
Рефераты по авиации и космонавтике
Рефераты по административному праву
Рефераты по безопасности жизнедеятельности
Рефераты по арбитражному процессу
Рефераты по архитектуре
Рефераты по астрономии
Рефераты по банковскому делу
Рефераты по сексологии
Рефераты по информатике программированию
Рефераты по биологии
Рефераты по экономике
Рефераты по москвоведению
Рефераты по экологии
Краткое содержание произведений
Рефераты по физкультуре и спорту
Топики по английскому языку
Рефераты по математике
Рефераты по музыке
Остальные рефераты
Рефераты по биржевому делу
Рефераты по ботанике и сельскому хозяйству
Рефераты по бухгалтерскому учету и аудиту
Рефераты по валютным отношениям
Рефераты по ветеринарии
Рефераты для военной кафедры
Рефераты по географии
Рефераты по геодезии
Рефераты по геологии
Рефераты по геополитике
Рефераты по государству и праву
Рефераты по гражданскому праву и процессу
Рефераты по кредитованию
Рефераты по естествознанию
Рефераты по истории техники
Рефераты по журналистике
Рефераты по зоологии
Рефераты по инвестициям
Рефераты по информатике
Исторические личности
Рефераты по кибернетике
Рефераты по коммуникации и связи
Рефераты по косметологии
Рефераты по криминалистике
Рефераты по криминологии
Рефераты по науке и технике
Рефераты по кулинарии
Рефераты по культурологии
Курсовая работа: Разработка системы регулирования температуры смазочного масла турбины
Курсовая работа: Разработка системы регулирования температуры смазочного масла турбины
Министерство общего и профессионального образования РФ
Пензенский государственный университет
Кафедра "Автоматика и телемеханика"
Курсовая работа
Разработка системы регулирования температуры смазочного масла турбины
по курсу «Моделирование систем управления»
Выполнил: студент гр. 02УА2
Размоскин А.Н.
Принял:
доц. Семенов А.Д.
2005
Содержание
Введение
1. Описание объекта управления.
2. Характеристики временных трендов и их оценивание
3. Идентификация объекта управления по временным трендам
4. Расчет характеристик математической модели
5. Выбор и описание закона регулирования, и расчет параметров регулятора
6. Разработка структурной схемы системы
Заключение
Приложение
Задание на проект
Тема работы: «Разработка системы регулирования температуры смазочного масла турбины».
1. Из базы данных оперативных трендов системы управления котельной установки выбрать тренды регулирующей и регулируемой величины.
2. Импортировать преобразованные оперативные тренды в MATLAB и рассчитать статистические характеристики оперативных и исторических трендов (среднее значение, дисперсию, корреляционные функции, спектральные плотности, гистограммы). Привести расчетные формулы и программу преобразования.
3. Провести идентификацию математической модели по параметрам оперативных и исторических трендов. Идентификацию провести, используя приложение MATLAB System Identification Toolbox и рекуррентные методы идентификации. Дать описание используемых методов идентификации и привести программы идентификации.
4. Получить различные формы математических моделей ОУ (ДУ, передаточная функция, модель в пространстве состояний)
5. Рассчитать характеристики математической модели (временные, частотные, собственные векторы собственные значения, матрицы и граммианы управляемости и наблюдаемости, число обусловленности модели).
6. Выбрать закон регулирования тип регулятора.
7. Провести настройку параметров регулятора для полученной модели объекта.
8. Рассчитать временные и частотные показатели качества системы.
9. Провести моделирование системы в Simulink.
Введение
Автоматизация управления является наиболее эффективным средством повышения надежности и экономичности котельной установки. Введение автоматического управления позволяет повысить культуру труда и упростить ее обслуживание. Современная техника автоматизации достигла значительного совершенства, однако автоматизация котельных установок еще не нашла достаточного распространения и развития, особенно с применением современных средств автоматизации использующих микропроцессорное управление, и в ближайшие годы предстоит значительная работа в этой области.
В связи с этим в этой области возникает ряд задач требующих своего решения :
1. Автоматическое регулирование основных параметров котельной установки, таких как давление пара и воды в определенных участках, температура пара, уровень воды в котлах и баках, избыток воздуха в топке, расход топлива. Автоматическое регулирование позволяет повысить к.п.д., увеличить надежность работы, облегчить условия труда и сократить количество обслуживающего персонала.
2. Автоматическое управление рабочими процессами, протекающими в котельных установках, и в первую очередь, динамическими процессами перехода из одного рабочего состояния в другое и аварийными режимами. Примером такой автоматизации является автоматизация пуска турбонасоса при падения давления в питательной магистрали и аварийном выключении другого насоса.
3. Ароматическая тепловая защита, преследующая цель предохранения агрегатов котельной от аварий.
4. Автоматизация дистанционного управления, позволяющая осуществлять дистанционное управление исполнительных органов и вспомогательных механизмов со щита управления.
5. Автоматическая блокировка, обеспечивающая автоматическое включение и выключение группы вспомогательных механизмов и органов управления в определенной последовательности, в соответствии с требованиями технологии. Так в аварийных режимах, автоматическая аварийная блокировка устраняет неправильные действия обслуживающего персонала.
Помимо основных задач автоматизации значительный эффект в упрощении обсаживания и облегчения работы может обслуживающего персонала может быть достигнут и при автоматизации вспомогательных операций, которыми являются:
- оперативный и учетный контроль показывающими и регистрирующими приборами, особенно на тепловых щитах.
- различные виды сигнализации (предупредительной, аварийной, контрольной и командной);
- различные виды связи, обеспечивающие переговоры персонала, находящегося на различных рабочих местах.
Успешное решение выше перечисленных задач достигается введением различных устройств автоматизации, роль и функции которых весьма многообразны, а некоторые из них обязательно имеются во всех современных котельных установках средней и большой мощности. Автоматическому регулированию в первую очередь подвергаются процессы питания котла водой и горения [33].
Автоматическое регулирование процессов горения топлива дает возможность более точного поддержания оптимального соотношения между расходом топлива, воздуха и отсосом продуктов горения. Чем точнее работает комплекс регуляторов процесса горения топлива, тем лучше будут поддерживаться оптимальные соотношения процесса горения, тем выше будет к.п.д. агрегата. Особенно значительный выигрыш от автоматического регулирования процессов горения достигается при нестабильных режимах работы котельных агрегатов. В обычных эксплуатационных условиях отклонение от оптимальных режимов тем больше, чем меньше квалификация, количество и внимательность обслуживающего персонала. Особенно эти различия заметны при одновременном обслуживании нескольких котлов.
Даже при равномерной нагрузке, при автоматическом регулировании горения, повышение к.п.д составляет 2-3 % для мощных агрегатов и до 10% для средних и мелких котлов. При пиковых режимах эти цифры удваиваются.
1. Описание объекта управления
Масляная система предназначена для снабжения маслом системы регулирования и подшипников турбоагрегата.
В системе регулирования и системе смазки применяется турбинные масла марки: Тп-22 по ГОСТ 9972-74, ТП-22С по ТУ 38.10182I-83 (с вязкостью 22сСт при 500С). При эксплуатации этих масел руководствоваться инструкцией по эксплуатации турбинных масел ТИ 34-70-33-84.
Ёмкость масляной системы, включая маслопроводы, составляет около 16 м3.
Масляный бак, общий для системы смазки и системы регулирования, имеет ёмкость 14м3 (до верхнего предельного уровня). Бак снабжён указателем уровня масла и сигнализатором перепада уровня масла на сетчатых фильтрах.
Указатель уровня имеет контакты для подачи световых сигналов при минимальном и максимальном уровнях масла в баке. В масляном баке установлено два ряда сетчатых фильтров.
На масляном баке установлен фильтр тонкой очистки масла от механических примесей. Фильтрация производится пропуском масла через хлопчатобумажную ткань «фильтр-бельтинг». Масло постоянно поступает к фильтру из напорного маслопровода системы смазки до маслоохладителей и после фильтра сливается в грязный отсек маслобака. Производительность фильтра 7,0 м3/час.
Для обеспечения постоянной фильтрации масла на остановленной турбине предусмотрен шестеренчатый масляный насос типа Ш-40-4-18/4-1 по ТУ26-06-1087-84, задающий постоянную циркуляцию масла через фильтр тонкой очистки с расходом 18 м3/час.
Во время работы турбины снабжением маслом системы смазки и системы регулирования обеспечивается центробежным масляным насосом (главным масляным насосом - ГМН), установленным в корпусе переднего подшипника. Вращение насоса производится от вала турбины (РВД), с которым насос соединён зубчатой муфтой, Муфта допускает осевые перемещения РВД при относительном удлинении или укорочении ротора.
Производительность ГМН при частоте вращения ротора турбоагрегата (РТ) 3000 об/мин составляет примерно 4000 литров в минуту при давлении 1,956 Мпа.
Подача масла в систему смазки подшипников осуществляется с помощью двух инжекторов, питаемых силовым маслом с давлением 1,96 Мпа и включенных последовательно по инвертируемому маслу. Первый инжектор обеспечивает на всасывание ГМН подпор с давлением 0,1 Мпа. Второй инжектор подает масло в систему смазки и обеспечивает давление до маслоохладителей около 0,3 Мпа.
Давление масла после маслоохладителей на уровне оси подшипников 0,1 Мпа поддерживается редукционным клапаном.
Для обеспечения маслом турбоагрегата в период пуска и остановки масляная система имеет пусковой электронасос с двигателем переменного тока на 16,6 с-1 (1000 об/мин) – (пусковой масло насос - ПНМ). Этот же масляный насос обеспечивается электродвигателем переменног7о тока на 25 с-1 (1500 об/мин). На этих оборотах ПМН создает в системе регулирования давление 4,0 Мпа, что необходимо ля гидравлического испытания системы регулирования после монтажа или ревизии.
Система смазки имеет резервный маслонасос смазки с электродвигателем переменного тока и аварийный маслонасос с ЭД постоянного тока.
Для отсоса поров масла из бака установлен вентилятор - эксгаустер.
Турбоустановка имеет два маслоохладителя (МО) с поверхностью охлаждения 225 м2 и номинальным расходом масла через каждый МО 165 т/ч. Один МО резервный. Номинальный расход охлаждающей воды через каждый охладитель 150 м3/ч.
Гидравлическое сопротивление МО по маслу - 20 кПа по воде – 20,1 кПа.
Маслоохладители конструкции ПО ЛМЗ герметичные, с трубами, из коррозионно-стойкой стали, которые привариваются к трубным доскам. Конструкция МО обеспечивает плотность и исключает при нормальной эксплуатации возможность попадания масла в воду и наоборот (при этом давление воды больше давления масла).
Рекомендуемая разность давлений между водой и маслом должна быть минимальной.
Система смазки турбины снабжена шестью реле падения давления масла в системе смазки до II предела. Два РПДС используются в схеме защиты, один для включения ЭД аварийного маслонасоса и один для отключения ВПУ.
В защите участвуют одно РПДС с уставкой I предел и два РПДС с уставкой II предел. Срабатывание защиты по давлению масла происходит при условии срабатывания не менее двух РПДС (схема «2 из 3-х).
РПДС, участвующие в схеме защиты, объединены в одну группу, остальные во вторую. Каждая группа имеет самостоятельный подвод напорного масла и вентиль для снижения давления масла в РПДС при испытании.
Маслопроводы турбины снабжаются арматурой, необходимой для нормального её обслуживания, на трубопроводах слива из каждого подшипника имеется смотровое окно.
Основные технические данные МП-165-150-I
Расход масла 165 м3/ч
Расход воды 150 м3/ч
Поверхность охлаждения 225 м2
Число ходов масла 4
Число ходов воды 2
Начальная температура масла 550С
Конечная температура масла 440С
Максимальная температура масла на входе 650С
Начальная температура воды 330С
Конечная температура воды 390С
Максимальная температура воды на входе 370С
Скорость масла (между ребрами труб) 0,33м/с
Скорость воды (в трубах) 2,06м/с
Гидравлическое сопротивление:
- по маслу 20кПа
- по воде 20,1кПа
Максимальное рабочее давление:
- масла 0,5Мпа
- воды 0,5МПа
Функциональная схема системы регулирования температуры смазочного масла приведена на рис. 9. Она содержит два маслоохладителя параллельно подключенных к охлаждающей воде и охлаждаемому маслу. Охлажденное до нужной температуры масло подается в общий трубопровод, где происходит измерение его температуры с помощью термометра сопротивления. ТС. Измерительный сигнал от термометра сопротивлений поступает в регулирующий контроллер, где происходит его сравнение с заданной уставкой. При отклонении температуры масла от заданной контроллер вырабатывает сигнал управления, поступающий на исполнительный механизм М типа МЭО. Исполнительный механизм воздействует не задвижку изменяя расход охлаждающей воды, обеспечивая тем самым стабилизацию температуры масла.
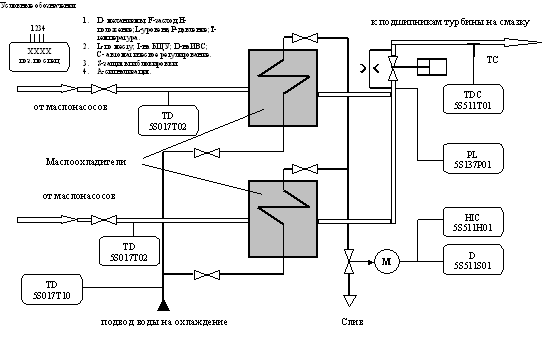
Рис. 1.1. Функциональная схема регулирования температуры масла.
2. Характеристики временных трендов и их оценивание
Внешние воздействия на объект управления могут быть полезными (управляющими сигналами u) и помехами (возмущающими воздействиями f). Управляющие сигналы, вырабатываемые устройством управления, являются полностью наблюдаемыми. Возмущающие воздействия, в отличие от них, как правило, ненаблюдаемые и случайные сигналы. В результате выходные переменные объекта y(t) определяются не только входными сигналами x(t), но и ненаблюдаемыми и неуправляемыми воздействиями (помехами), что вызывает неконтролируемые отклонения выходных переменных от заданных значений. При повторения процессов управления, происходящих в системе, выходные переменные могут иметь различные значения при одних и тех же значениях времени отсчитываемых от начала процесса. Выходная величина объекта при каждом повторном цикле управления, в этом случае, представляет собой реализацию одного и того же случайного процесса управления.
Таким образом, под действием ненаблюдаемых, неуправляемых и случайных внешних воздействий наблюдаемые переменные объекта также становятся случайными сигналами, являющимися реализациями случайного процесса управления. Для количественной оценки и сравнения различных случайных сигналов используют различные характеристики этих сигналов, представляющие собой абстрактные математические понятия, которые существуют объективно, но не могут быть измерены или определены в строгом смысле слова.
К таким характеристикам относятся
1. Функция распределения вероятностей случайного процесса, или интегральная функция распределения. F(y,t), Функция распределения вероятностей, это вероятность того, что случайный процесс x(t) в момент времени t принимает значения меньше у
![]() . (2.1)
. (2.1)
2. Плотность вероятностей, или дифференциальное распределение (распределение) w(x,t).
 , (2.2)
, (2.2)
откуда  . (2.3)
. (2.3)
3. Математическое ожидание случайного процесса
![]() ,
,
 . (2.4)
. (2.4)
4. Дисперсия случайного процесса
 , (2.5)
, (2.5)
или ![]() . (2.6)
. (2.6)
5. Корреляционная (автокорреляционная) функция Rxx(t1,t2) . Корреляционная функция это математическое ожидание произведений двух значений одного и того же сигнала, сдвинутых по времени.
![]() . (2.7)
. (2.7)
6. Взаимная корреляционная функция Rxy(t1,t2). Взаимная корреляционная функция это математическое ожидание произведений двух сигналов один из которых сдвинут относительно другого по времени.
![]() . (2.8)
. (2.8)
Точное определение этих характеристик невозможно, так как неизвестен вид закона распределения и конечно число реализаций случайного процесса. Поэтому в реальных условиях эти характеристики вычисляют приблизительно, оценивая их с какой-то погрешностью.
Оценка характеристик случайных процессов проводится на основе роинятия гипотез о стационарноси и эргодичности случайного процесса.
Случайный процесс называют стационарным , если характеризующая его функция распределения не зависит от времени. Отсюда следует, что от времени не будут зависеть и все характеристики случайного процесса. Условие стационарнрсти значительно упрощает вычисление характеристик случайных процессов, так как в выражениях (2.1) - (2.8) исчезает аргумент времени. Однако и вэтом случае для вычисления характеристик необходимо достаточно большое количество независимых реализаций случайного процесса (ансамбль реализаций).
Эргодическая гипотеза позволяет заменить ансамбль реализацй одной реализацией снятой за достаточно продолжительный интервал времени. Согласно эргодической гипотезе средние значения случайного сигнала по множеству и времени совпвдают.
 . (2.9)
. (2.9)
Тогда для случайных стационарных эргодических процессов оценки их характеристик (2.1) - (2.8) с учетом конечности времени наблюдения Т , записываются в следующем виде.
1. Оценка математического ожидания
 . (2.10)
. (2.10)
2. Оценка дисперсии
 , (2.11)
, (2.11)
или  . (2.12)
. (2.12)
3. Оценка корреляционнгой функции
 , (2.13)
, (2.13)
где ![]() -
центрированный случайный сигнал.
-
центрированный случайный сигнал.
Корреляционную функцию центрированного сигнала еще называют ковариационной или автоковариационной функцией.
4. Спектральная
плотность мощности ![]() , связанная с корреляционной
функцией преобразованием Фуре.
, связанная с корреляционной
функцией преобразованием Фуре.
 . (2.14)
. (2.14)
Для получения
приемлемой точности оценох характеристик случайных процессов длительность
реализации процесса по которой вычисляются оценки должна превышать интервал
корреляции. Интервал корреляции ![]() ето значение аргумента
корреляционной функции начиная с которого все ее последующие значения не
превышают
ето значение аргумента
корреляционной функции начиная с которого все ее последующие значения не
превышают ![]() .
.
Более подробно о вычислении характеристик случайных процессов и их оценок можно познакомиться в специальной литературе [8, 12, 23, 25, 27, 31, 32, 38, 49, 54, 59, 63, 77, 99].
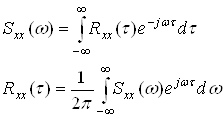
На рис.2.1- 2.4 приведены статистические характеристики временных трендов системы.
Рис. 2.1. Временные тренды входного и выходного сигналов
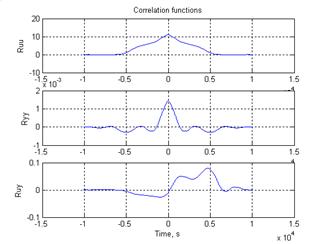
Рис. 2.2. Корреляционные функции входного и выходного сигналов.
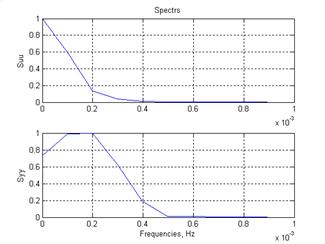
Рис. 2.3. Спектральные плотности входного и выходного сигналов.
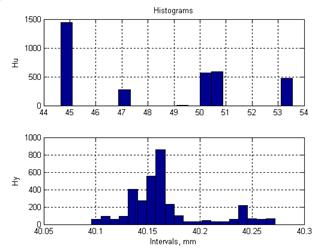
Рис. 2.4. Гистограммы входного и выходного сигналов.
3. Идентификация объекта управления по временным трендам
3.1 Основные понятия теории идентификации
Идентификация (отождествление) в технике связана с процессом построения модели исследуемого объекта. В дальнейшем под идентификацией понимается процесс построения математической модели технического устройства (объекта) по его измеряемым входным и выходным сигналам. При этом под объектом можно понимать любые материальные (физические процессы, технические объекты) и нематериальные (знаковые) элементы и системы Класс рассматриваемых моделей охватывает статические и динамические модели, описываемые соответственно алгебраическими и обыкновенными дифференциальными уравнениями.
С развитием и широким распространением быстродействующих вычислительных машин и аппаратуры дистанционного измерения и передачи данных (телеметрической аппаратуры) наметилась тенденция к полной автоматизации процессов построения математических моделей объектов и созданию адаптивных систем управления, самонастраивающихся микропроцессорных регуляторов для различных технических систем. Так, для идентификации широко привлекаются известные в статистике методы наименьших квадратов, максимального правдоподобия, стохастической аппроксимации и их разновидности [2, 3, 9, 23, 30, 32, 33, 73, 82, 99, 100].
Построение математической модели достаточно сложного объекта представляет собой довольно трудоемкий процесс, включающий этапы выбора вида и структуры модели идентифицируемого объекта, выбора или разработки метода и численных алгоритмов идентификации с учетом возможностей телеметрической аппаратуры и вычислительных средств, предварительной (первичной) обработки результатов телеизмерений, получения оценок характеристик модели, анализа этих оценок и проверки степени идентичности (адекватности) модели и реального объекта. Задача каждого из указанных этапов составляет весьма сложную проблему. Решение ее немыслимо без глубокого знания соответствующих дисциплин и теории. В целом же инженеру, работающему в области идентификации технических объектов, необходимо достаточно свободно ориентироваться в теории вероятностей, современной математической статистике и вычислительной математике, а также иметь представление о теории моделирования, теории управления и принципах построения и функционирования идентифицируемых объектов.
В настоящее время проблемы, связанные с созданием математических моделей объектов технологических процессов, экономики и живой природы, формируют одно из основных направлений науки и техники – моделирование. Это объясняется тем, что математические модели объектов широко применяются как при создании систем управления этими объектами, так и при их эксплуатации.
Объекты и системы представляют собой совокупность материальных тел, находящихся в непрерывном взаимодействии друг c другом и с окружающей средой. Построение математической модели объекта может производиться несколькими методами: аналитическим, экспериментальным и экспериментально-аналитическим [49, 57, 73, 100].
Аналитический метод предусматривает получение математического описания объекта на основе законов физики, механики, химии и т. д. Такой подход дает положительный результат, если рассматриваемый объект достаточно прост по структуре и хорошо изучен. Если же объект изучен недостаточно или же настолько сложен, что аналитическое описание его математической моделью практически невозможно, прибегают к экспериментальным методам, суть которых сводится к статистической обработке технологических данных. При экспериментально-аналитическом методе априорная модель, полученная аналитическим путем, уточняется в соответствующих экспериментах.
Взаимодействие объекта с окружающей средой поясним с помощью простейшей схемы (рис. 3.1). Воздействия внешней среды на объект в обобщенном виде изображены стрелками, направленными к объекту и обозначенными через x и v. Объект, в свою очередь, воздействует на окружающую среду. Это воздействие показано стрелкой, направленной от объекта и обозначенной через y. Величину y принято называть выходным воздействием или выходной величиной объекта.
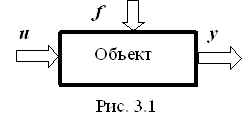
Рассмотрим более подробно воздействие среды на объект. Совокупность таких воздействий окружающего мира на объект можно разделить на две группы в соответствии с характером влияния среды на переменные состояния (фазовые координаты) объекта. В первую группу входят те воздействия, которые в точке приложения изменяют переменные состояния аддитивно. Это означает, что сигналы, пропорциональные этим воздействиям, суммируются с сигналами, пропорциональными соответствующим переменным состояния.
Эти воздействия называют «входными», или «внешними», воздействиями. В дальнейшем будем называть эти воздействия «входными». Входные воздействия могут быть полезными (управляющими сигналами u) и помехами (возмущающими воздействиями f).
Вторая группа воздействий внешней среды изменяет переменные состояния объекта косвенно, обычно не аддитивно. Эти воздействия приводят к изменению оператора объекта (системы) А, под которым понимают закон преобразования входных воздействий в выходные переменные объекта. Вторую группу воздействий будем называть операторной, а воздействия – операторными.
Так, например, повышение температуры электродвигателя приводит к падению мощности и даже выходу его из строя.
В общем случае входные и выходные воздействия могут описываться определенными функциями (обычно функциями времени). Математически соответствие между входной и выходной функциями можно записать в виде выражения
![]() (3.1)
(3.1)
где A(f) – оператор, зависящий от
возмущений (операторных воздействий); ![]() – вектор выходных координат
объекта;
– вектор выходных координат
объекта; ![]() –
вектор управления (входа).
–
вектор управления (входа).
Оператор объекта является его математической характеристикой, т. е. математической моделью объекта.
Примерами операторов могут быть:
– оператор дифференцирования p:
![]() ; (3.2)
; (3.2)
– дифференциальный оператор D(y) :
 , (3.3)
, (3.3)
– оператор обыкновенного линейного дифференциального уравнения n-го порядка L(y)
 , (3.4)
, (3.4)
– линейный интегральный оператор
 , (3.5)
, (3.5)
где ![]() – функция веса объекта;
– функция веса объекта;
Математически операторы определяются в соответствующих пространствах, т. е. на множествах элементов, над которыми совершаются преобразования. Примерами таких пространств являются пространства: непрерывных функций; непрерывных функций, имеющих непрерывные производные до n-го порядка (n > 0); функций с суммируемым квадратом и т. д. Множества входных и выходных сигналов объектов и систем могут рассматриваться как те или иные метрические пространства [4,12, 13, 37, 44].
Формально оператор характеризуется структурой и параметрами. Так, структура дифференциального оператора (1.3) определяется его порядком n. Для оператора дифференциального уравнения (1.4) структура задается его порядком n, а параметрами служат величины ai(t), [i = 0, n]. Таким образом, задачу идентификации в общем виде можно ставить как задачу определения оператора объекта, преобразующего входные воздействия в выходные.
3.2 Основные задачи идентификации
Рассмотрим различные постановки задачи идентификации. Как уже отмечалось выше, в общем виде задача идентификации заключается в определении оператора объекта, преобразующего входные воздействия в выходные. В связи с этим выделят задачи структурной и параметрической идентификации.
При структурной идентификации определяют структуру и вид оператора объекта, или другими словами вид математической модели объекта.
После того как математическая модель объекта определена, проводят параметрическую идентификацию, заключающуюся в определении числовых параметров математической модели.
Задачей структурной идентификации является представление реального объекта управления в виде математической модели. Конкретный выбор математической модели зависит от типа объекта.
Для описания больших систем и объектов, таких как социальные, производственные, финансово-экономические, используются семиотические (знаковые) и лингвистические модели, базирующиеся на теории множеств и абстрактной алгебры.
В качестве математических моделей технических систем применяются дифференциальные уравнения в обыкновенных и частных производных. Причем при решении задач управления предпочтение отдается моделям в пространстве состояний и структурированным моделям, описываемым дифференциальными уравнениями в обыкновенных производных.
Задачу параметрической идентификации можно сформулировать следующим образом [29]. Пусть имеется полностью наблюдаемый и полностью управляемый объект, задаваемый уравнениями состояния
 , (3.6)
, (3.6)
где B -
n-мерный вектор –столбец, а C - n-мерный вектор
–строка, А – квадратная матрица размером ![]() . Элементы этих векторов А В
и С неизвестные числа. Целью идентификации является
определение этих чисел.
. Элементы этих векторов А В
и С неизвестные числа. Целью идентификации является
определение этих чисел.
Под идентификацией в дальнейшем будем понимать нахождение параметров моделей объектов, предполагая, что уравнения моделей заранее известны и задаются с помощью обобщенной структурной схемы объекта (рис. 3.2), т.е. будем рассматривать вопросы параметрической идентификации.
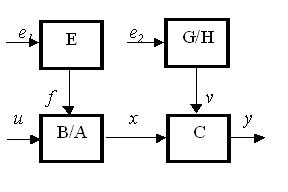
Рис. 3.2
На схеме приняты следующие обозначения:
u и y – наблюдаемые входной и выходной сигналы;
x – ненаблюдаемая (скрытая) переменная, оцениваемая косвенно по сигналам u и y , получаемым в результате преобразования в системе операторами А В и H;
е1 и е2 – ненаблюдаемые помехи (случайные процессы типа белого шума);
f и v – ненаблюдаемые помехи (коррелированные во времени случайные сигналы, в некоторых случаях содержащие детерминированные составляющие);
A, B, C, E, G, H – операторы, вид которых известен, но неизвестны параметры.
Основными постановками задач идентификации являются:
– идентификация, или определение характеристик объекта (по значениям u и y определить операторы А, В иC);
– генерация случайных сигналов с заданными характеристиками, или определение характеристик сигналов (по значениям f или v определить оператор E или G, H);
– наблюдение за скрытыми переменными, или определение переменных состояния (по наблюдаемым u и y, известным операторам A, B, C, E, G, H определить x).
Решение вышеназванных задач идентификации осуществляется методами параметрической и непараметрической идентификации. При использовании методов параметрической идентификации сразу определяются коэффициенты передаточной функции или уравнения объекта. Вторая группа методов используется для определения временных или частотных характеристик объектов, а также характеристик случайных процессов генерируемых объектами. По полученным характеристикам затем определяются передаточная функция или уравнения объекта. В настоящее время более широкое распространение получили методы параметрической идентификации.
3.3 Метод наименьших квадратов
Параметрическая идентификация моделей объектов позволяет сразу находить значения коэффициентов модели объекта по измеряемым значениям управляемого y и управляющего u сигналов объекта. При этом предполагается, что структура и порядок модели объекта уже известен. Измеряемые значения y и u представляются в виде временного ряда, поэтому в результате идентификации оцениваются параметры АРСС – модели объекта, или параметры его дискретной передаточной функции. Зная коэффициенты АРСС – модели и ее структуру можно перейти к непрерывным структурированным моделям и моделям в пространстве состояний, как это делалось в п. 2.4.
В задачах параметрической идентификации используются модели объекта с шумом измерений, задаваемые передаточными функциями и структурой рис. 3.2. Считая порядки моделей заданными, задачей параметрической идентификации стохастической системы считается определение оценок коэффициентов полиномов модели A,B,C и D по результатам измерений входа u(t) и выхода y(t). Свойства получаемых оценок (состоятельность, несмещенность и эффективность) зависят от характеристик внешних возмущений и метода идентификации, при этом существенную роль играет вид закона распределения внешних возмущений.
Важным преимуществом методов параметрической идентификации является возможность использования рекуррентных алгоритмов, позволяющих проводить текущую идентификацию в реальном времени при номинальных режимах работы объекта. Эти преимущества определили широкое использование методов параметрической идентификации в задачах управления и автоматизации. К таким методам относятся: метод наименьших квадратов, метод максимального правдоподобия и метод стохастической аппроксимации .
Подставим в уравнение АРСС - модели значения сигналов y(k) и u(k), а также оценки параметров объекта, полученные после (k – 1) - го такта [32]:
![]() . (5.1)
. (5.1)
В этом уравнении ноль, стоящий в правой части уравнения (получающийся после переноса всех слагаемых в левую часть) заменен величиной ошибки e(k). Она отражает наличие погрешности измерений выхода и неточность оценок параметров модели ai и bi. Обозначим значение y(k) как значение y(k/k – 1), предсказанное в момент (k – 1) на момент k. Тогда
![]() , (3.6)
, (3.6)
Или ![]() , (3.8)
, (3.8)
где ![]() - вектор оценок,
- вектор оценок,
![]() - вектор данных,
- вектор данных,
d – величина дискретного запаздывания.
Ошибка уравнения e(k) будет иметь вид
![]() , (3.9)
, (3.9)
где y(k) – новое измерение; y(k/k-1) – предсказанное значение измерения.
Предположим, что измерения выполнены на интервале
k = 1, 2, ..., n + d + N
а порядок АРСС – модели (n, n). Тогда на основании (3.8) (5.4)получим векторно-матричное уравнение вида
![]() , (3.10)
, (3.10)
где ![]() - вектор выхода,
- вектор выхода,
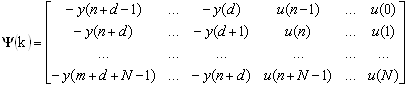 - матрица данных,
- матрица данных,
![]() – вектор ошибок.
– вектор ошибок.
Функция потерь по критерию наименьших квадратов определяется как квадрат ошибки, что в векторном представлении дает
![]() , (3.11)
, (3.11)
а ее минимум находится из условия
 . (3.12)
. (3.12)
Полагая, что N ³ 2n, обозначим
![]() , (3.13)
, (3.13)
тогда оценка минимизирующая функцию потерь (3.11)будет иметь вид:
![]() . (3.14) .
. (3.14) .
Алгоритм (3.14) –
нерекуррентный алгоритм идентификации по методу наименьших квадратов, так как
вычисление оценок параметров модели ![]() производится лишь после того как
сформирован весь массив входных и выходных данных объекта
производится лишь после того как
сформирован весь массив входных и выходных данных объекта
![]() .
.
Рекуррентный алгоритм МНК
получается после записи новой ![]() и старой
и старой![]() оценок и вычитания одной из
другой:
оценок и вычитания одной из
другой:
![]() . (3.15)
. (3.15)
Вектор коррекции определяется из соотношения:
 . (3.16)
. (3.16)
Вектор ![]() на следующем шаге
вычисляется как
на следующем шаге
вычисляется как
![]() . (3.17)
. (3.17)
Рекуррентный алгоритм метода наименьших квадратов реализуется в следующей последовательности.
1. Задаются начальные значения вектора оценок параметров модели и вектора данных:
![]() ,
,
где ![]() – достаточно большое
число, I – единичная матрица соответствующей размерности.
– достаточно большое
число, I – единичная матрица соответствующей размерности.
2. Производятся измерения входного и выходного
сигналов объекта, и формируется новый вектор данных ![]() .
.
3. Вычисляется вектор коррекции ![]() по формуле (3.16)
по формуле (3.16)
4. Находится новая оценка параметров ![]() по формуле (3.15)
по формуле (3.15)
5. Вычисляется новый вектор ![]() по формуле (3.16)
по формуле (3.16)
Обычно для промышленных объектов характерна коррелированность во времени шумов, действующих на объект. Использование обычного МНК при таком шуме, т. е. при минимизации выражения (3.11), вызывает смещение оценок параметров, увеличение дисперсии этих оценок. Ухудшение этих оценок, в свою очередь, приводит к ухудшению свойств оценок переменных состояния х(k) и в итоге к снижению качества управления.
Для получения несмещенных оценок используется обобщенный МНК (ОМНК).
При использовании ОМНК оцениваются параметры моделей объекта и шума на его выходе. Идентификации подвергается модель максимального правдоподобия (МП - модель) для которой связь между переменными задается уравнением
![]() . (3.18)
. (3.18)
Вводя расширенные векторы данных
![]() (3.19)
(3.19)
и параметров
![]() , (3.20)
, (3.20)
выход ной сигнал объекта можно записать через (5.13) и (5.14)
![]() . (3.21)
. (3.21)
Так как сигнал помехи е(к)
неизвестен, то используется его оценка ![]() , определяемая из уравнения
, определяемая из уравнения
![]() . (3.22)
. (3.22)
Оценки параметров МП - модели вычисляются аналогично как в МНК по формулам (3.15) – (3.17).
На рис. 3.3. -3 показаны результаты идентификации.
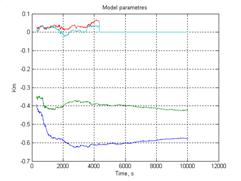
Рис. 3.3. Коэффициенты АРСС – модели объекта.
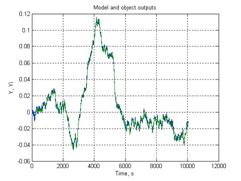
Рис. 3.4. Выходные сигналы объекта и модели.
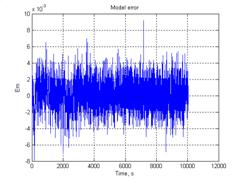
Рис. 3.4. Ошибка идентификации.
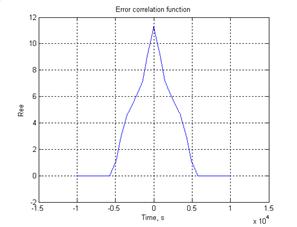
Рис. 3.5. Корреляционная функция ошибки идентификации.
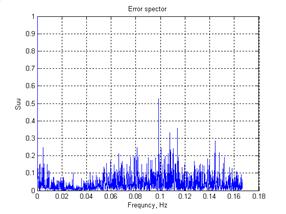
Рис. 3.5. Спектральная плотность ошибки идентификации.
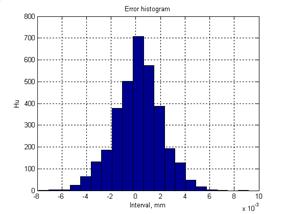
Рис. 3.6. Гистограмм ошибки идентификации.
4. Расчет характеристик математической модели объекта управления
4.1 Математические модели в пространстве состояний
Математическая модель (образ) представляет собой абстрактное отражение реального объекта (оригинала, прообраза). В зависимости от типа объекта и целей, ради которых строится и используется модель, формальное описание может быть различным. Для моделирования объектов могут быть использованы структурные схемы, операторные уравнения, алгебраические уравнения, дифференциальные, интегральные и интегро-дифференциальные уравнения, Марковские цепи, передаточные функции, частотные характеристики, весовые функции, графы и т. д. Все эти методы функционально связывают входные и выходные сигналы объекта. По количеству входов и выходов объекты и соответствующие им модели разделяют на одномерные и многомерные. Одномерными называют объекты, имеющие один вход и один выход, многомерными – объекты, имеющие несколько входов и выходов, причем число входов не обязательно равно числу выходов. Блок-схемы одномерного и многомерного объектов изображены соответственно на рис. 4.1,а и рис. 4.1,б. Причем число входов не обязательно равно числу выходов.
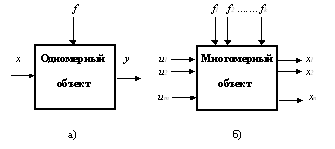
Рис. 4.1.
Наиболее полно идентифицируемый объект описывается в терминах пространства состояний. Под состоянием объекта понимается совокупность величин xi, полностью определяющих его положение в данный момент времени.
Наиболее употребительной моделью динамических объектов являются дифференциальные уравнения. Будем рассматривать только объекты с сосредоточенными параметрами, которые описываются обыкновенными дифференциальными уравнениями. Порядок системы дифференциальных уравнений, описывающей модель объекта, непосредственно не определяется количеством входов и выходов, а зависит от операторов, преобразующих входные сигналы в выходные.
Для динамических систем, в которых физические процессы протекают непрерывно во времени, скорости изменения переменной состояния объекта можно также задать вектором
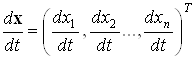 , (4.1)
, (4.1)
где ![]() ,
, ![]() – скорости изменения
компонент многомерной переменной состояния.
– скорости изменения
компонент многомерной переменной состояния.
В свою очередь эти скорости определяются текущими
значениями переменной состояния ![]() , управлениями
, управлениями ![]() и возмущениями
и возмущениями ![]() , действующими
на объект
, действующими
на объект
![]() , (4.2)
, (4.2)
где g = (g1, ..., gn)T – вектор функция; x10 , x20. .., xn0 – начальные условия.
Если g( ) – нелинейная функция, то решение уравнения (4.2) усложняется, так как сводится к интегрированию системы нелинейных ДУ. Так как методы интегрирования систем ДУ хорошо разработаны только для линейных систем, то перед работой с ними необходимо линеаризовать g( ) в окрестности рабочей точки, которой соответствует установившейся режим работы объекта.
Для линеаризованной функции g( ) ДУ вида (4.2) с учетом воздействия среды можно представить в векторной форме:
![]() , (4.3)
, (4.3)
где A(t); B(t); E(t) – матрицы преобразования, элементы которых в общем случае являются функциями времени.
Элементы xi
в уравнении (4.3) называются переменными состояния объекта или фазовыми
координатами. Переменные состояния ![]() (фазовые координаты) образуют
вектор состояния, переменные управления
(фазовые координаты) образуют
вектор состояния, переменные управления ![]() и возмущения
и возмущения ![]() образуют векторы
управления и возмущения. Множество этих векторов составляет пространство
состояний (фазовое пространство) X, пространство управлений U
и возмущений F.
образуют векторы
управления и возмущения. Множество этих векторов составляет пространство
состояний (фазовое пространство) X, пространство управлений U
и возмущений F.
Во многих физических
объектах регулируются, измеряются и передаются по информационным каналам не
значения вектора состояния ![]() , а другие значения – функции
составляющих вектора фазовых координат, называемые управляемыми или выходными
величинами. Обозначим измеряемые величины через y1(t), y2(t),...,
ys(t), причем обычно s £ n. Тогда уравнение измерения, связывающее регулируемые и фазовые
координаты объекта примет вид
, а другие значения – функции
составляющих вектора фазовых координат, называемые управляемыми или выходными
величинами. Обозначим измеряемые величины через y1(t), y2(t),...,
ys(t), причем обычно s £ n. Тогда уравнение измерения, связывающее регулируемые и фазовые
координаты объекта примет вид
![]() . (4.4)
. (4.4)
Для линейного объекта это соотношение линейное:
![]() . (4.5)
. (4.5)
Матрица С(t)
называется матрицей измерения. Она показывает, как изменяются значения вектора
состояний при измерении. При измерениях, описываемых выражениями (4.4) и (4.5),
вектором выходных сигналов (или просто вектором выхода) является вектор ![]() . Отметим, что
между векторами входа, выхода и состояния существует принципиальное различие.
Если все составляющие вектора входа и вектора выхода являются вполне
конкретными физическими величинами, то элементами вектора состояния могут быть некоторые
абстрактные переменные, физическая природа которых не всегда определена.
. Отметим, что
между векторами входа, выхода и состояния существует принципиальное различие.
Если все составляющие вектора входа и вектора выхода являются вполне
конкретными физическими величинами, то элементами вектора состояния могут быть некоторые
абстрактные переменные, физическая природа которых не всегда определена.
Векторно-матричная запись модели линейного динамического объекта с учетом уравнения измерения принимает вид:
 . (4.6)
. (4.6)
Если матрицы A(t), B(t) и C(t) не зависят от времени, то объект называется объектом с постоянными коэффициентами, или стационарным, объектов. В противном случае объект будет нестационарным.
При наличии погрешностей при измерении, выходные (регулируемые) сигналы задаются линеаризованным матричным уравнением:
![]() , (4.7)
, (4.7)
где ![]() – вектор регулируемых
(измеряемых) величин; C(t) – матрица связи вектора измерений с
вектором состояний; v(t) – вектор ошибок измерений
(помехи).
– вектор регулируемых
(измеряемых) величин; C(t) – матрица связи вектора измерений с
вектором состояний; v(t) – вектор ошибок измерений
(помехи).
Структура линейной непрерывной системы, реализующая уравнения (4.6) и (2.7) приведена на рис. 4.2.
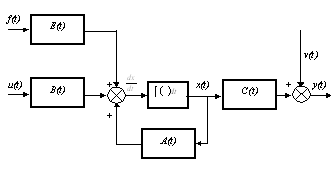
Рис. 4.2.
Данная структура соответствует математической модели объекта построенной в пространстве состояний его входных x(t), u(t), выходных y(t) и внутренних, или фазовых координат x(t).
4.2 Структурированные модели
Реальные объекты управления представляют собой совокупность отдельных элементов и блоков соединенных между собой посредством связей. Поэтому в практике гораздо удобнее бывает представлять математическую модель всей системы, как совокупность относительно простых математических моделей отдельных элементов и блоков объекта, т.е. структурированную модель. Такая форма математического описания в отличии от (4.6) отражает не только физические, но и технические принципы построения системы управления и позволяет исследовать процессы происходящие не только в системе в целом, но и процессы в отдельных ее элементах.
Структурированные модели, учитывающие техническую организацию систем управления, создаются на основе следующих допущений:
1. Все элементы системы являются простейшими звеньями, т.е. имеют один вход и один выход. Если звено характеризуется несколькими обобщенными координатами, то в качестве выходной величины выбирается та координата, которая является выходной или регулируемой величиной звена.
2. Все звенья, из которых состоит система, является детектирующими. В детектирующем звене выходная величина зависит только от входной. Если выходная величина звена оказывает влияние на входную, то звено называется недетектирующим.
Допущения о том, что в состав системы управления должны входить только детектирующие звенья не сужает область применения структурированных моделей, так как недетектирующее звено может рассматривать как совокупность детектирующих звеньев охватываемых обратной связью.
Таким образом, структурированная модель системы управления разбивается на ряд взаимосвязанных математических моделей отдельных звеньев. Тогда, последовательно, исключая из рассмотрения все внутренние переменные, являющиеся входными или выходными сигналами внутренних звеньев, можно найти дифференциальное уравнение описывающее взаимосвязь входной и выходной величины системы в виде.
 , (4.8)
, (4.8)
где ![]() - постоянные
коэффициенты;
- постоянные
коэффициенты;
n - порядок системы.
Для реальных физически реализуемых систем управления m < n .
Подвергая (4.8) преобразованию Лапласа при нулевых начальных условиях получим алгебраическое уравнение, связывающее изображения по Лапласу от входной X(p) и выходной Y(p) величины объекта
![]() , (4.9)
, (4.9)
где p – оператор Лапласа
Последнее уравнение можно представить в виде:
 . (4.10)
. (4.10)
Это отношение называется передаточной функцией объекта и обозначается символом W(p).
Передаточной функцией системы называется отношение выходной величины к входной, преобразованных по Лапласу при нулевых начальных условиях и возмущениях. Зная передаточную функцию системы или звена можно легко получить дифференциальное уравнение в форме (4.8), справедливо также и обратное утверждение.
Введение векторных переменных при рассмотрении многомерных объектов позволяет для линейных систем использовать привычный аппарат передаточных функций и структурных схем, однако понятие передаточной функции значительно расширяется.
Пусть имеется многомерный объект управления со структурной схемой рис. 4.1 б. По аналогии с одномерными системами (4.9) можно записать:
![]() , (4.11)
, (4.11)
где Q(p)-квадратная матрица операторных коэффициентов размера
 ,
,
R(p)- прямоугольная матрица операторных коэффициентов размера
 ,
,
S(p)- прямоугольная матрица операторных коэффициентов размера
 .
.
Для получения системы
дифференциальных уравнений необходимо перемножить прямоугольную или квадратную
матрицы на матрицы - столбцы соответствующих переменных объекта. Взаимосвязь
уравнений состояния (4.6) с уравнениями системы в виде (4.11) определяется из
следующих соотношений. Из второго уравнения (4.6) выразим переменную ![]() через
через ![]()
![]() (4.12)
(4.12)
и подставим это выражение в первое уравнение (4.6)
![]() . (4.13)
. (4.13)
Преобразовывая по Лапласу (4.13) и группируя подобные члены, получим выражение аналогичное (4.11).
![]() , (4.14)
, (4.14)
где ![]() - единичная матрица.
- единичная матрица.
Полагая ![]() , а
, а ![]() найдем взаимосвязь
параметров структурированной модели и модели в пространстве состояний
найдем взаимосвязь
параметров структурированной модели и модели в пространстве состояний
![]() ,
, ![]() ,
, ![]() . (4.15)
. (4.15)
По аналогии с одномерными системами, используя основные правила теории матриц, можно ввести понятие матрицы передаточной функции.
Если умножить (4.14) на
обратную матрицу ![]() , то получим:
, то получим:
![]() (4.16)
(4.16)
Отсюда можно получить выражение для матриц передаточных функций системы по управлению
![]() (4.17)
(4.17)
и возмущению
![]() (4.18)
(4.18)
Как для одномерных, так и для многомерных систем одной и той же матрице передаточной функции может соответствовать несколько вариантов структурных схем и уравнений состояния. Т.е. по уравнениям состояния матрица передаточной функции может быть получена однозначно, обратное утверждение будет неверным. Это связано с тем, что при получении выражения передаточной функции исключаются из рассмотрения все внутренние переменные структурированной модели, которые нельзя уже восстановить по выражению передаточной функции.
4.3 Дискретные модели
При анализе стохастических систем, встречающихся в самых различных областях науки и техники, исходными данными для анализа являются реализации случайного процесса генерируемого этой системой. Полученные в виде графиков, или осциллограмм, реализации случайного процесса обрабатываются и представляются в виде временного ряда. Временной ряд содержит ординаты реализации случайного процесса снятые в дискретные и равноотстоящие моменты времени. Следовательно, о свойствах исходной непрерывной системы судят по результатам цифровой обработки сигналов (временных рядов) формируемых системой. В связи с этим широкое распространение получили цифровые параметрические стохастические модели авторегрессии и скользящего среднего (АРСС-модели). Эти модели достаточно просты и включают обычно небольшое число параметров, которые необходимо оценивать по наблюдениям. АРСС-модели могут быть использованы как для изучения временных рядов, так и при определении статистических характеристик этих рядов. Широко используются такие модели в управлении, экономике, медицине, геофизике, при обработке звуковых сигналов [3, 6, 9, 11, 33, 56, 101].
АРСС процессом порядка (p, q) называется ряд
 , (4.19)
, (4.19)
где v(k) – значения временного ряда в k-й момент времени;
e(k) – последовательность независимых, одинаково распределенных случайных величин с нулевым математическим ожиданием и единичной дисперсией (белый шум);
{ci, i = 1, p} –параметры авторегрессии;
{dj, j = 1, q} – параметры скользящего среднего.
Частными случаями АРСС (p, q) процессов является процесс АР(p) – авторегрессии порядка p:
 , (4.20)
, (4.20)
и процесс СС(q) – скользящего среднего порядка q:
 . (4.21)
. (4.21)
Уравнения (4.19) и (4.20) описывают рекурсивные фильтры, а уравнение (4.21) – трансверсальный фильтр [38]. Таким образом, процессы АРСС (p, q), АР(p) и СС(q) можно рассматривать как отклики соответствующих линейных фильтров на входной бело-шумный процесс {e(tk)}. Следовательно, условиями стационарности этих процессов являются условия устойчивости соответствующих фильтров: рекурсивный фильтр устойчив, если все корни характеристического уравнения
![]()
находятся внутри окружности единичного радиуса [30]. Трансверсальный фильтр порядка q устойчив без ограничения на параметры.
Если в в качестве стохастической системы рассматривается одномерный объект управления, то АРРС- модель объекта примет вид
 , (4.22)
, (4.22)
где y(k), u(k) выходная и входная координаты объекта.
Аналогично (4.19) АР-модель запишется как
 , (4.23)
, (4.23)
а СС-модель
 . (4.24)
. (4.24)
Уравнения (4.22) – (4.24) являются линейными разностными уравнениями объекта управления.
Используя z – преобразование их можно записать в символической форме.
АРСС –модель
![]() , (4.25)
, (4.25)
АР – модель
![]() , (4.26)
, (4.26)
СС – модель
![]() , (4.27)
, (4.27)
где y(z), u(z) и e(z) – z –изображения соответствующих сигналов;
![]() ,
, ![]() - коэффициенты уравнения.
- коэффициенты уравнения.
Вводя дискретную передаточную функцию объекта, как отношение z –изображений сигнала на входе к сигналу на выходе при нулевых начальных условиях можно записать
 . (4.28)
. (4.28)
При наличии
запаздывания в объекте равному целому число периодов дискретизации ![]() выражение для
дискретной передаточной функции необходимо умножить на
выражение для
дискретной передаточной функции необходимо умножить на ![]()
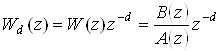 . (4.29)
. (4.29)
Приводя помехи, действующие на объект управления к выходу, можно получит структурную схему объекта управления
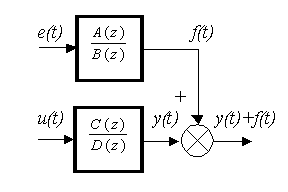
Рис. 4.3.
Для шума (по аналогии) передаточная функция будет иметь вид
 . (4.30)
. (4.30)
Объединив выражения (4.29) и (4.30), получим модель объекта с шумом измерений:
 . (4.31)
. (4.31)
В зависимости от типа модели шума, при котором гарантируется сходимость оценок модели (4.31), используются модели частного вида [30]:
– МП-модель (модель максимального правдоподобия):
 , (4.32)
, (4.32)
– НК-модель (модель наименьших квадратов):
 . (4.33)
. (4.33)
Переход от непрерывной модели к дискретной задается с помощью z –преобразования.
 . (4.34)
. (4.34)
Тогда  (4.35)
(4.35)
Сомножитель ![]() указывает на
наличие в дискретной системе экстаполятора нулевого порядка, который фиксирует
сигнал на выходе дискретного элемента между моментами квантования.
указывает на
наличие в дискретной системе экстаполятора нулевого порядка, который фиксирует
сигнал на выходе дискретного элемента между моментами квантования.
В том случае если объект управления многомерный и имеет математическую модель заданную в пространстве состояний (4.6), то последняя сводится к дискретной модели вида
 , (4.36)
, (4.36)
где параметры (матрицы) дискретной системы связаны с параметрами (матрицами) исходной непрерывной выражениями
 , (4.37)
, (4.37)
где h – интервал квантования.
Ниже показаны различные формы математических моделей и их характеристики.
Дискретная передаточная функция объекта
Непрерывная передаточная функция объекта
Дискретная передаточная функция объекта
Непрерывная передаточная функция объекта
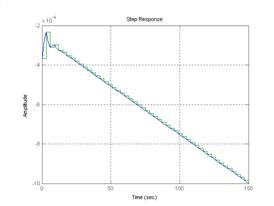
Рис. 4.5. Переходная характеристика объекта.
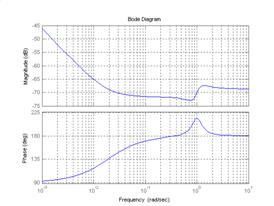
Рис. 4.6. ЛАЧХ и ФЧХ объекта.
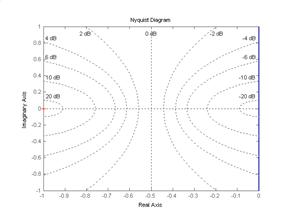
Рис. 4.7. АФЧХ объекта.
5. Выбор и описание закона регулирования
В отличии от возмущений f, являющихся неконтролируемыми, управляющие воздействия или управления u всегда известны так как вычисляются специальным устройством называемом автоматическим регулятором.
Автоматический регулятор - это программа или техническое устройство, в котором реализуется тот или иной закон управления.
Под законом управления понимается функциональная взаимосвязь между обобщенными координатами системы x, возмущениями f и управляющим воздействием u
U=F(x,f,a), (5.1)
где ![]() , в общем случае,
некоторая нелинейная функция, a
- постоянные параметры закона управления.
, в общем случае,
некоторая нелинейная функция, a
- постоянные параметры закона управления.
Автоматический регулятор подключается к объекту в соответствии со структурной схемой показанной на рис. 5.

Рис.5. Структурная схема системы автоматического управления
На структурной схеме приняты следующие обозначения. ПУ - программное (задающее устройство), АР - устройство управления (автоматический регулятор), ОО - обобщенный объект, g – задающее воздействие или задание, e – ошибка регулирования, u - управляющие координаты или величины, вырабатываемые устройством управления (АР); x - зависимые переменные (обобщенные или фазовые координаты), которые однозначно характеризуют состояние управляемого процесса в любой момент времени; y – управляемые координаты, которые в процессе управления измеряются и используются для оценки качества функционирования системы управления; f - внешние неконтролируемые переменные (возмущающие воздействия), отклоняющие y от заданных значений.
В структурной схеме (рис. 5) реализуется фундаментальный принцип управления - принцип обратной связи, когда информация с выхода объекта после соответствующей обработки в устройстве управления поступает на его вход. Причем управляющие воздействия, подаваемые на вход объекта, вычисляются таким образом, чтобы обеспечить достижения заданной цели управления и скомпенсировать неблагоприятные изменения управляемых координат y при неконтролируемом действии внешних возмущений f.
Управление - это совокупность действий, осуществляемых на основе определения информации и направляемых на поддержание или улучшение функционирования объекта в соответствии с имеющейся программой (алгоритмом) или целью управления. Автоматическое управление - управление, осуществляемое без участия человека.
Как правило, цель
управления задается в виде целевой функции или критерия качества ![]() от управляющих и
обобщенных координат объекта
от управляющих и
обобщенных координат объекта
![]() . (5.2)
. (5.2)
Ограничения на координаты объекта задаются в виде неравенств
![]() . (5.3)
. (5.3)
Если в процессе
управления для целевой функции ![]() обеспечивается экстремум, то
управление в этом случае называют оптимальным, а систему управления
оптимальной. В том случае если
обеспечивается экстремум, то
управление в этом случае называют оптимальным, а систему управления
оптимальной. В том случае если ![]() зависит от времени, или остается
постоянной, не достигая экстремума, то управления называют программным или
стабилизирующим.
зависит от времени, или остается
постоянной, не достигая экстремума, то управления называют программным или
стабилизирующим.
Если в качестве целевой
функции используют управляемые координаты y, т.е. ![]() , то имеет место автоматическое
регулирование, а не управление. Автоматическое регулирование является частным
случаем автоматического управления.
, то имеет место автоматическое
регулирование, а не управление. Автоматическое регулирование является частным
случаем автоматического управления.
Для такой обобщенной структуры
(рис.4.3) задачу управления можно сформулировать следующим образом. Для
заданной математической модели объекта найти закон управления, удовлетворяющий
заранее заданным критериям (показателям) качества, для всех ![]() и
и ![]() .
.
В теории управления нахождения закона управления называется задачей синтеза. Возможны две постановки задачи синтеза управления. Первая задача синтеза это функциональный синтез, при котором требуется найти закон управления, удовлетворяющий заданным показателям качества системы. Вторая задача синтеза это параметрический синтез, при котором для заранее заданного закона управления требуется найти его параметры, обеспечивающие заданные показатели качества.
В практике проектирования систем управления чаще решается задача параметрического синтеза для систем с линейными и нелинейными законами регулирования. Для этих целей используют следующие основные типы регуляторов.
1. Линейные регуляторы.
К ним относятся:
- пропорционально – интегрально – дифференциальные регуляторы (ПИД – регуляторы), реализующие принципа регулирования по отклонению:
- регуляторы состояния, которые еще называются линейно-квадратичными регуляторами (ЛК -регуляторами) или l – регуляторами.
- регуляторы, реализующие принцип регулирования по возмущению или регуляторы по возмущению;
- комбинированные или инвариантные регуляторы, одновременно использующие принципа регулирования по отклонению и возмущению.
2. Нелинейные или позиционные регуляторы.
К ним относятся:
- двухпозиционные регуляторы, у которых регулирующая величина принимает два фиксированных значения «включено – выключено»;
- трехпозиционные регуляторы, у которых регулирующая величина принимает три фиксированных значения «включено - выключено –реверс»;
Наиболее широко распространенным является ПИД-регулятор, реализующий закон регулирования в функции от ошибки регулирования е.
![]() , (5.4)
, (5.4)
или в операторной форме
![]() , (5.5)
, (5.5)
где Wp (p) передаточная функция регулятора равная
![]() . (5.6)
. (5.6)
Иногда используют модифицированный закон регулирования, которому соответствует следующее выражение передаточной функции
 . (5.7)
. (5.7)
Для фильтрации высокочастотных помех возникающих в цепях управления в ПИД-регулятор дополнительно включается низкочастотный фильтр. В этом случае передаточная функция регулятора будет выглядеть
![]() . (5.8)
. (5.8)
ПИД-регулятор позволяет реализовать более простые законы регулирования путем исключения той или иной составляющей из закона регулирования. Дополнительно кроме ПИД-регулятора используются П - регулятор, И - регулятор ПИ - регулятор.
Широкое распространение таких регуляторов обусловлено простой схемной или программной реализацией закона регулирования, невысокой чувствительностью параметров настройки регулятора к изменению параметров объекта (грубостью или робастностью), сравнительно простой настройкой регулятора под конкретный объект. Недостатком этих регуляторов является не очень высокое качество регулирования особенно для сложных объектов имеющих в своем составе нелинейные элементы и звенья запаздывания. Более высокое качество регулирования обеспечивают регуляторы состояния, у которых закон управления представляет собой линейную функцию от переменных состояния объекта
 (5.9)
(5.9)
В матричном виде эти уравнения запишутся
![]() . (5.10)
. (5.10)
В том случае если не все компоненты вектора состояния x доступны измерению, используют специальные устройства (наблюдатели состояния), позволяющие восстановить вектор состояния x по измеренному вектору регулируемых величин y.
Если замыкать обратную связь по регулируемым величинам то закон управления (5.9) преобразуется к виду аналогичному (5.5):
 . (5.11)
. (5.11)
где Wp(p) – матричная передаточная функция регулятора состояния отличная от передаточной функции ПИД-регулятора.
В отличие от ПИД-регулятора регулятор состояния применим для многомерных объектов и обеспечивает лучшее качество регулирования. Однако он сложен в настройке и не обладает свойством грубости (робастности).
Для объектов не требующих высокой точности регулирования можно использовать регуляторы по возмущению. Структурная схема подключения такого регулятора к объекту приведена на рис. 5.1.
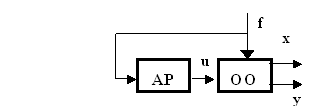
Рис. 5.1. Структурная схема системы с регулятором по возмущению.
Если известны передаточные функции объекта по правлению Wu(p) и возмущению Wf(p), то передаточная функция регулятора Wp(p) находится из условия полной компенсации возмущения.
![]() . (5.12)
. (5.12)
Откуда 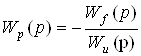 . (5.13)
. (5.13)
Недостатком регуляторов по возмущению является низкая точность регулирования, так как такой регулятор компенсирует действие на объект только контролируемых возмущений.
Достоинства обеих принципов регулирования по отклонению (ошибке) и возмущению совмещаются в комбинированных регуляторах. Рассмотрим структурную схему системы с комбинированным регулятором, компенсирующим динамическую ошибку системы, возникающую от изменения задания
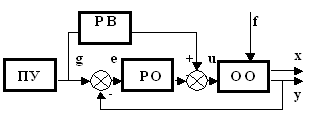
Рис. 5.2. Структурная схема системы с комбинированным регулятором.
Найдем передаточную функцию Wg(p) регулятора по возмущению РВ, обеспечивающую компенсацию задания g в системе условия. Для этого запишем передаточную функцию замкнутой системы по ошибке
![]() . (5.14)
. (5.14)
Откуда следует, что ошибка будет равна нулю, если We(p)=0, тогда
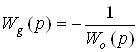 . (5.15)
. (5.15)
Позиционные регуляторы, реализующие нелинейные законы регулирования имеют статическую характеристику релейного элемента (рис. 5.3).
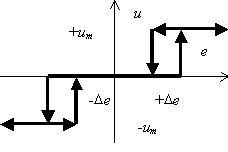
Рис. 5.3. Статическая характеристика позиционного регулятора.
Изменяя настройки позиционного регулятора можно получать различные законы регулирования:
- двухпозиционный закон регулирования, имеющий статическую характеристику идеального реле:
- двухпозиционный закон регулирования, имеющий статическую характеристику идеального реле с гистерезисом;
- трехпозиционный закон регулирования, имеющий статическую характеристику идеального реле: с зоной нечувствительности;
- трехпозиционный закон регулирования, имеющий статическую характеристику идеального реле: с зоной нечувствительности и гистерезисом;
Достоинством позиционных регуляторов является простота конструкции и настройки, высокое быстродействие. К недостаткам относятся невысокая точность регулирования и возможность возникновения в системе режима автоколебаний.
Проведем расчет настроек ПИД –регулятора для системы заданной структурной схемой рис. 5.4.
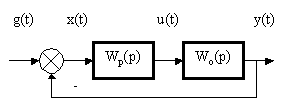
Рис. 5.4.
Передаточные функции регулятора Wp(p) и объекта Wo(p) имеют следующие выражения
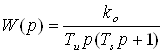
 ; (5.16)
; (5.16)
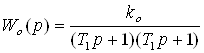 . (5.17)
. (5.17)
Если выбрать параметры настройки регулятора из условия равенства числителя передаточной функции регулятора знаменателю передаточной функции объекта
![]() , (5.18)
, (5.18)
то передаточные функции разомкнутой W(p) и замкнутой Wз(p) системы примут вид
 ; (5.19)
; (5.19)
 , (5.20)
, (5.20)
где постоянная времени
замкнутой системы  .
.
Характер переходных процессов в системе будет определяться корнями характеристического уравнения, которые в свою очередь зависят от его дискриминанта D
 (5.21)
(5.21)
Проведем настройку регулятора на границе апериодического и колебательного процесса, которая достигается при D=0. Откуда следует, что
![]() (5.22)
(5.22)
Из условия (5.18) вытекают следующие уравнения, связывающие параметры объекта и регулятора
![]() (5.23)
(5.23)
![]() (5.24)
(5.24)
Для разрешимости системы уравнений (5.22) – (5.23) дополним их условием предельно допустимого значения управления Umax при подаче на вход единичной ступенчатой функции. Значение управления на выходе регулятора найдем из условий теоремы о предельном значении передаточной функции
 (5.25)
(5.25)
Решая систему уравнений (5.22) - (5.25) найдем неизвестные параметры настройки регулятора
 (5.26)
(5.26)
Ниже приведен расчет настроек регулятора и показателей качества системы регулирования.
Параметры регулятора
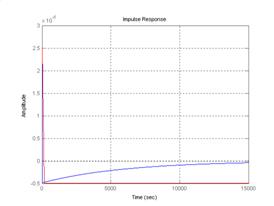
Рис. 5.5. Функция веса объекта и системы с ПИД – регулятором
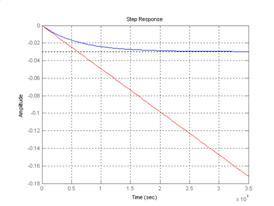
Рис. 5.6. Переходная характеристика объекта и системы с ПИД – регулятором.
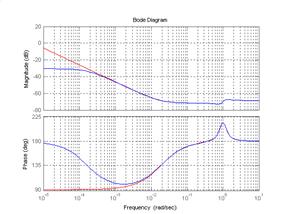
Рис. 5.7. ЛАЧХ и ФЧХ объекта и разомкнутой системы с ПИД – регулятором.
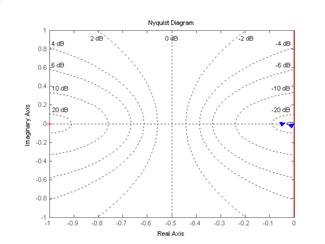
Рис. 5.8. АФЧХ объекта и системы с ПИД – регулятором.
6. Разработка структурной схемы системы
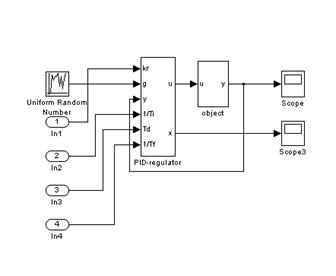
Рис. 6.1. Структурная схема системы
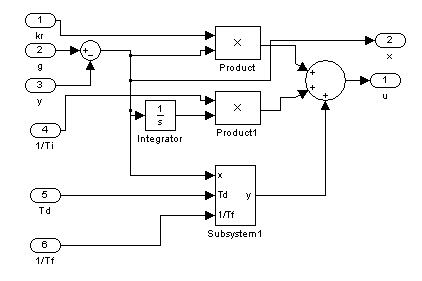
Рис. 6.2. Структурная схема ПИД - регулятора.
Заключение
Таким образом, подводя итог работе, можно отметить, что в ходе её выполнения были определены параметры регулирования системы, включающей в себя нелинейный теплоэнергетический объект (котел для подогрева воды). Были достигнуты следующие результаты:
1. По временным трендам с помощью программы Matlab проведена идентификация данного объекта.
2. Построены все необходимые графики.
3. Рассчитаны показатели качества.
Приложение
clear
% 19-20 Температура смазки dan=xlsread('opertrend');
y=dan(:,19);
u=dan(:,20);
n=length(y);
t=0:3:3*(n-1);
%Вычисление коэффициента передачи
my(1)=y(1);mu(1)=u(1);
for i=2:n
my(i)=my(i-1)+(y(i)-my(i-1))/i;
mu(i)=mu(i-1)+(u(i)-mu(i-1))/i;
ko(i)=my(i)/mu(i);
end
plot(t,ko),grid
%title ('Изменение коэффициента
передачи объекта')
xlabel ('Time, s')
ylabel ('К')
pause
yc=(y-my');
uc=u-mu';
subplot(2,1,1),grid
plot(t,u),grid
title ('Centeres input signal')
ylabel ('U')
subplot(2,1,2),grid
plot(t,y),grid
title ('Centeres output signal')
xlabel ('Time, s')
ylabel ('Y')
pause
% Анализ сигналов объекта
du=std(u)^2;
dy=std(y)^2;
ru=xcorr(uc,'biased');
ry=xcorr(yc,'biased');
ruy=xcorr(uc,yc,'biased');
tau=-n+1:1:n-1;
subplot (3,1,1)
plot(3*tau,ru),grid
title ('Correlation functions')
ylabel ('Ruu')
subplot(3,1,2)
plot(3*tau,ry),grid
ylabel ('Ryy')
subplot(3,1,3)
plot(3*tau,ruy),grid
xlabel ('Time, s')
ylabel ('Ruy')
pause
[S,f]=psd(uc,n,1/3);
subplot(2,1,1)
plot(f(1:10),S(1:10)/max(S)),grid
title ('Spectrs')
ylabel ('Suu')
[S,f]=psd(yc,n,1/3);
subplot(2,1,2)
plot(f(1:10),S(1:10)/max(S)),grid
xlabel ('Frequencies, Hz')
ylabel ('Syy')
pause
subplot(2,1,1)
hist(u,20),grid
title ('Histograms')
ylabel ('Hu')
subplot(2,1,2)
hist(y,20),grid
xlabel ('Intervals, mm')
ylabel ('Hy')
pause
subplot(1,1,1)
% RMNK
m=2;
clear Tp
P=1000*eye(2*m,2*m);
Q=zeros(2*m,1);
F=Q;
for i=1:n-m
F=[-yc(i+m-1:-1:i);uc(i+m-1:-1:i)];
ch=P*F;
zn=1+F'*P*F;
gm=ch/zn;
P=(eye(2*m)-gm*F')*P;
Q=Q+gm*(yc(m+i)-F'*Q);
kf(i,1:2*m)=Q';
Tp(i)=F'*Q;
end
% Анализ ошибки моделирования
e=yc(m+1:end)-Tp';
de=std(e);
plot(t(100:n-m),kf((100:end),:)),grid
title ('Model parametres')
xlabel ('Time, s')
ylabel ('Km')
pause
sr=[yc(m+1:end),Tp'];
plot(t(1:n-m),sr),grid
title ('Model and object outputs')
xlabel ('Time, s')
ylabel ('Y, Yм')
pause
plot (t(1:n-m),e),grid
title ('Model error')
xlabel ('Time, s')
ylabel ('Em')
pause
re=xcorr(e,'biased');
plot(3*tau,ru),grid
title ('Error correlation function')
xlabel ('Time, s')
ylabel ('Ree')
pause
[S,f]=psd(e,n,1/3);
plot(f,S/max(S)),grid
title ('Error spector')
xlabel ('Frequncy, Hz')
ylabel ('Suu')
pause
hist(e,20),grid
title ('Error histogram')
xlabel ('Interval, mm')
ylabel ('Hu')
pause
% Модели объекта
nun=[kf(end,m+1:2*m) 0];
den=[1 kf(end,1:m)];
wod=tf(nun,den,3)
[z,p,k]=zpkdata(wod,'v')
if abs(p(1)-1)<.05
p(1)=1;
end
wodf=zpk(z,p,k,3)
wo=d2c(wodf)
sm=ss(wo)
impulse(wo),grid
pause
step(wo,wodf),grid
pause
bode(wo),grid
pause
nyquist(wo),grid
pause
wonz=zpk(wo)
ym=lsim(wo,uc,t);
f=yc-ym;
%Wc=gram(sm,'c')
%Wo=gram(sm,'o')
K=lqry(sm,100000000,1)
[A,B,C,D]=ssdata(sm);
P=ss(A,[B B],C,[D D]);
Kest=kalman(P,du,0.01)
G=lqgreg(Kest,K);
clsm=feedback(sm,G,+1);
q1=tf(Kest);
q2=tf(G);
impulse(sm,'r-',clsm,'b-'),grid
pause
step(sm,'r-',clsm,'b-'),grid
pause
bode (sm,'r-',clsm,'b-'),grid
pause
nyquist(sm,'r-',clsm,'b-'),grid
save('f','f')
save('wo','wo')
Литература
1. Математическое моделирование: Методы описания и исследования сложных систем. – М.: Наука, 1989.
2. Методы классической и современной теории автоматического управления: Учебник в 3-х т. Т1: Синтез регуляторов и теория оптимизации систем автоматического управления / под ред Н.Д. Егупова. - М.: Изд-во МГТУ им Баумана, 2000. – 736 с.
3. Советов Б.Я., Яковлев С.А. Моделирование систем. – М.: Высшая школа. 1988 (Дополнительная).
4. Александров А.Г. Оптимальные и адаптивные системы. – М: Высшая школа . 1986.
5. Изерман Р. Цифровые системы управления / Пер. с англ. – М.: Мир, 1984. – 541 с.
6. Кашьян Р. Л., Рао А. Р. Построение динамических стохастических моделей по экспериментальным данным. – М: Мир, 1983. 384 с.
7. Ивахненко А. Г., Юрачковский Ю. Г. Моделирование сложных систем по экспериментальным данным. - М.: Радио и связь, 1987. - 120 с.
8. Кендал М. Временные ряды. – М.: Радио и связь, 1981. – 198 с.