
Рефераты по авиации и космонавтике
Рефераты по административному праву
Рефераты по безопасности жизнедеятельности
Рефераты по арбитражному процессу
Рефераты по архитектуре
Рефераты по астрономии
Рефераты по банковскому делу
Рефераты по сексологии
Рефераты по информатике программированию
Рефераты по биологии
Рефераты по экономике
Рефераты по москвоведению
Рефераты по экологии
Краткое содержание произведений
Рефераты по физкультуре и спорту
Топики по английскому языку
Рефераты по математике
Рефераты по музыке
Остальные рефераты
Рефераты по биржевому делу
Рефераты по ботанике и сельскому хозяйству
Рефераты по бухгалтерскому учету и аудиту
Рефераты по валютным отношениям
Рефераты по ветеринарии
Рефераты для военной кафедры
Рефераты по географии
Рефераты по геодезии
Рефераты по геологии
Рефераты по геополитике
Рефераты по государству и праву
Рефераты по гражданскому праву и процессу
Рефераты по кредитованию
Рефераты по естествознанию
Рефераты по истории техники
Рефераты по журналистике
Рефераты по зоологии
Рефераты по инвестициям
Рефераты по информатике
Исторические личности
Рефераты по кибернетике
Рефераты по коммуникации и связи
Рефераты по косметологии
Рефераты по криминалистике
Рефераты по криминологии
Рефераты по науке и технике
Рефераты по кулинарии
Рефераты по культурологии
Курсовая работа: Розробка схеми електричної принципової музичного дзвоника
Курсовая работа: Розробка схеми електричної принципової музичного дзвоника
Міністерство освіти і науки України
Роменський коледж
Київського національного економічного університету
Спеціальність: 5.091504 «Обслуговування комп’ютерних та інтелектуальних систем та мереж»
Курсовий проект з предмету: Мікропроцесорні системи
Тема: «Розробити схему електричну принципову музичного звоника»
2007
Зміст
Вступ
1 Загальний розділ
1.1 Призначення проектуємого пристрою
1.2 Технічні характеристики
1.3 Розробка і обґрунтування схеми електричної структурної
2 Спеціальний розділ
2.1 Вибір і обґрунтування елементної бази
2.2 Принцип роботи окремих ВІС з використанням часових діаграм та алгоритмів роботи
2.3 Принцип роботи пристрою згідно схеми електричної принципової
3 Експлуатаційний розділ
3.1 Ініціалізація програмуємих ВІС
3.2 Тест перевірки окремих вузлів або пристроїв
3.3 Розрахунок надійності пристрою
4 Анотація
5 Література
Вступ
В наш час, час високого рівня розвитку науки та техніки, коли людство досягло значних технологічних висот, ми все частіше і частіше стикаємося з такими термінами як мікропроцесор та мікроконтролер. В даному розділі курсової роботи я розкрию зміст цих понять та проведу коротку характеристику розвитку електроніки за останні роки.
Отже, мікропроцесор (МП) - програмно-керуючий пристрій, призначений для обробки цифрової інформації і керування процесом цієї обробки, який виконано у виді однієї (чи декількох) інтегральної схеми з високим ступенем інтеграції електронних елементів.
Мікроконтролер (МК) - керуючий пристрій, виконаний на одному чи декількох кристалах, що виконує функції логічного аналізу і керування (що дозволяє за рахунок виключення арифметичних операцій зменшити апаратурну складність пристроїв чи розвити функції логічного керування).
Архітектура МПС – розподіл функцій, що реалізуються системою на окремих її рівнях, та точне визначення меж між цими рівнями. Вона поєднує апаратні, мікропрограмні і програмні засоби обчислювальної техніки, визначає принцип організації МПС та функції її компонентів, зокрема процесора, пам’яті та ін. Архітектура МПС не відображає конструктивні особливості логічних структур і модулів та технологію їх виробництва.
Характеристики мікропроцесорів, їх продуктивність, швидкодія та надійність, а головне – багатофункціональність постійно покращуються. Один мікроконтролер може замінити набагато дорожчі та більш громіздкі електричні схеми.
Завдання даної курсової роботи – розробити схему електричну принципову малогабаритного двохпроменевого осцилографа-мультиметра. В наступних розділах роботи успішно виконано поставлене завдання та детально описано принцип роботи розробленої схеми. Схему електричну принципову розроблюваного пристрою зображено на аркуші формату А3, який додається до звіту. Дану тему я обрав для курсової роботи не випадково: осцилограф – один з найдорожчих пристроїв, які часто використовую радіоконструктори. Цікавою особливістю розроблюваного пристрою є використання рідкокристалічних графічних індикаторів для виведення результату вимірювань
1. Загальний розділ
1.1 Призначення проектуємого пристрою
Визначення та визначення термінів, що використовуються в курсовій роботі.
АЦП – аналого-цифровий перетворювач
ВІС – великі інтегральні схеми
ЕОМ – електронно-обчислювальна машина
МК – мікроконтролер
МП – мікропроцесор
МІК – модуль інтерфейсу користувача
МПК – мікропроцесорний комплект
МПС – мікропроцесорна система
ОЗП – оперативно-запам’ятовучий пристрій
ОМК – однокристальний мікроконтролер
ЦП – центральний процесор
Місце та основні характеристики пристрою в архітектурі МПС:
Завданням курсової роботи є розробка схеми електричної принципової малогабаритного двохпроменевого осцилографу-мультиметру. Оскільки осцилограф та мультиметр – одні з найважливіших вимірювальних приладів, а ціна їх досить висока, то актуально розробити просту схему осцилографу, який доволі легко сконструювати самостійно.
В процесі виконання завдання було схему було створено з використанням мікроконтролерів та аналого-цифрового перетворювача.
Однокристальний мікроконтролер (ОМК) це пристрій, виконаний конструктивно в одному корпусі ВІС, який містить усі компоненти МПС: процесор, пам'ять даних, пам'ять програм, програмовні інтерфейси.
Для ОМК характерні наступні особливості:
- система команд, орієнтована на виконання завдань керування і регулювання;
- алгоритми, що реалізуються на ОМК, мають багато розгалужень залежно від зовнішніх сигналів;
- дані, якими оперують ОМК, не повинні мати велику розрядність;
- схемна реалізація систем керування на базі ОМК нескладна і має невисоку вартість;
- універсальність і можливість розширення функцій керування значно нижчі, ніж у системах із однокристальними МП.
Однокристальні мікроконтролери зручно використовувати при розробці вбудованих пристроїв керування різноманітним обладнанням, наприклад побутовою технікою, мобільними телефонами, та іншими електронними пристроями.
Проектування нового пристрою прийнято починати з опису його архітектури, що представляє собою модель пристрою із погляду програміста. Модель у процесі проектування перетворюється в структуру пристрою, що визначає склад, призначення і взаємні зв'язки необхідних апаратурних компонентів, що реалізують бажану архітектуру.
АЦП – пристрої, які використовують для перетворення аналогового сигналу в цифровий.
Варто зазначити, що в основу побудови МПС покладено три основні принципи: магістральності, модульності і мікропограмного керування.
Принцип магістральності визначає характер зв’язків між функціональними блоками МПС – усі блоки з’єднуються з єдиною системною шиною.
Принцип модульності полягає в тому, що система зазується
1.2 Технічні характеристики
При розробці принципової схеми проектуємого пристрою ми використовували 8-ми бітовий мікроконтролер AT90S8515-8PI фірми Atmel з 8 кілобайтами програмованої пам’яті. Розглянемо його технічні особливості:
Блокування бітів при високій напрузі живлення. В деяких пристроях блоковані біти на перезаписуються при високій напрузі живлення і температурі. В даній ситуації неможливо перепрограмувати пристрій коли заблоковані біти вже встановлені. Дана помилка може виникнути в випадку, коли температура оточуючого середовища занадто висока. Для вирішення проблеми потрібно зменшити напругу живлення до 4 В, перед виконанням стирання. Після цього контролер розблокується, і ми отримаємо можливість перепрограмувати пристрій (практично при будь-якій температурі навколишнього середовища).
В випадку, якщо відбулася команда скидання під час запису пам’яті контролера результат запису буде не такий, який ми очікуємо. Цикл запису пам’яті ніби завершується так, як і повинен, але регістри адреси будуть встановлені в положення 0. Результатом може стати хибне відображення записаного значення. Для усунення проблеми в випадку, коли ми не можемо гарантувати захист від отримання сигналу скидання під час запису пам’яті ми не повинні використовувати адресу 0 для пам’яті.
В випадку, коли живлення МК під час програмування нижче 3 В, послідовне програмування може завершитися невдачею. Отже, для коректного програмування пристрою потрібно тримати живлення не нижче рівня 3 В під час програмування контролера.
Джерело живлення використане в схемі повинне бути стабілізованим джерелом з вихідною напругою 5 В.
Детальні характеристики мікроконтролера AT90S8515-8PI подано далі.
Технічні характеристики МК AT90S8515-8PI:
Напруга живлення, В 4,0-6,0
Тактова частота, МГц 8
Кількість ліній введення-виведення 32
Ємність ненргонезалежної пам’яті програм, К 8
Ємність енергонезалежної пам’яті даних, К 512
Ємність статичної пам’яті даних, байт 512
Інтерфейси UART, SPI
Аналогові входи відсутні
Кількість і розрядність таймерів 2х8
Кількість і розрядність лічильників 1х16
Можливість програмування на цільовій платі при основній напрузі живлення наявна
1.3 Розробка і обґрунтування схеми електричної структурної
Схему електричну структурну приведено на рисунку 1.3.1.
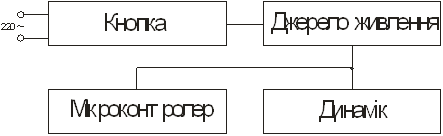
Рисунок 1.3.1 – Структурна схема проектуємого пристрою
На структурній схемі зображено наступні елементи: кнопка, джерело живлення, мікроконтролер та динамік.
Розподіл функцій між елементами можна умовно розділити таким чином: кнопка служить для увімкнення приладу (наслідком чого є програвання наступної музичної композиції), джерело живлення подає робочу напругу для роботи пристою, живлячи кожен з його вузлів, мікроконтролер – головна керуюча частина пристрою, динамік забезпечує програвання музичних композицій.
2 Спеціальний розділ
2.1 Вибір і обґрунтування елементної бази
При проектуванні пристрою використані наступні елементи:
Мікроконтролер AT 90S8515фірми Atmel, 2 транзистори типу КТ5503Е та 1 типу КТ819Г, джерелом живлення може бути будь-яке стабілізоване джерело (можна використати батарею з гальванічних елементів або акумуляторів) з вихідною напругою 5 В. Передбачено використання реле типу Еestar BT-5S, але можна використовувати будь-яке інше реле з напругою спрацювання не більше ніж 4,5 В з контактами, розрахованими на комутацію мереженої напруги 220 В. Для контролю величини напруги доцільно використати детектор зниження напруги живлення КР1171СП47 або його аналог PST 529.
Мікроконтролер AT 90S8515являє собою 8-розряядний високопродуктивний RISC-контролер загального призначення. Архітектуру мікроконтролера AT 90S8515зображено на рисунку 2.1.1.
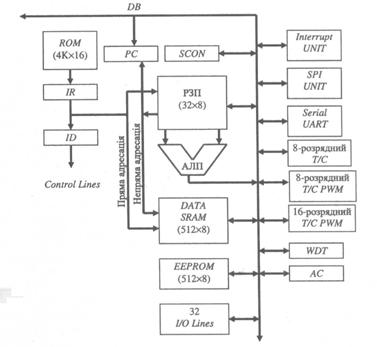
Рисунок 2.1.1 – Архітектура мікроконтролера AT 90S8515
В курсовій роботі обрано контролер з сімейства Classic, яке характеризується продуктивністю до 16 мільйонів операцій в секунду, наявністю пам’яті програм Flash ROM 2-8 кбайт, пам’яті даних EEPROM 64-512 байт, пам’яті даних SRAM 128-512 байт. Контролери даної сім’ї мають дещо нижчі можливості ніж інші сім’ї з точки зору периферії і обчислювальних можливостей.
Широка номенклатура AVR-мікроконтролерів дозволила обрати такий, який задовольнив всі наші потреби (див пункт 1.2 Технічні характеристики).
Високу продуктивність забезпечують:
- виконанням великої кількості команд за один тактовий цикл;
- конвеєром команд, що забезпечують одночасно з виконанням поточної команди вибірку наступної;
- потужною системою команд єдиного 16-розрядного формату;
- вбудованими апаратними пристроями.
Мале енергоспоживання забезпечують:
- СМОS-технологія;
- цілком статична роботою - від покрокового режиму до максимальної тактової частоти.
Малу вартість як на рівні вартості апаратного обладнання, так і на рівні вартості розробки і налагодження прикладних програм, забезпечують:
- Flash-пам'яттю програм, яку програмують на цільовій платі;
- можливістю вибору мікроконтролера з достатньою і відповідною кількістю функцій і вбудованої периферії.
2.2 Принцип роботи окремих ВІС з використанням часових діаграм та алгоритмів роботи
- Конвеєрна вибірка команд мікроконтролером і виконання команд
- Вхідний тактовий сигнал (вхід OSC1) внутрішньою схемою мікро контролера ділиться на чотири неперекриваючихся такти Q1, Q2, Q3, Q4. Внутрішній лічильник команд збільшується на одиницю при кожному такті Q1, а вибірка команд із пам’яті програм на кожному такті Q4. Декодування і виконання команди виконується з такту Q1 до Q4. Цей процес показаний на рисунку 2.2.1.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
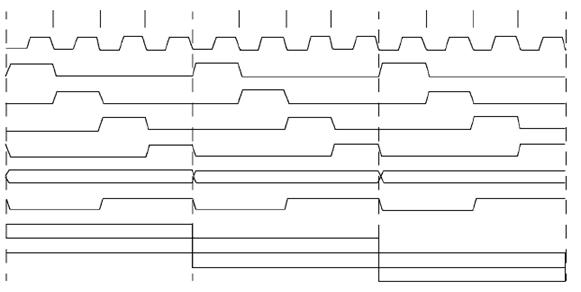
Рисунок 2.2.1 - Діаграма циклів виконання команд
Цикл виконання команди складається із чотирьох тактів Q1, Q2, Q3 і Q4. Вибірка наступної команди і виконання поточної зміщені по часу таким чином виконання команди виконується за один цикл. Якщо команда змінює лічильник команд PC (наприклад команда GOTO) то необхідно два машинних цикла для виконання команди.
Цикл вибірки команди починається із збільшення лічильника команд PC в такті Q1. В циклі виконання команди, код завантаженої команди, поміщається в регістр команд IR на такті Q1. Декодування і виконання команди виконується в тактах Q1, Q2 і Q4. Операнд із пам’яті даних читається в такті Q2, а результат виконання команди записується в такті Q4.
2.3 Принцип роботи пристрою згідно схеми електричної принципової
Принципова схема пристрою зображена на рисунку 2.3.1.
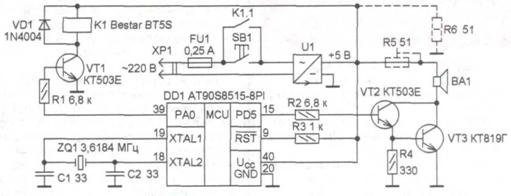
Рисунок 2.3.1 – Схема електрична принципова
При натисненні на кнопку дзвоника SB1 вмикається живлення пристрою, починає роботу програма, що записана в пам’ять мікроконтролера, на виводі 39 (PA0) з’являється напруга логічної 1. Результатом цього є відкриття транзистора VT1, спрацьовує реле К1, і К1.1 блокує кнопку звоника.
Для формування коливань використовується таймер мікроконтролера і режим його роботи на переключення зовнішнього виводу PD5 (для отримання потрібної звукової частоти частоту роботи таймера потрібно збільшити у 2 рази). Сигнал, що знімають з цього виводу підсилюється транзистором VT2VT3, в колекторну мережу якого підключено динамічну головку ВА1. Для регулювання гучності послідовно з нею модна підключити змінний резистор R5, після програвання мелодії програма записує в енергонезалежну пам’ять мікроконтролера вказівник на наступну мелодію. Високий рівень напруги на виході 39 зміняється на низький і реле розриває коло живлення до наступного натиснення на кнопку SB1.
3 Експлуатаційний розділ
3.1 Ініціалізація програмованих ВІС
Програма ініціалізації мікросхем виконує налагодження портів вводу-виводу мікросхем та встановлює параметри дільника та входів мікросхеми по яким буде виконуватися переривання. Також налагоджуються переривання по таймеру. Всі інші переривання забороняються.
Програма ініціалізації і програма тестування пристрою наведена в пункті 3.2.
3.2 Тест перевірки окремих вузлів або пристроїв
Програма за якою працює мікропроцесор мовою асемблера АТ90S8515 має наступний вигляд:
bigpause equ 100 ; задаемо значення стартової паузи
pause1 egu 15 ; значення паузи перед зміною напрямку руху
pause2 equ 50 ; задаємо час, на протязі якого планетохід буде відїжджати назад
pause2 equ 50 ; задаємо час, на протязі якого планетохід буде розвертатися
portA equ 05h ; адрес порта А
portB equ 06h ; адрес порта В
org 0h ; резервування 100 байт починаючи з адресу 0h
reset:
mov r31, 1Fh ; задаємо направлення роботи портів
out portB, r31 ; PB0, PB1, PB2, PB3, PB4 - виходи, PB5, PB6 - входи
mov r31, 61h ; виводимо в порт В код зупинки двигунів,
out portB, r31 ; і вмикаємо резистори на входах РВ5, РВ6
mov r31, bigpause ; записуэмо в регістр r31 значення великої паузи
call pause ; викликаємо підпрограму паузи
jmp start ; переходимо на мітку старт
start:
mov r31, 00000011b ; установлюємо на виході РВ1 лог. 1,
out portB, r31 ; що зумовлює ввімкнення лівого двигуна
mov r31, 00001011b ; установлюємо на виході РВ3 лог. 1,
out portB, r31 ; що зумовлює ввімкнення правого двигуна
mov r31, 00001010b ; установлюэмо на виходіРВ0 лог. 0,
out portb, r31 ; що і гасить світлодіод
scan:
in r31, portB ; читаємо стан порту В
test r31, 01000000b ; перевіряємо чи натиснута права кнопка
jz left ; якщо натиснута, переходимо на мітку left
test r31, 00100000b ; перевіряємо чи натиснута ліва кнопка
jz right ; якщо натиснута, переходимо на мітку right
jmp scan ; якщо ні одна кнопка не натиснена, повторяємо цикл перевірки стану кнопок
left:
mov r30, 63h ; записуємо в регістр r30 код повороту наліво, який буде виводиться в порт в
call stop ; визиваємо підпрограму stop
jmp start ; повертаємся на мітку start
right:
mov r30, 69h ; записуємо в регістр r30 код повороту направо, який буде виводиться в порт в
call stop ; визиваємо підпрограму stop
jmp start ; повертаємся на мітку start
; --------------------------------------------------------------------------------------------------
; підпрограма stop, задача якої - ввімкнення потрібного маневру (відїзд, повороти направо та наліво)
; --------------------------------------------------------------------------------------------------
stop proc
mov r31, 00001000b ; установлюємо на виході РВ1 лог. 0,
out portB, r31 ; що зумовлює вимкнення лівого двигуна
mov r31, 00000000b ; установлюємо на виході РВ3 лог. 0,
out portB, r31 ; що зумовлює вимкнення правого двигуна
mov r31, pause1 ; записати в регістр r31 значення паузи перед зміною направлення руху
call pause ; викликаємо підпрограму pause
mov r31, 00000100b ; встановлюємо на виході РВ2 лог. 1,
out portB, r31 ; що заставляє лівий двигун крутитися в іншу сторону
mov r31, 00010100b встановлюэмо на виході РВ4 лог. 1,
out portB, r31 ; що заставляє правий двигун крутитися в іншу сторону
mov r31, 00010101b ; встановлюэмо на виході РВ0 лог. 1,
out portB, r31 ; що запалює світлодіод
mov r31, pause2 ; записати врегістр r31 значення часу, на протязі якого планетохід буде відїжджати назад
call pause ; викликаємо підпрограму pause
mov r31, 00010101b ; встановлюємо на виході РВ2 лог. 0,
out portB, r31 ; що вимикає лівий двигун
mov r31, 00010001b встановлюэмо на виході РВ4 лог. 0,
out portB, r31 ; що вимикає правий двигун
mov r31, 00000000b встановлюэмо на виході РВ0 лог. 0,
out portB, r31 ; чим гасим світлодіод
mov r31, pause1 ; записати врегістр r31 значення часу, перед зміною напрямку руху
call pause ; викликаємо підпрограму pause
out portB, r30 ; виводим в порт В код повороту наліво чи направо
mov r31, pause3 ; записати врегістр r31 значення часу, на протязі якого планетохід буде виконувати поворот
call pause ; викликаємо підпрограму pause
out portB, r30 ; записуэмо в порт В код відповідаючий повороту направо чи наліво
mov r31, pause3 ; записати врегістр r31 значення часу, на протязі якого планетохід буде виконувати поворот
call pause ; викликаємо підпрограму pause
mov r31, 61h ; записуэмо в регістр r31 код, відповідний відключенню двигунів
out portB, r31 ; та виводимо його на порт В
mov r31, pause1 ; записати врегістр r31 значення часу, перед зміною напрямку руху
call pause ; викликаємо підпрограму pause
stop endp ; вихід із підпрограми
; ----------------------------------------------------------------
; підпрограма витримки пауз, інтервал яких задається регістром r31
; ----------------------------------------------------------------
pause proc
d3:
mov r29, FFh ; встановлюэмо регістр r29 в FFh
d2:
mov r28, FFh ; встановлюэмо регістр r28 в FFh
d1:
sub r28, 1 ; віднімаємо від регістру r28 оденицю
test r28, 2
jz d1
sub r29, 1 ; віднімаємо від регістру r29 оденицю
test r29, 3
jz d2
sub r31, 1 ; віднімаємо від регістру r31 оденицю
test r31, 4
jz d3
pause endp ; вихід із підпрограми
end ; завершення програми
Алгоритм роботи пристрою, користуючись яким доволі просто розібратися з основними принципами покладеними в основу роботи програми зображено на рисунку 3.2.1.
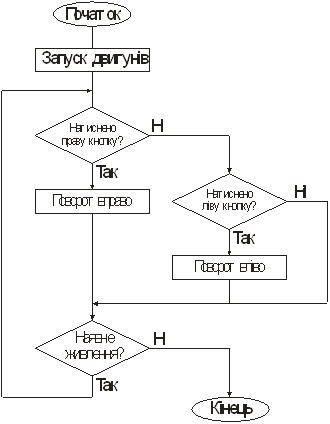
Рисунок 3.2.1 – Алгоритм роботи пристрою
3.3 Розрахунок надійності пристрою
Надійність – властивість пристрою виконувати задані функції в заданих режимах і умовах застосування, обслуговування, ремонту, збереження, транспортування на протязі необхідного інтервалу часу.
Показники надійності:
1. Безвідмовність.
2. Довговічність.
3. Ремонтопридатність.
4. Збереження.
Безвідмовність – властивість безупинно зберігати працездатність до граничного стану, після настання, якого подальша експлуатація виробу економічно недоцільна.
Ремонтопридатність – пристосованість пристрою до попередження відмовлень, до можливості виявлення та усунення несправностей шляхом проведення ремонту і технічного обслуговування.
До термінів ремонтопридатності відносяться: відмовлення, збереження.
Відмовлення – подія, що полягає в повній або частковій утраті працездатності пристрою.
Відмовлення бувають:
Раптові (катастрофічні) – стрибкоподібна зміна параметрів робочого виробу.
Поступові (параметричні) – постійна зміна одного або декількох параметрів з часом, що виходять за припустимі межі.
Збереження – термін, протягом якого при дотриманні режимів збереження виріб зберігає працездатний стан.
Розрахунок надійності поділяється на три розділи:
1. Визначення значення інтенсивності відмовлення всіх елементів за принциповою схемою вузла пристрою.
2. Визначення значення імовірності безвідмовної роботи всієї схеми.
3. Визначення середнього наробітку до першого відмовлення.
4. Виконання розрахунків проходить наступним чином:
5. 1. Інтенсивність відмовлення всіх елементів визначається за формулою:
6. ![]() (3.3.1)
(3.3.1)
7. де:
8. ni – кількість елементів у схемі;
9. li – інтенсивність відмовлень і-го елемента;
10. m – кількість типів елементів.
11. При розрахунку також потрібно враховувати інтенсивність відмовлень через пайки радіоелементів на друкованій платі.
12. Інтенсивність відмовлень елементів розраховуємо за формулою:
13.
![]() (3.3.2)
(3.3.2)
14. де:
15. lо – інтенсивність відмовлень елементів у режимі номінального навантаження;
16. Кe – експлуатаційний коефіцієнт;
17. Кр – коефіцієнт навантаження.
18. Усі ці параметри беруться з довідника з розрахунку надійності.
19. 2. Ймовірністю безвідмовної роботи називається ймовірність того, що за певних умов експлуатації в заданому інтервалі часу не відбудеться жодного відмовлення.
20. Ймовірність безвідмовної роботи визначається за формулою:
21.
![]() (3.3.3)
(3.3.3)
22. де:
23.
![]() - інтенсивність відмов всіх елементів;
- інтенсивність відмов всіх елементів;
24. t – час, (год).
25. За результатами розрахунків складається таблиця і графік.
26. 3. Середній наробіток до першого відмовлення – це час роботи пристрою до першої відмови.
27. Середній наробіток на відмовлення визначається за формулою:
28.
![]() (3.3.4)
(3.3.4)
29. Розрахунок надійності пристрою приведено далі.
Анотація
Завдання курсового проекту: «Розробити схему електричну принципову електричного дзвоника». При виконанні даної роботи, було розроблено електричну та структурну схему проектуємого пристрою, розраховано його надійність, складено програму ініціалізації та тестування пристрою, а також детально вивчено принципи його роботи. Всі матеріали, використані при виконанні поставленого завдання представлені у відповідних розділах даної курсової роботи.
Література
1. Якименко Ю.І. Терещенко Т.О. Сокол Є.І. «Мікропроцесорна техніка» // К.: Кондор – 2004 – 24 с.
2. Методичні вказівки щодо виконання курсової роботи.
3. Аналоговые и цифровые интегральные микросхемы / Под ред. С. В. Якубовского. - М. Радио и связь, 1984.
4. Самофалов К. Г., Викторов О. В., Кузняк А. К. Микропроцессоры/ К. - К.:Техника, 1986
5. Вершинин О.Е. «Применение микропроцессоров для автоматизации технологических процессов» // Л.: Энергоатомиздат, 1986.
6. ЕСКД ГОСТ 2.708-81 "Правила выполнения электрических схем цифровой вычислительной техники".