтении данные рассылаются по динамическим объектам. В случае отсутствия квитанции или получения некорректных данных драйвер Modbus пытается повторить запрос. Количество попыток определяется при конфигурировании операторской станции. При исчерпании лимита попыток связи драйвер посылает динамическим объектам сообщение о разрыве связи и код ошибки.
Передача данных заключается в приеме драйвером Modbus значений от динамических объектов программ операторской станции и записи этих значений в блоки команд контроллеров КП. Для каждого канала управления данные передаются отдельным запросом. Используется функция 16-го протокола Modbus, В зависимости от получения или отсутствия квитанции подчиненного КП драйвер формирует код для динамического объекта, выдавшего команду.
Для организации опроса буферы объединяются в группы, обычно в пределах одной стойки. Программное обеспечение позволяет указывать частоту опроса каждого буфера Freq. Диспетчер имеет возможность включать/отключать опрос каждой стойки диспетчерского круга.
В общем случае буферы построены как очереди. При каждом чтении из буфера выбирается самая старая информация. Буфер читается только в случае, если он ни разу не был успешно прочитан после старта программы Modbus или в нем присутствует информация. Данные о наличии информации в буферах указываются в соответствующих каналах регистра "Статус". При отсутствии непрочитанных данных в буфере в соответствующем ему канале регистра "Статус" будет записан логический ноль. После успешного чтения буфера операторская станция посылает логическую единица в канал регистра "Квитирование" и контроллер КП передвигает очередь этого канала.
Во время работы АСТМУ-А на мониторах ПУ отображается мнемосхема объектов тягового электроснабжения и общеподстанционная сигнализация. Диспетчер может отобразить любой объект ТУ/ТС и таблицы телеизмерений любого КП. Вид отображаемого объекта зависит от его состояния. Все поступившие в канал связи или из канала связи сообщения регистрируются на операторской станции.
Библиографический список
1. Методические указания к курсовому проектированию по дисциплине “Автоматизация систем электроснабжения”. Составители: канд. техн. наук А.Д. Родченко, В.Ф. Кудряшов; 1998.
2. Почаевец В.С. Автоматизированные системы управления устройствами электроснабжения железных дорог: Учебник для техникумов и колледжей ж. - д. транспорта. М.: Маршрут, 2003. - 380 с.
3. Автоматизация систем электроснабжения. Под ред. Н.Д. Сухопрудского. - М.: Транспорт, 1990. - 359 с.
4. Оборудование контролируемых пунктов системы телемеханики АСТМУ А: учеб. пособие / А.И. Бурьяноватый, М.А. Иванов, Д.В. Ишкин, А.В. Саморуков, С.Н. Полторак. - СПб.: ПГУПС, 2008. - б2с.