
Рефераты по авиации и космонавтике
Рефераты по административному праву
Рефераты по безопасности жизнедеятельности
Рефераты по арбитражному процессу
Рефераты по архитектуре
Рефераты по астрономии
Рефераты по банковскому делу
Рефераты по сексологии
Рефераты по информатике программированию
Рефераты по биологии
Рефераты по экономике
Рефераты по москвоведению
Рефераты по экологии
Краткое содержание произведений
Рефераты по физкультуре и спорту
Топики по английскому языку
Рефераты по математике
Рефераты по музыке
Остальные рефераты
Рефераты по биржевому делу
Рефераты по ботанике и сельскому хозяйству
Рефераты по бухгалтерскому учету и аудиту
Рефераты по валютным отношениям
Рефераты по ветеринарии
Рефераты для военной кафедры
Рефераты по географии
Рефераты по геодезии
Рефераты по геологии
Рефераты по геополитике
Рефераты по государству и праву
Рефераты по гражданскому праву и процессу
Рефераты по кредитованию
Рефераты по естествознанию
Рефераты по истории техники
Рефераты по журналистике
Рефераты по зоологии
Рефераты по инвестициям
Рефераты по информатике
Исторические личности
Рефераты по кибернетике
Рефераты по коммуникации и связи
Рефераты по косметологии
Рефераты по криминалистике
Рефераты по криминологии
Рефераты по науке и технике
Рефераты по кулинарии
Рефераты по культурологии
Дипломная работа: Однокритериальный измеритель частотной избирательности радиоприёмника
Дипломная работа: Однокритериальный измеритель частотной избирательности радиоприёмника
Министерство образования Республики Беларусь
Белорусский Государственный Университет
Информатики и Радиоэлектроники
Кафедра: радиотехнических систем
Факультет: радиотехники и электроники
К защите допускаю
Заведующий кафедрой РТС
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к дипломному проекту
На тему: Однокритериальный измеритель частотной избирательности радиоприёмника
Дипломник:
Руководитель:
Консультанты:
по охране труда и экологии
по экономике
Рецензент:
г. МИНСК 2004
Введение
Электромагнитные излучения воспринимаются практически всеми объектами, однако интерес могут представлять только те воздействия, которые ведут к каким-либо последствиям. Влияние помех на РТС происходит в основном через РПрУ. От уровня такого влияния зависит качество работы радиотехнической системы. РПрУ предназначено для улавливания энергии электромагнитных волн, выделения полезного радиосигнала и преобразования его в сообщение. Такое назначение обеспечивается работой трех устройств: антенны, радиоприемника и оконечного устройства.
РТС РПрУ обладает свойствами, влияющими на тактико-технические характеристики системы. Так, избирательность РПрУ отражается на ЭМС, помехоустойчивости и помехозащищенности РТС, а следовательно, на дальности действия, точности измерения координат, пропускной способности и т. д.
Большое значение имеют также такие характеристики, как чувствительность, диапазон рабочих частот, надежность, адаптивность и другие показатели РПрУ. Особое место среди характеристик РПрУ занимает динамический диапазон.
С другой стороны, РПрУ как часть РТС, следуя системному подходу, должно не только влиять на характеристики РТС, но и удовлетворять определенным требованиям. Поэтому при изучении вопросов ЭМС следует иметь в виду не только возможности анализа, но и синтеза РПрУ с заданными характеристиками.
Важнейшей характеристикой РПрУ с точки зрения теории ЭМС является его избирательность. Под избирательностью понимаем способность РПрУ выделять (осуществлять селекцию) полезный сигнал из сложных электромагнитных полей, созданных в точке расположения РПрУ. Для обеспечения избирательности используют отличия полезного сигнала от помех в основном по следующим параметрам: несущей частоте, направлению прихода волны, поляризации, времени прихода сигналов и т. д. Наиболее глубоко в настоящее время изучена частотная избирательность радиоприемников.
Кривая избирательности, отображающая зависимость снятого по мощности нормированного коэффициента передачи от частоты k(f), достаточно полно характеризует частотную избирательность в линейном режиме. Однако при изучении ЭМС предполагается, что на входе приёмника динамический диапазон сигналов может превзойти динамический диапазон приёмника. Возможны нелинейные преобразования входных сигналов с образованием помех, проникающих на выход приёмника при условии, что частоты входных сигналов не совпадают ни с основным, ни с побочными каналами.
Выявление таких помех возможно только при подаче на вход приёмника двух и более испытательных сигналов. Так, возникла необходимость в оценке двухсигнальной и многосигнальной избирательности.
Из характеристик избирательности цепей и устройств рассмотрим характеристику, представляющую собой нормированную зависимость коэффициента передачи k(x) цепи (устройства) по мощности от значения параметра х при номинальных данных на выходе.
Существование порогового
эффекта и его схемная реализация, выполненная в большинстве РПрУ, позволяет
допускать, что принимаются только сигналы на уровне порога или выше его. Это
утверждение является составной частью модели ЭМО и РПрУ. Всё, что ниже порога,
механически не отбрасывается, а участвует в создании некоторого конечного
уровня помех ![]() , непосредственно влияющего на
выбор порога
, непосредственно влияющего на
выбор порога ![]() .
.
В радиоприёмнике различают линейную и нелинейную части. К линейной части относят все цепи до входа детектора. При этом линейность тракта оценивается по его реакции на полезный сигнал, если амплитуда последнего не слишком велика. Детектор и последующие цепи, меняют свои параметры в зависимости от уровня напряжения сигнала. Поэтому их относят к нелинейной части приёмника.
Однако так называемая линейная часть приемника при очень больших уровнях полезного или мешающего сигналов может работать в нелинейном режиме, при котором параметры цепей изменяются в зависимости от интенсивности сигнала. Возникает ряд нежелательных эффектов, ухудшающих работу РПрУ. В частности, одним из них является интермодуляция, или взаимная модуляция.
Под интермодуляцией в радиоприемнике следует понимать возникновение помех на выходе радиоприемника при действии на его входе двух и более сигналов, частоты которых не совпадают с частотами основного и побочных каналов приема радиоприемника [4].
Интермодуляция в более узком смысле сводится к образованию в результате нелинейных преобразований новых частотных составляющих, отсутствующих в спектре исходных колебаний. При этом вновь образованные колебания могут оказывать мешающее действие, если их частоты совпадают с основным или побочными каналами приема. Если считать непреднамеренные помехи сосредоточенными по спектру, то на выходе нелинейного элемента образуются колебания с частотами
![]() ,
,
где ![]() — целые положительные и
отрицательные числа.
— целые положительные и
отрицательные числа.
Число
![]()
называют порядком интермодуляции. Отметим, что число взаимодействующих сигналов, особенно число каналов, через которые проникает помеха, настолько велики, что детальное теоретическое изучение всего многообразия частотных комбинаций затруднительно. Поэтому на первый план выходят методы экспериментальных оценок влияния интермодуляции.
При теоретическом изучении
интермодуляции накладывают ряд ограничений, которые сводятся к следующему.
Амплитуды составляющих с ростом порядка интермодуляции быстро падают. В связи с
этим интермодуляции могут быть третьего или четвертого порядка (редко
седьмого). На сложность процессов особенно значительно влияние числа
взаимодействующих сигналов, поэтому и в теории и в эксперименте ограничиваются
двумя сигналами с частотами ![]() и
и ![]() . При этом можно решить
большинство вопросов, определяющих закономерности образования продуктов
интермодуляции и наметить достаточно эффективные меры по борьбе с помехами
такого типа, полагая, что они должны способствовать уменьшению уровня помех от
интермодуляции, возникающей за счет трех и более сигналов.
. При этом можно решить
большинство вопросов, определяющих закономерности образования продуктов
интермодуляции и наметить достаточно эффективные меры по борьбе с помехами
такого типа, полагая, что они должны способствовать уменьшению уровня помех от
интермодуляции, возникающей за счет трех и более сигналов.
С такими оговорками для частот помех интермодуляции можно записать следующие равенства:
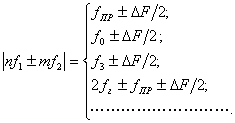 (2.1)
(2.1)
Продукты интермодуляции возникают в основном в активных элементах усилителя высокой частоты и преобразователя частоты. В усилителе высокой частоты при наличии хорошей избирательности по высокой частоте наиболее благоприятные условия создаются для частот вида
![]()
и, в частности, для частот
![]()
и
![]()
поскольку в этом случае
частоты ![]() и
и
![]() могут
иметь значения, близкие к частоте
могут
иметь значения, близкие к частоте ![]() полезного сигнала.
полезного сигнала.
Все другие комбинации частоты также эффективны, если они после преобразователя частоты непосредственно проникают в тракт основной селекции по частоте, т. е. в тракт усиления промежуточной частоты.
Особое место занимает вид интермодуляции, при которой образуются помехи за счет взаимодействия сосредоточенного по частоте мешающего сигнала и шума. Если считать, что шум имеет сплошной спектр, то при наличии сосредоточенной помехи всегда можно найти такие участки спектра, которые с этой помехой образуют продукты интермодуляции, совпадающие с основным или побочными каналами приемника. В конечном итоге увеличивается уровень шума и снижается чувствительность приемника.
Блокированием в радиоприемнике [3] называется изменение уровня сигнала или отношения сигнал/шум на выходе радиоприемника при действии радиопомехи, частота которой не совпадает с частотами основного и побочного каналов приема. Основная причина такого изменения—уменьшение усиления линейной части радиоприемника под действием мешающего сигнала. Это уменьшение происходит в усилителе высокой частоты или преобразователе. Поэтому ухудшается чувствительность приемника в целом. Блокирование возникает в результате помехи, которая не может сама пройти через приемник (как и при интермодуляции). Поэтому образование таких помех возможно для сигналов с большой интенсивностью, вероятность появления которых может быть невысокой.
Третьим (после интермодуляции и блокирования) распространенным видом помех, связанных с нелинейными явлениями, стали перекрестные искажения. Перекрестными искажениями в радиоприемнике [4] называются изменения структуры спектра сигнала на выходе радиоприёмника при действии сигнала и модулированной радиопомехи, частота которой не совпадает с частотами основного и побочного каналов приема радиоприёмника.
Перекрестные искажения
являются результатом действия сильной помехи на коэффициент усиления усилителя
высокой частоты или преобразователя частоты в соответствии с модуляцией этой сильной
помехи. Меняется и полезный сигнал: происходит «перенос» модуляции с помехи на
полезный сигнал. Глубина модуляции может быть достаточно большой, что
затрудняет прием полезного сигнала. Перекрестные искажения появляются также при
фазовой и частотной модуляциях. Поэтому различают амплитудную и угловую
перекрестные модуляции. Амплитуды мешающих сигналов ограничены сверху уровнем ![]() , при котором
отрицательные последствия нелинейных явлений еще допустимы. Соответственно
можно говорить о допустимой мощности
, при котором
отрицательные последствия нелинейных явлений еще допустимы. Соответственно
можно говорить о допустимой мощности ![]() , ограничивающей мощность
непреднамеренных помех сверху.
, ограничивающей мощность
непреднамеренных помех сверху.
Минимальные уровни
сигналов на входе приемника определяются пороговым эффектом и соответственно
равны ![]() или
или
![]() . Таким
образом, нелинейные явления ограничивают диапазон сигналов сверху, а шумы
приемника — снизу. Отношение верхнего значения напряжения
. Таким
образом, нелинейные явления ограничивают диапазон сигналов сверху, а шумы
приемника — снизу. Отношение верхнего значения напряжения ![]() к пороговому уровню
к пороговому уровню ![]() называют
динамическим диапазоном радиоприемника.
называют
динамическим диапазоном радиоприемника.
Динамический диапазон радиоприёмника характеризует, таким образом, линейность его входа от антенны до усилителя промежуточной частоты. Однако понятие «динамический диапазон» имеет и другой смысл. Поэтому различают динамические диапазоны по основному и соседнему каналам.
Динамический диапазон по основному каналу измеряется на выходе УПЧ, характеризует ту часть приёмника, которую принято называть линейной, и зависит от нелинейности последних каскадов УПЧ. В отдельных случаях он может определяться на выходе видеоусилителя или усилителя низкой частоты. Возможно существенное расширение динамического диапазона приемника по основному каналу за счет применения автоматической регулировки усиления или логарифмического УПЧ.
Динамический диапазон по соседнему каналу характеризует линейность тракта от входа РПрУ до входа УПЧ. Этот диапазон может сопоставляться с динамическим диапазоном входных сигналов. Верхняя граница диапазона определяется наименьшим значением интенсивности входных сигналов, при котором заметное влияние оказывают интермодуляции, блокирование или перекрестные искажения.
Известны методы измерения двухсигнальной избирательности, основанные на использовании двух генераторов стандартных сигналов, отличающиеся относительно малой информативностью и производительностью.
Существует метод, не
имеющий таких недостатков и обеспечивающий двухсигнальное зондирование
приёмника с панорамной индикацией. Функциональная схема прибора показана на
рис.1 Генераторы сигналов ГС1 и ГС2 под действием пилообразных напряжений
генераторов развертки ГР1 и ГР2 меняют частоты ![]() и
и ![]() соответственно по пилообразному
закону. Периоды пилообразных напряжений
соответственно по пилообразному
закону. Периоды пилообразных напряжений ![]() и
и ![]() и соответствующие им периоды
изменения частот сигналов существенно отличаются друг от друга. В нашем случае
и соответствующие им периоды
изменения частот сигналов существенно отличаются друг от друга. В нашем случае ![]() .
.
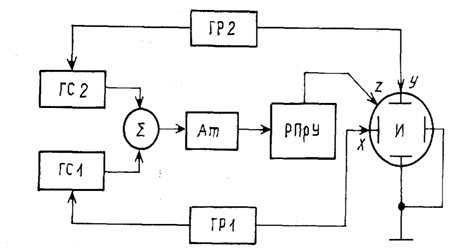
Рис.1 Функциональная схема прибора с панорамной индикацией
Частотно-временные
диаграммы перестройки ГС1 и ГС2 показаны на рис.2 Приёмник должен реагировать
на сигналы, если их частоты совпадут с частотой настройки основного канала ![]() или с
частотами канала промежуточной частоты
или с
частотами канала промежуточной частоты ![]() , зеркального
, зеркального ![]() и других побочных
каналов и если уровень сигналов на входе приёмника будет достаточным. Этот
уровень можно регулировать с помощью аттенюатора (Ат), включенного между
сумматором
и других побочных
каналов и если уровень сигналов на входе приёмника будет достаточным. Этот
уровень можно регулировать с помощью аттенюатора (Ат), включенного между
сумматором ![]() и
входом радиоприемника.
и
входом радиоприемника.
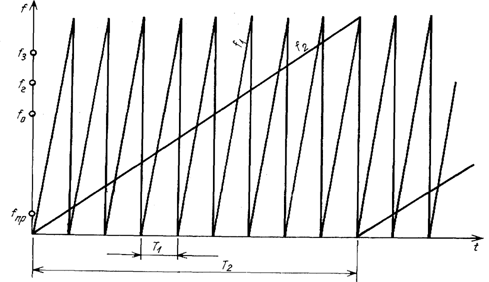
Рис.2 Частотно-временные диаграммы перестройки ГС1 и ГС2
В качестве индикатора (И)
применяют осциллограф, при этом генераторы развёрток подключают на оси ![]() и
и ![]() , а выходной
сигнал радиоприёмника подают на ось
, а выходной
сигнал радиоприёмника подают на ось ![]() (электрод яркости).
(электрод яркости).
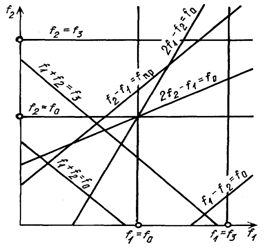
На экране
электронно-лучевого индикатора следует ожидать изображение, аналогичное
показанному на рис.3. Основной канал приёма представляет крестообразную фигуру,
пересекающиеся линии которой соответствуют равенствам ![]() и
и ![]() . Линии, пересекающиеся под прямым
углом и параллельные осям координат
. Линии, пересекающиеся под прямым
углом и параллельные осям координат ![]() и
и ![]() , изображают канал промежуточной
частоты, зеркальный канал и другие побочные каналы. Интермодуляционные помехи
на экране имеют форму наклонных прямых (см. рис.3). Каждый из
интермодуляционных каналов показан на экране в виде наклонной прямой.
, изображают канал промежуточной
частоты, зеркальный канал и другие побочные каналы. Интермодуляционные помехи
на экране имеют форму наклонных прямых (см. рис.3). Каждый из
интермодуляционных каналов показан на экране в виде наклонной прямой.
Аттенюатор является
важнейшим измерительным инструментом, с помощью которого определяют
восприимчивость приёмника к различным одиночным и двойным мешающим сигналам.
При перестройке генераторов следует обеспечить все разности из частот ![]() и
и ![]() , что при
наличии нелинейности в приёмнике приводит к образованию в тракте УПЧ комбинаций
, что при
наличии нелинейности в приёмнике приводит к образованию в тракте УПЧ комбинаций
![]() . Отклики
приёмника позволяют оценить восприимчивость приёмника на частотах,
соответствующих односигнальной и двухсигнальной избирательности.
. Отклики
приёмника позволяют оценить восприимчивость приёмника на частотах,
соответствующих односигнальной и двухсигнальной избирательности.
Таким образом, новый подход к приёмнику с позиций ЭМС породил и новый метод построения измерительной аппаратуры. Статистическая теория ЭМС легко обосновывает целесообразность использования такого метода и дает возможность рассчитать основные характеристики реализующих его устройств.
1.Обзор патентной и технической документации
Изобретение относится к радиотехнике и может использоваться для контроля восприимчивости радиоприёмника к помехам по неосновным каналам приёма.
Цель изобретения – повышение достоверности контроля.
На (рис.1) представлена структурная схема предложенного устройства.
Устройство контроля восприимчивости радиоприёмника к помехам содержит генератор 1 тактовых импульсов, первый делитель частоты 2, первый генератор 3 пилообразного напряжения, первый генератор 4 качающейся частоты, первый счётчик 5 импульсов, второй генератор 6 пилообразного напряжения, второй генератор 7 качающейся частоты, сумматор 8, мультиплексор 9, первый дешифратор 10, управляемый аттенюатор 11, индикатор 12, блок 13 запуска, амплитудный детектор 14, компаратор 15, второй делитель частоты 16, второй счётчик 17 импульсов, второй дешифратор 18, показан также контролируемый радиоприёмник 19.
Устройство работает следующим образом.
Импульсы с выхода генератора 1 тактовых импульсов с периодом следования Тx поступают на первый делитель частоты 2 с коэффициентом деления Ny, а также запускают второй генератор 6 пилообразного напряжения, который управляет вторым генератором 7 качающейся частоты. При этом имеет место качание частоты fx в диапазоне Df с периодом Тx. С выхода первого делителя частоты 2 импульсы с периодом Ty поступают на первый генератор 3 пилообразного напряжения, который управляет первым генератором 4 качающейся частоты. При этом имеет место качание частоты fy в диапазоне Df с периодом T2/
![]() (1.1)
(1.1)
![]() (1.2)
(1.2)
![]() (1.3)
(1.3)
где Df - диапазон перестройки генераторов по частоте;
 - полоса пропускания усилителя
промежуточной частоты (наиболее узкополосного звена) контролируемого
радиоприёмника 19.
- полоса пропускания усилителя
промежуточной частоты (наиболее узкополосного звена) контролируемого
радиоприёмника 19.
Сканирование по диапазону Df происходит по линейному закону, что соответствует гипотенузе о равномерном распределении частот мешающих сигналов. Уровень мощностей первого и второго генераторов 4, 7 качающейся частоты одинаков, поскольку нет оснований для установления других соотношений. Далее сигналы поступают на сумматор 8, с выхода которого суммарный сигнал поступает на сигнальный вход управляемого аттенюатора 11.
Импульсы с выхода генератора 1 тактовых импульсов поступают также на первый счётчик 5 импульсов, количество разрядов которого определяется из выражения:
![]() ; (1.4)
; (1.4)
где ![]() - коэффициент давления
первого делителя частоты 2;
- коэффициент давления
первого делителя частоты 2;
h – количество уровней управляемого аттенюатора 11;
k – разрядный двоичный код с выхода первого счётчика импульсов 5 поступает на вход мультиплексора 9. Мультиплексор 9 предназначен для выделения из общей последовательности импульсов за время измерения
![]()
тех импульсов время появления которых соответствует времени переключения управляемого аттенюатора 11 на каждую i-ю ступень.
Исходя из вероятностного закона распределения мощностей непреднамеренных помех являющегося в данном случае энергетической моделью электромагнитной обстановки:
![]() ;
;
Где b – нормирующий множитель;
m – степень гиперболы;
P – мощность непреднамеренной помехи;
P0 – чувствительность контролируемого радиоприёмника 19;
Pб – мощность блокирующей помехи;
найдём относительное время появления необходимых импульсов:
 (1.5)
(1.5)
где А=Р1/Р0 – относительный диапазон мощностей непреднамеренных помех;
R=(m-1)*2-k*Pбm-1/b; (1.6)
 - относительное время следования
импульсов;
- относительное время следования
импульсов;
![]() - номер ступени управляемого
аттенюатора 11.
- номер ступени управляемого
аттенюатора 11.
При наступлении времени t(i) на выходе мультиплексора 9 вырабатывается двоичный код номера i, который преобразуется первым дешифратором 10 в сигнал, переключающий управляемый аттенюатор 11 на i-ю ступень.
Таким образом, на выходе управляемого аттенюатора 11 формируется зондирующее воздействие, соответствующее энергетической и частотной модели реальной электромагнитной обстановки.
С выхода управляемого аттенюатора 11 зондирующее воздействие подаётся на вход контролируемого радиоприёмника 19, отклики которого с выхода его усилителя промежуточной частоты поступают на амплитудный детектор 14, с выхода которого огибающая отклика поступает на компаратор 15, предназначенный для нормирования амплитуды отклика для согласования с входными уровнями цифровых микросхем. Импульсы, соответствующие откликам, поступают на в0торой делитель частоты 16 с коэффициентом деления
![]()
N0 соответствует количеству откликов, возникающих на выходе контролируемого радиоприёмника 19 за время измерения Ти за счёт основных каналов приёма. Таким образом, на выходе второго счётчика импульсов 17 получают двоичный код
![]() , (1.7)
, (1.7)
где Nc – общее количество откликов на выходе контролируемого радиоприёмника 19 за время измерения Т3 (за счёт как основных каналов приёма, так и побочных).
Физический смысл величины G виден из выражения:
![]() , (1.8)
, (1.8)
где ![]() - эквивалентная по числу
проникающих сигналов полоса пропускания радиоприёмника с учётом побочных
каналов приёма.
- эквивалентная по числу
проникающих сигналов полоса пропускания радиоприёмника с учётом побочных
каналов приёма.
Таким образом, G – статистическая характеристика контролируемого радиоприёмника 19, показывающая относительную ширину эквивалентной по числу проникающих сигналов полосы пропускания контролируемого радиоприёмника 19 в условиях реальной электромагнитной обстановки.
Двоичный код, полученный в результате измерения величины G, поступает на второй дешифратор 18, на выходе которого подключён индикатор 12.
После прохождения через первый счётчик 5 всей совокупности импульсов на его выходе переполнения появится импульс блокировки, поступающий на вход блока 13 запуска, на выходе которого появится потенциал, блокирующий работу генератора 1, и процесс контроля прекратится. Таким образом, время измерения строго стабилизировано, и цикл изменения полностью автоматизирован.
При очередном запуске после нажатия кнопки, входящей в состав блока 13 запуска, на выходе блока 13 запуска вырабатывается импульс установки первого и второго счётчиков 5, 17 импульсов и первого и второго делителей частоты 2, 16 в нулевое состояние, и процесс измерения повторится.
Формула изобретения
Устройство контроля восприимчивости радиоприёмника к помехам, содержащее первый и второй счётчики импульсов, индикатор, управляемый аттенюатор, выход которого является входом контролируемого радиоприёмника, амплитудный детектор, сумматор, выход которого соединён с информационным входом управляемого аттенюатора, последовательно соединённые генератор тактовых импульсов, первый делитель частоты, первый генератор пилообразного напряжения и первый генератор качающейся частоты, второй делитель частоты, последовательно соединённые второй генератор пилообразного напряжения, вход которого соединён с выходом генератора тактовых импульсов, и второй генератор качающейся частоты, отличающееся тем, что, с целью повышения достоверности контроля, введены блок запуска , компаратор, последовательно соединённые мультиплексор, вход которого соединён с информационным выходом первого счётчика импульсов, и первый дешифратор, выход которого соединён с управляющим входом управляемого аттенюатора, второй дешифратор, вход и выход которого соединены соответственно с выходом второго счётчика импульсов и входом индикатора, вход амплитудного детектора является выходом контролируемого радиоприёмника, а выход амплитудного детектора подключён к входу компаратора, выход которого соединён с входом второго делителя частоты, выход которого соединён с информационным входом второго счётчика импульсов, выходы первого и второго генераторов качающейся частоты соединены соответственно с первым и вторым входами сумматора, выход генератора тактовых импульсов соединён с входом первого счётчика импульсов, выход переполнения которого соединён с входом блока запуска, выход которого подключён к входу запрета генератора тактовых импульсов и к входу установки нуля первого и второго делителей частоты первого и второго счётчиков импульсов.
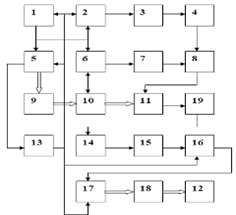
Рис.1 Структурная схема устройства контроля восприимчивости радиоприёмника к помехам
2. Разработка структурной схемы устройства
2.1 Расчёт основных системных показателей
В данном разделе даётся описание метода обобщенной (однокритериальной) оценки частотной избирательности радиоприёмника, а так же соображения о построении аппаратуры. Предполагается применение двухчастотного зондирования с имитацией статистических характеристик прогнозируемой электромагнитной обстановки. Были получены количественные соотношения, характеризующие метод, среди которых важнейшим следует считать формулы для расчёта минимального времени контроля; анализируются пути его уменьшения. Частотная избирательность радиоприемников (РПр) является важнейшей характеристикой, во многом определяющей способность радиотехнической системы к совместной работе с другими радиосредствами.
Резкое усложнение ЭМО и обострение проблемы ЭМС требуют учета взаимодействия непреднамеренных радиопомех (НРП) между собой на нелинейных элементах самого РПрУ. В связи с этим целесообразно применить многосигнальное (хотя бы двухсигнальное) воздействие. Прототипом описываемого здесь метода может служить известный [4] более чем 12 лет, разработанный в Минском радиотехническом институте, метод двухчастотного зондирования. Предлагается дальнейшее развитие метода, состоящее в следующем: зондирующие сигналы должны воспроизводить статистические свойства НРП, в частности по вероятностным распределениям несущих частот и мощности; конечный результат должен формироваться как интегральный, полученный при установке прогнозируемых условий работы РПрУ. Краткое описание метода опубликовано в [5,6].
Структурная схема устройства, реализующего предлагаемый метод, изображена на рис.2.1. Управление сканированием частот соответственно управляемых генераторов УГ1 и УГ2 в диапазоне Df, осуществляется програмно по линейному закону.
Выбор количества генераторов равного двум обусловлен тем, что большинство вопросов, связанных с влиянием интермодуляции, могут быть решены на основе изучения случая взаимодействия двух сигналов. Выбор двух сигналов обосновывается и тем, что вероятность проникновения на вход первого нелинейного элемента РПрУ одновременно трех и более помеховых сигналов с мощностью, достаточной для образования интермодуляции для большинства современных РПрУ значительно меньше вероятности проникновения двух сигналов с такими же параметрами, а сложность процессов, происходящих в РПрУ и время измерения значительно возрастают при увеличении количества взаимодействующих сигналов.
Если считать функции f1(t) и f2(t) случайными, то можно обеспечить соответствие вероятностных распределений w(f) в диапазоне частот Df заданной ЭМО. В частном случае можно имитировать равномерное распределение несущих частот непреднамеренных радиопомех (НРП).
Сигналы УГ1 и УГ2 после прохождения соответственно аттенюаторов АТ1 и АТ2 складываются в сумматоре (С).
Микроконтроллер управляет
коэффициентом затухания управляемого аттенюатора АТ1 и АТ2, обеспечения
изменение мощности зондирующего сигнала по заданному закону Р(t) в диапазоне DP
(![]() ). При
этом за время измерения имитируемое ансамблевое распределение мощностей
испытательных сигналов аналогично вероятностному распределению w(Р),
получаемому методом статистических испытаний за произвольный период времени.
). При
этом за время измерения имитируемое ансамблевое распределение мощностей
испытательных сигналов аналогично вероятностному распределению w(Р),
получаемому методом статистических испытаний за произвольный период времени.
Таким образом, контролируемый РПрУ подвергается воздействию двух сигналов, имеющих заданные вероятностные распределения частот w(f) и мощностей w(P), которые должны соответствовать распределениям, полученным на основе изучения или прогнозирования реальной ЭМО. Это существенно сближает условия измерения и эксплуатации.
В предлагаемом устройстве оценка частотной избирательности происходит косвенно, путём определения числа:
![]() (2.1)
(2.1)
где ![]() -количество откликов на
выходе контролируемого РПрУ, возникающих за время измерения и обусловленных как
основным, так и не основными каналами приёма;
-количество откликов на
выходе контролируемого РПрУ, возникающих за время измерения и обусловленных как
основным, так и не основными каналами приёма; ![]() - количество откликов,
обусловленных основным каналом приёма.
- количество откликов,
обусловленных основным каналом приёма.
Так как величина ![]() известна
заранее, то аппаратурная реализация вычислений по выражению (2.1) не
представляет значительного труда. Эту функцию выполняет вычислитель т.е.
микроконтроллер.
известна
заранее, то аппаратурная реализация вычислений по выражению (2.1) не
представляет значительного труда. Эту функцию выполняет вычислитель т.е.
микроконтроллер.
Можно показать, что
измеряемая величина ![]() монотонно связана с эквивалентной
по числу проникающих сигналов полосой пропускания
монотонно связана с эквивалентной
по числу проникающих сигналов полосой пропускания ![]() , являющейся расчётной
статистической характеристикой, реальной частотной избирательности РПрУ.
, являющейся расчётной
статистической характеристикой, реальной частотной избирательности РПрУ.
Вид функциональной
зависимости величин ![]() и
и ![]() , в общем случае, зависит от
соотношения динамического диапазона радиоприёмника и диапазона мощностей помех,
действующих на его входе.
, в общем случае, зависит от
соотношения динамического диапазона радиоприёмника и диапазона мощностей помех,
действующих на его входе.
При использовании метода существует проблема сокращения времени измерения. Пути решения проблемы могут быть определены, исходя из анализа, общего выражения для времени измерения, которое в первом приближении может быть получено из следующих соображений.
С определенной погрешностью можно считать, что динамические эффекты в контролируемом РПрУ отсутствуют, если скорость перестройки частоты испытательного сигнала не превышает величины:
![]() (2.2)
(2.2)
где ![]() Гц - полоса пропускания
контролируемого РПрУ.
Гц - полоса пропускания
контролируемого РПрУ.
На нелинейных элементах
РПрУ интермодуляционные каналы приёма образуются преобразованием функций ![]() и
и ![]() по закону:
по закону:
![]() (2.3)
(2.3)
где ![]() и
и ![]() - целые числа;
- целые числа;![]() порядок
интермодуляции.
порядок
интермодуляции.
Пусть скорость перестройки
первого генератора ![]() намного больше скорости
перестройки второго генератора
намного больше скорости
перестройки второго генератора ![]() . В этом случае скорость
перестройки
. В этом случае скорость
перестройки ![]() -ой
гармоники первого генератора не должна превышать величины
-ой
гармоники первого генератора не должна превышать величины ![]() . При этом должно
выполняться неравенство:
. При этом должно
выполняться неравенство:
![]() (2.4)
(2.4)
Подставляя в (2.4) выражение (2.2), получим:
![]() (2.5)
(2.5)
При этом сканирование УГ1 в пределах диапазона Df произойдет за время:
![]() (2.6)
(2.6)
При дискретном изменении
частоты второго генератора в диапазоне Df дискретность не должна превышать
величины ![]() .
.
Таким образом, количество перестроек второго генератора в диапазоне Df равно:
![]() (2.7)
(2.7)
Минимальное время, в
течении которого частота второго генератора УГ2 остается постоянной, не должно
превышать времени ![]() . При этом перестройка УГ2 в
диапазоне Df произойдет за время:
. При этом перестройка УГ2 в
диапазоне Df произойдет за время:
![]() ,
,
или, с учётом (6) и (7), получим:
![]() (2.8)
(2.8)
Зависимость P(t),
имитирующая заданное распределение w(P), реализуется с помощью УА, имеющего h
уровней затухания. Период времени, в течении которого уровень мощности ![]() зондирующего
сигнала остается постоянным, не должен быть меньше
зондирующего
сигнала остается постоянным, не должен быть меньше ![]() . Поэтому общее минимальное время
измерения составит:
. Поэтому общее минимальное время
измерения составит:
![]() (2.9)
(2.9)
При этом имеется ввиду, что обработка получаемой информации происходит в течении времени измерения.
Таким образом, время
измерения определяется: количеством h уровней УА, зависящим, в общем случае, от
диапазона мощностей DP испытательных сигналов и требуемой точности измерений;
диапазоном частот Df испытательных сигналов; наибольшим номером ![]() гармоники
испытательного сигнала, оказывающей влияние на результат измерений и полосы
гармоники
испытательного сигнала, оказывающей влияние на результат измерений и полосы ![]() испытуемого
РПрУ.
испытуемого
РПрУ.
Величина ![]() может быть оценена
исходя из того, что амплитуды высшие составляющих с ростом номера гармоники
быстро падают, и практически имеет смысл учитывать порядок интермодуляции не
более 10.
может быть оценена
исходя из того, что амплитуды высшие составляющих с ростом номера гармоники
быстро падают, и практически имеет смысл учитывать порядок интермодуляции не
более 10.
Динамический диапазон зондирующего сигнала по мощности
![]()
определяют на основе изучения реальной (прогнозируемой) ЭМО, в которой будет эксплуатироваться контролируемый РПрУ, с учётом возможного его сужения с использованием соответствующих положений статистической теории ЭМС [3].
В результате такого изучения должны быть известны максимальная и минимальная мощности НРП и вероятностное распределение w(P).
Диапазон Df выбирают
исходя из величины ![]() и характеристик модели РПрУ.
Предположим для определенности, что исследуемый РПрУ имеет одноконтурную
входную цепь (БЦ), нормированная передаточная характеристика по мощности
которой известна:
и характеристик модели РПрУ.
Предположим для определенности, что исследуемый РПрУ имеет одноконтурную
входную цепь (БЦ), нормированная передаточная характеристика по мощности
которой известна:
 (2.10)
(2.10)
где ![]() -полоса пропускания ВЦ
на уровне 0,5.
-полоса пропускания ВЦ
на уровне 0,5.
Известен также порог
чувствительности РПрУ ![]() .
.
Можно показать, что при
![]() ,
,
где ![]() - границы частотного
диапазона зондирования, диапазон частот равен (учитывая,
- границы частотного
диапазона зондирования, диапазон частот равен (учитывая, ![]() ):
):
![]() (2.11)
(2.11)
При этом будут учтены все
сигналы с мощностью, не меньшей величины ![]() могущие проникнуть на вход
первого нелинейного элемента (НЭ) РПр.
могущие проникнуть на вход
первого нелинейного элемента (НЭ) РПр.
Рассмотрим возможности сокращения времени измерения, не приводящие к существенной потере точности измерения .
При мощности НРП, не превышающей
некоторую верхнюю величину ![]() , процессы, происходящие в первом
НЭ имеют преимущественно линейный характер. Результат такого воздействия может
быть определен аналитически.
, процессы, происходящие в первом
НЭ имеют преимущественно линейный характер. Результат такого воздействия может
быть определен аналитически.
Вероятность появления НРП
в реальной ЭМО уменьшается с увеличением их интенсивности. Поэтому может быть
определен интервал мощностей ![]() , вероятность присутствия НРП за
пределами которого не превышает допустимой величины
, вероятность присутствия НРП за
пределами которого не превышает допустимой величины ![]() , определяющую точность измерений.
В связи с этим верхнюю границу имитируемого диапазона мощностей испытательных
сигналов целесообразно ограничить величиной
, определяющую точность измерений.
В связи с этим верхнюю границу имитируемого диапазона мощностей испытательных
сигналов целесообразно ограничить величиной![]() .
.
Таким образом, получаем практический вероятный динамический диапазон мощностей
![]()
Подставляя это выражение в уравнение (2.11) получим практический диапазон частот сканирования генераторов УГ1 и УГ2, позволяющий получить результаты измерений с точностью, не ниже заданной.
![]()
![]() Таким
образом, можно получить значительный выигрыш во времени измерения.
Таким
образом, можно получить значительный выигрыш во времени измерения.
3. Разработка функциональной схемы
Генераторы с плавной перестройкой в широком диапазоне частот и их разновидность — генераторы качающейся частоты — используются в панорамных приёмниках и анализаторах спектра, в измерителях частотных характеристик, в следящих фильтрах и других радиоэлектронных устройствах [13]. К важнейшим показателям качества таких ДГН относятся: перекрытие максимального диапазона частот, обеспечение заданного закона электронной перестройки частоты, минимальные нелинейные искажения колебаний, которые должны реализовываться при высоких показателях качества второй группы. При этом рассмотрение характеристик ДГН с одним управителем частоты, работающих в диапазоне от коротких до миллиметровых волн, свидетельствует о принципиальных технических трудностях, с которыми сопряжено выполнение комплекса перечисленных требований.
Повышению эффективности генераторов плавного диапазона, выполненных на основе ДГН с согласованной настройкой управителей частоты, способствует возможность использования сравнительно простых электронных устройств, для автоматической настройки одного или нескольких ведомых управителей по определенному закону при регулировке ведущего управителя частоты.
Принцип действия автоматических устройств, используемых для согласованной настройки управителей в рассматриваемых генераторах, основан на зависимости амплитуды колебаний от расстояния изображающей точки генератора в пространстве параметров до колебательной границы устойчивости (КГУ): при увеличении этого расстояния амплитуда колебаний увеличивается, а при его уменьшении уменьшается. Следовательно, для стабилизации амплитуды колебаний в диапазоне перестройки частоты при регулировке одного из управителей частоты другие должны подстраиваться таким образом, чтобы закону перестройки управителей соответствовало движение ИТ генератора в пространстве его параметров на неизменном расстоянии до КГУ.
Таким образом, назначение устройств автоподстройки управителей частоты в рассматриваемых ДГН состоит в том, чтобы при независимой регулировке ведущего управителя, приводящей к изменению амплитуды колебаний, сформировать управляющий сигнал, обеспечивающий подстройку другого (или других) управителя частоты в направлении, соответствующем стабилизации амплитуды колебаний.
В качестве примера рассмотрим реализацию описанного принципа в генераторе на негатроне типа N с параллельным LC-контуром и парой резистивных управителей частоты. Функциональная схема устройства показана на рис.3.1 . В его состав входят: генератор 1 с управителями частоты 5 и 6, широкополосный усилитель 2, амплитудный детектор 3, усилитель постоянного тока (УПТ) 4. Узлы 2-4 используются для автоматической подстройки управителя 6 при регулировке управителя 5 с помощью управляющего сигнала источника.
Принцип действия устройства состоит в следующем. Управитель 5 включён в индуктивную ветвь колебательного контура и выполняет функции переменного резистора RL, управитель 6 в емкостной ветви контура используется в качестве переменного резистора Rс (см. рис.5.2). Устройство настраивается так. чтобы в начальный момент времени номиналы сопротивлений
![]() и
и ![]()
были максимальными, причём частота колебаний минимальна. Затем значение RL уменьшается и приводит к увеличению амплитуды колебаний генератора, а следовательно, к повышению напряжения усилителя 2, амплитудного детектора 3 и увеличению тока УПТ 4 Тип и полярность включения управителя 6 выбрано такими, чтобы увеличение тока УПТ приводило к увеличению сопротивления управителя переменному току, уменьшению амплитуды колебаний до первоначального значения и увеличению их частоты. Дальнейшее уменьшение значения сопротивления RL приводит к еще большему повышению частоты, причём описанный процесс продолжается до тех пор, пока частота колебаний генератора не достигнет верхней границы диапазона перестройки.
Принципиальная схема
генератора плавного диапазона, в которой реализуется согласованная настройка
резистивных управителей частоты, показана в приложении. Генератор выполнен на
ТД типа ГИ103Б (Д2). Номиналы элементов схемы рассчитаны в пункте 5.2, и
указаны на схеме. Функции резистивных управителей частоты выполняют реостат R1
и точечный полупроводниковый диод Д1. Использование реостата R1 в качестве
ведущего управителя частоты удобно при выполнении измерений в дискретных точках
диапазона. На ТД подается напряжение смещения Uсм=170 мВ, соответствующее
значению ![]() Ом.
Ом.
Шунтирование реостата R1 дросселем L1 обеспечивает стабилизацию смещения на ТД при регулировке реостата.
Система автоматической подстройки дифференциального сопротивления диода Д1 при регулировке реостата R1 содержит: широкополосный усилитель, собранный на транзисторах Т1 и Т2; амплитудный детектор, выполненный на диодах Д3 и Д4; УПТ на интегральной микросхеме А1 (операционный усилитель типа К1УТ401А) и транзистор Т3. Для обеспечения функционирования устройства в соответствии с описанным выше принципом при его настройке необходимо учитывать следующие факторы: для реализации выбранного закона перестройки частоты, характеристика амплитудного детектора должна быть такой, чтобы увеличение амплитуды колебаний генератора (а, следовательно, и выходного напряжения усилительного каскада на Т2) приводило к уменьшению выпрямленного тока и наоборот; для обеспечения минимальных нелинейных искажений широкополосный усилитель должен работать в режиме класса А и его АЧХ должна иметь минимальную неравномерность в диапазоне перестройки частоты; коэффициенты усиления усилительных каскадов и постоянная времени амплитудного детектора должны выбираться с учетом комплекса технических требований по обеспечению высокой скорости перестройки частоты в наиболее широком диапазоне при устойчивой работе системы автоподстройки управителя частоты.
В описанной схеме коэффициент усиления широкополосного усилителя по напряжению Ки =40 дБ, причём напряжение практически не отличается от синусоидального в полосе перестройки частоты 3,95—24,6 МГц. В процессе перестройки дифференциальное сопротивление диода Д1 изменяется от 3 до 100 Ом, что соответствует изменению напряжения на диоде от 07 до 0,25 В.
Для работы устройства в режиме генератора качающейся частоты вместо реостата R1 в схеме на рис. 21 следует использовать полупроводниковые резисторы (см. § 4) с соответствующими источниками управляющего напряжения или тока. При этом могут наблюдаться снижение устойчивости работы системы авторегулирования, сужение частотного диапазона и повышение нелинейных искажений. Устранение этих недостатков обеспечивается путём подстройки режима системы авторегулирования с помощью реостатов R13, R15 и коррекции сигналов, используемых для перестройки управителей частоты.
В описанном устройстве, а также в генераторах, выполненных по другим схемам (см. табл. 2), при понижении и повышении центральной частоты наблюдается соответственно расширение и сужение диапазона перестройки. Это подтверждает теоретические выводы относительно ограничивающего влияния реактивностей негатронов на диапазон перестройки частоты (см. § 8). Поэтому при создании высокочастотных генераторов с перестройкой частоты по методу СНУЧ целесообразно применять наиболее высокочастотные из современных негатронов: ТД, ИПД, ЛПД, ДГ [ ] в сочетании с полупроводниковыми управляющими устройствами, используемыми в диапазоне СВЧ [ ].
При этом следует учитывать особенности физических процессов в генераторах на негатронах с динамическим отрицательным сопротивлением. Так, ДГ ведут себя как устойчивые отрицательные сопротивления при работе в режимах с подавлением домена и ограниченным накоплением объемного заряда [ и др.]. Такие режимы возникают в генераторах, у которых добротность колебательной системы настолько велика, что амплитуда колебаний высокочастотного напряжения на ДГ может оказаться соизмеримой с напряжением питания или его превышать. Поэтому в генераторах на ДГ согласованная настройка управителей частоты должна осуществляться таким образом, чтобы добротность колебательной системы понижалась незначительно. Для реализации такой перестройки можно, например, рекомендовать регулировку связи генератора с нагрузкой и соответствующее изменение тока подмагничивания магнитной системы ЖИГ, имеющей острую резонансную кривую [ ].
В генераторах на ЛПД наиболее простым способом реализации метода СНУЧ представляется регулировка связи генератора с нагрузкой и соответствующее изменение тока питания диода [ ].
Отметим, что в СВЧ генераторах с автоматической электронной настройкой управителей частоты и усиление, и детектирование колебаний могут выполняться в каскадах, собранных на негатронах [ ], т.е. существует принципиальная возможность реализации генераторов плавного диапазона на негатронах.
4. Электрический расчёт
4.1 Электрический расчёт аттенюатора
Аттенюатором (ослабителем) называется устройство, предназначенное для уменьшения (ослабления) в требуемое число раз электрической мощности, а следовательно, напряжения и тока, поступающих от источника сигнала в нагрузку.
Установка необходимой величины затухания аттенюатора производится переключением звеньев, каждое из которых представляет собой П-образное звено. Группа звеньев применяется вместо одного звена для уменьшения частотной погрешности затухания при большом затухании в звене. Дополнительным источником частотной погрешности затухания аттенюатора является ёмкостные связи между его входом и выходом, а также между отдельными звеньями. Эти связи приводят к уменьшению затухания с увеличением частоты и проявляется тем сильнее, чем больше величина затухания, установленная на аттенюаторе. Для устранения этих связей производится установка звеньев в отдельные отсеки или разделение звена экранирующей перегородкой. Затухание аттенюатора определяется суммой затуханий включённых звеньев.
Для построения звеньев, оптимальным является выбор металлоплёначных резисторов с сопротивлениями 50…250 Ом и мощностью рассеивания 03…05 Вт. Реактивные составляющие элементов аттенюатора нужно учитывать, как правило, на частотах свыше 30 МГц. В высокочастотной области необходимо избегать применения аттенюаторов с затуханием >30 дб, а большее значение затухания следует обеспечить с помощью каскадного соединения нескольких звеньев; сопротивления <50 Ом и >250 Ом рекомендуется «набирать» путём соединения (параллельного или последовательного соответственно) нескольких резисторов с номиналами (желательно различными), попадающими в область оптимальных значений. На Рис.4.1 изображено одно из звеньев аттенюатора.
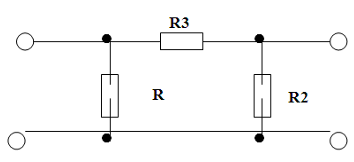
Рис. 4.1 П-образное звено аттенюатора
Расчёт резисторов будет рассчитываться по формулам;
![]()
![]()
![]()
Так как аттенюатор симметричный, то r1=r2, отсюда следует, что R1=R2
Затухание a должно быть представлено в Нп.
1.Рассчитаем номиналы R1,R2,R3 для случая когда
a=1дБ=0.115Нп
![]() Нп
Нп
![]() Ом
Ом ![]() Ом
Ом
![]()
![]() Ом
Ом
![]()
![]() Ом
Ом
2. ![]() Нп
Нп
![]()
![]() Ом
Ом
![]()
![]() Ом
Ом
3. ![]() Нп
Нп
![]()
![]() Ом
Ом
![]()
![]() Ом
Ом
![]()
![]() Нп
Нп
![]()
![]() Ом
Ом
![]()
![]() Ом
Ом
![]()
![]() Нп
Нп
![]()
![]() Ом
Ом
![]()
![]() Ом
Ом
6. ![]() Нп
Нп
![]()
![]() Ом
Ом
![]()
![]() Ом
Ом
![]()
![]() Нп
Нп
![]()
![]() Ом
Ом
![]()
![]() Ом
Ом
4.2 Электрический расчёт управляемого генератора
Современный генератор синусоидальных колебаний с электронной перестройкой частоты представляет собой достаточно сложное устройство, эффективность которого зависит от большого числа показателей. Определённые успехи в совершенствовании генераторов, работающих в интервале от коротких до миллиметровых волн, связаны с разработкой новых полупроводниковых приборов с отрицательным (негативным) дифференциальным сопротивлением – негатронов.
Проектирование диапазонного генератора на негатроне (ДГН), как и любой системы состоит из двух основных этапов, первый из которых предполагает обоснование исходных данных (технического задания) для проектирования, а второй - разработку ДГН, удовлетворяющего требованиям технического задания.
Расчёт диапазонных характеристик генератора
![]()
![]()
![]()
![]()
![]()
![]()
Для расчёта L и C воспользуемся выражением
![]()
![]()
![]() (4.2.1)
(4.2.1)
Рассчитаем относительное характеристическое сопротивление
![]()
![]() (4.2.2)
(4.2.2)
![]()
![]() (4.2.3)
(4.2.3)
![]()
![]() (4.2.4)
(4.2.4)
Определим допустимые значения паразитных параметров Cn и Lд
![]()
![]()
![]() (4.2.5)
(4.2.5)
Индуктивность дросселя запишется, как
![]()
![]() (4.2.6)
(4.2.6)
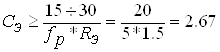
В состав управляемого генератора входит широкополосный усилитель собранный на транзисторе КТ361Г.
Параметры для расчёта: Rвых=46 кОм; Rвх=6.25 кОм; Ек=9 В; Ск=7 пФ;
Iк=1 мА; S=25 мА/В; V=4
Определяем максимально допустимый коэффициент усиления;
 (4.2.7)
(4.2.7)
Эквивалентное сопротивление нагрузки:
 кОм (4.2.8)
кОм (4.2.8)
Величина сопротивления в цепи коллектора;
![]() См (4.2.9)
См (4.2.9)
![]() кОм, т.е.
кОм, т.е. ![]() Ом
Ом
Реальное эквивалентное сопротивление:
 См (4.2.10)
См (4.2.10)
![]() кОм
кОм
Коэффициент усиления усилителя:
![]() (4.2.11)
(4.2.11)
Задавшись величиной
напряжения ![]() В,
В,
определяем сопротивление термокомпенсации:
![]() (4.2.12)
(4.2.12)
Определяем сопротивления делителя:
 кОм; (4.2.13)
кОм; (4.2.13)
 кОм. (4.2.14)
кОм. (4.2.14)
Ёмкость в цепи эмиттера:
 пФ,
пФ,
и из стандартного ряда
выбираем ![]() пФ.
пФ.
Определяем входное сопротивление усилителя:
 См (4.2.15)
См (4.2.15)
![]() кОм
кОм
Разделительная ёмкость:
 , т.е.
, т.е. ![]() пФ. (4.2.16)
пФ. (4.2.16)
Схема широкополосного усилителя представлена на рис.4.2.1
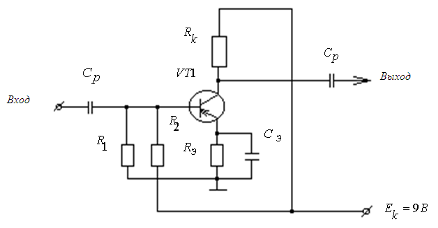
Рис. 4.2.1 Схема широкополосного усилителя
4.3 Электрический расчёт сумматора
В этом устройстве сумматор
представлен в виде широкополосного трансформатора. Для оптимального
использования полоса его рабочих частот должна быть выбрана несколько больше
ширины спектра сигнала. Обмотки трансформатора размещаются на тороидальном
сердечнике из феррита, обладающем соответствующими частотными и мощностными
свойствами с относительно высокой начальной магнитной проницаемостью ![]() и высоким
коэффициентом индуктивности
и высоким
коэффициентом индуктивности ![]() .
.
Тщательный выбор размеров
трансформатора приводит к тому, что вносимое им затухание ![]() будет менее 0.8 дБ, как
правило, 0.3-0.6 дБ, реже 0.1-0.3 дБ при сопротивлениях
будет менее 0.8 дБ, как
правило, 0.3-0.6 дБ, реже 0.1-0.3 дБ при сопротивлениях ![]() Ом, на частотах
Ом, на частотах ![]() МГц. При этом
коэффициент стоячей волны (КСВ) не превышает 1.25 (s £ 1.25).
МГц. При этом
коэффициент стоячей волны (КСВ) не превышает 1.25 (s £ 1.25).
Нужно заметить, что этот
трансформатор позволяет получить желаемый коэффициент трансформации, значение
которого может выбираться в широких пределах. Полоса рабочих частот составляет
около пяти октав при сопротивлениях ![]() 250 Ом. На более высоких частотах
следует учитывать ухудшение коэффициента трансформации и уменьшения полосы
пропускания, вызванные влиянием паразитной распределённой ёмкостной связи, а
также значительное увеличение вносимого затухания.
250 Ом. На более высоких частотах
следует учитывать ухудшение коэффициента трансформации и уменьшения полосы
пропускания, вызванные влиянием паразитной распределённой ёмкостной связи, а
также значительное увеличение вносимого затухания.
Эквивалентная электрическая схема и расположение обмоток на тороидальных сердечниках трансформатора приведена на рис.4.3.1.
Обмотки трансформаторов выполнены скрученными между собой проводами с целью получения оптимального коэффициента связи.
Рис. 4.3.1 Эквивалентная электрическая схема трансформатора
При разработке трансформатора использовалось два ферритовых кольца (внешний диаметр d1=24 мм, внутренний d2=18 мм), медный провод сечением S=0.4 мм, R1=100 Ом, R2=75 Ом, количество витков N=15 (получено экспериментально).
4.4 Расчёт широкополосного усилителя
В состав управляемого генератора входит широкополосный усилитель собранный на транзисторе КТ361Г.
Параметры для расчёта: Rвых=46 кОм; Rвх=6.25 кОм; Ек=9 В; Ск=7 пФ;
Iк=1 мА; S=25 мА/В; V=4
Определяем максимально допустимый коэффициент усиления;

Эквивалентное сопротивление нагрузки:
 кОм
кОм
Величина сопротивления в цепи коллектора;
![]() См
См
![]() кОм, т.е.
кОм, т.е. ![]() Ом
Ом
Реальное эквивалентное сопротивление:
 См
См
![]() кОм
кОм
Коэффициент усиления усилителя:
![]()
Задавшись величиной
напряжения ![]() В,
определяем сопротивление термокомпенсации:
В,
определяем сопротивление термокомпенсации:
![]()
Определяем сопротивления делителя:
 кОм;
кОм;
 кОм.
кОм.
Ёмкость в цепи эмиттера:
 пФ,
пФ,
и из стандартного ряда
выбираем ![]() пФ.
пФ.
Определяем входное сопротивление усилителя:
 См
См
![]() кОм
кОм
Разделительная ёмкость:
 , т.е.
, т.е. ![]() пФ.
пФ.
Схема широкополосного усилителя представлена на рис.4.3
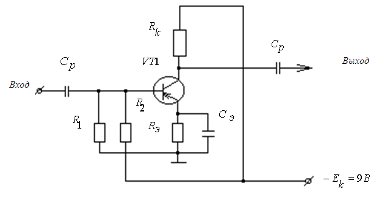
Рис. 4.3 Схема широкополосного усилителя
4.5 Двухсигнальная избирательность
Параметр избирательности по соседнему каналу даёт представление о том, насколько приёмник может противостоять появлению на его выходе побочных каналов приёма, не соответствующих частоте настройки. Однако он далеко не полностью отвечает на вопрос о том, насколько защищён приёмник от помех других радиостанций в то время, когда он принимает полезный сигнал. Этот вопрос решается измерением параметров двухсигнальной избирательности. При таких измерениях на вход подают полезный и мешающий сигналы и определяется входное напряжение модулированного мешающего сигнала, при котором его действие становится ощутимым (обычно за критерий принимают отношение сигнал/помеха на выходе равное 20 дб).
Двухсигнальная избирательность в отличии от односигнальной зависит от ряда дополнительных свойств приёмного тракта. К таким свойствам прежде всего относятся нелинейные эффекты взаимодействия полезного и мешающего сигналов, подавительные свойства детектора.
Слушатель, купивший РПУ, предъявляет к нему ряд требований. Он хочет прежде всего, чтобы его приёмник позволял принимать большое число станций. Обычно радиослушатель квалифицирует это свойство, как чувствительность приёмника, хотя, как будет видно дальше, это не совсем верно. Он хочет, чтобы радиостанции принимались «чисто», с минимальным количеством посторонних помех.
Выпускаемые в стране РПУ должны соответствовать по конструкции и нормам ГОСТ 5651-82 «Устройства радиоприёмные бытовые. Общие технические условия». Требования этого ГОСТ обеспечивают сопряжение радиовещательных приёмников с передающей сетью (диапазоны принимаемых частот, чувствительность, избирательность) и, кроме того, гарантируют определённое качество приёма, в частности качество звучания.
5. Разработка конструкции печатной платы
Под конструктивным расчетом печатной платы понимается расчет геометрических размеров платы, компоновка радиодеталей на плате, выбор материала платы и др.
В данном дипломном проекте необходимо произвести расчет платы управляемого генератора. В начале произведем расчет предполагаемой площади и геометрических размеров, затем выберем материал печатной платы, и произведем разводку. Для расчета площади платы необходимо подсчитать количество компонентов каждого класса, определить геометрические размеры этой платы.
По размещению проводящего рисунка печатные платы делятся на односторонние, двусторонние и многослойные.
Односторонняя печатная плата проста по конструкции и несложна в изготовлении, и идеально подходит для нашего устройства.
В качестве основного материала для печатных плат используется фольгированные и нефольгированные листовые диэлектрики. Исходными для изготовления фольгированных диэлектриков могут быть бумага или стеклоткань, пропитанные синтетическими смолами или полимерные пленки из лавсана, фторопласта. На поверхность этих материалов приклеивается металлическая фольга.
В качестве материала для печатной платы выберем стеклотекстолит фольгированный СТФ - 2 со следующими параметрами: толщина фольги 35 мкм, толщина материала с фольгой 2 мм, прочность сцепления 450 гс/3 мм.
Размещение элементов конструкции печатной платы регламентируется условной координатной сеткой из двух взаимно перпендикулярных систем параллельных линий, расположенных на одинаковом ( 2.5 мм или 1.25 мм) расстоянии друг от друга. Центры монтажных отверстий и контактных площадок под выводы навесных радиоэлементов располагают в узлах координатной сетки.
Расчет размеров печатной платы произведем по формуле:
Sэ = k*(S1 + S2) (5.1)
где Sэ-суммарная площадь элементов;
S1-площадь малых элементов;
S2-площадь больших элементов; k - коэффициент плотности.
Для определения суммарной площади определим количество элементов.
Таблица 5.1
| Наименование | Кол-во элементов, шт | Площадь элемента, см2 |
| РЕЗИСТОРЫ | 19 | 0.4 |
| КОНДЕНСАТОРЫ | 9 | 0.3 |
| ДИОДЫ | 3 | 0.4 |
| ДРОССЕЛИ | 1 | 5.5 |
| ТРАНЗИСТОРЫ | 3 | 0.6 |
| МИКРОСХЕМЫ | 1 | 1.5 |
S1=19´0,4+9´0,3+3´0,4+3´0,6=13,3 см2
S2=5,5+3´0,6+3´1,5=11,8 см2
К=12 , (Монтаж односторонний при средней плотности)
Sэ=4´(13,3+11,8)=100,4 см2
Печатная плата разведена вручную, элементы размещались на площади 75:110 мм. Перед разводкой произведена компоновка отдельных узлов с целью обеспечения электромагнитной совместимости. Слабосигнальные цепи располагаются удаленно от цепей питания и каскадов, которые могут влиять на них. При разводке минимизировалась длина проводников.
В результате конструктивного расчета получили, что устройство будет располагаться на односторонней стеклотекстолитовой фольгированной плате размерами 75х110 мм.
Вид печатной платы со стороны деталей изображен на чертеже «Конструкция печатной платы».
6. Технико-экономическое обоснование проекта
6.1 Характеристика проекта
Проектируемая система представляет собой устройство, предназначенное для определения частотной избирательности РПУ. Данное устройств построено на применении двухчастотного зондирования с имитацией статистических характеристик прогнозируемой электромагнитной обстановки. Оно включает в себя программируемый микроконтроллер, который в свою очередь управляет сканированием частот соответственно управляемых генераторов УГ1 и УГ2 в диапазоне Df, двух аттенюаторов, благодаря которым происходит выбор необходимого коэффициента затухания и сумматора в котором происходит складывания этих сигналов, а также блока питания. Блок питания обеспечивает работу всех компонентов входящих в данное устройство и питается напряжением 220 В от однофазной сети. В процессе работы устройство потребляет не более 50 мА.
Проектируемая система предназначена для контроля выпускаемых в нашей республике большого спектра РПУ, т.е. это могут быть РПУ как радиовещательные, так и телевизионные.
В системе применяется современная элементная база. Данное устройство являются цифро-аналоговым.
Изюминкой данной системы является применение PIC-контроллеров фирмы MicroChip. Они оптимально подходят для применения в системах подобного класса ввиду низкого энергопотребления, дешевизны этих приборов, простоты программирования. Применение этих микроконтроллеров позволяет снизить потребляемый ток до уровня порядка 20 мА.
По сравнению с существующими аналогами проектируемая система превосходит их по энергопотреблению, а также в короткое время определить качество выпускаемой продукции, возможности работы в полевых условиях и т.д.
Например, раньше на оценку качества уходило порядка 40 минут, а благодаря данному устройству это можно сделать за 5 минут, причём всё это происходит автоматически. Стоимость такого типа систем составляет 123 тыс. руб. за устройство. Стоимость проектируемой системы ожидается значительно меньше, чем у существующих аналогов.
6.2 Выбор методики расчета экономического эффекта
Расчет экономического эффекта будем производить по методике, изложенной в [14].
Экономический эффект рассчитывается для предприятия-производителя новой техники.
В соответствии с этой методикой вначале рассчитываются затраты, а затем себестоимость и отпускная цена. Затраты в сфере потребления в данном случае на экономический эффект не влияют и поэтому не учитываются. Производство изделия предполагается организовать на негосударственном предприятии, при этом НИОКР предприятие не производит, а покупает. В расчетах сохранено соответствие существующему налоговому законодательству.
Экономический эффект мероприятий научно-технического прогресса (НТП) рассчитывается по условиям изготовления продукции за расчетный период. Сумма по годам экономического эффекта рассчитывается по формуле:
Э = Р - З, (6.1)
где Э - экономический эффект от внедрения мероприятий НТП за расчетный период времени, руб.;
Р - стоимостная оценка результата от внедрения мероприятий НТП за расчетный период времени, руб.;
З - Стоимостная оценка затрат на производство за расчетный период времени, руб.
Под расчетным периодом понимается время, в течении которого капиталовложения оказывают воздействие на производственный процесс. В качестве расчетного периода производитель новой техники может принять прогнозируемый срок производства новой техники, потребитель - срок службы нового оборудования с учетом морального старения.
Разновременные затраты и результаты необходимо привести к расчетному году - году начала финансирования работ по осуществлению мероприятия. В нашем случае это 2000 - й год - год начала выпуска. Приведение осуществляется путем умножения результатов и затрат за каждый год на коэффициент приведения άt, равный:
άt = ( 1 + Ен ) tp- t, (6.2)
где Ен - норматив приведения разновременных затрат и результатов, который принимаем равным 0,2;
tр - расчетный год, tр = 1;
t - год, затраты и результаты которого приводятся к расчетному году ( tр ).
Под результатом будем понимать абсолютную величину прибыли, так как база для сравнения отсутствует. В качестве результата целесообразно принять прибыль, оставшуюся в распоряжении предприятия-производителя:
Пt = ( Цt - Сп - Оt ) * Nt * ( 1 - Ht / 100), (6.3)
Где Цt - прогнозируемая цена изделия в году t, руб.;
Сп - себестоимость единицы изделия в году t, руб.;
Оt - косвенный налог, включаемый в цену изделия в году t, руб.;
Nt - объем выпуска в году t, шт.;
Ht - процент налога на прибыль в году t, %.
6.3 Расчет стоимостной оценки затрат
Стоимостная оценка затрат у производителя новой техники определяется с учетом состава затрат, необходимых для ее разработки и производства.
Единовременные затраты в сфере производства включают предпроизводственные затраты (Кпп.з.) и капитальные вложения в производственные фонды завода-изготовителя (Кп.ф.):
Кп = Кпп.з. + Кп.ф. (6.4)
Предпроизводственные затраты определяются по формуле:
Кпп.з. = Sниокр + Косв, (6.5)
где Sниокр - сметная стоимость НИОКР, руб.;
Косв - затраты на освоение производства и доработку опытных образцов продукции, изготовление моделей и макетов, руб.
Предпроизводственные затраты учитываются полностью в составе единовременных затрат потребителя лишь в тех случаях, когда результаты предпроизводственной работы используются только для данного проектируемого изделия.
6.3.1 Определение сметной стоимости НИОКР
Ниже приводится смета, рассчитываемая по девяти статьям затрат.
Материалы и комплектующие.
Для проведения НИОКР требуются материалы и комплектующие, расчет затрат на которые приведен в таблице 6.1
Таблица 6.1
Расчет материалов и комплектующих
| № | Наименование | Единица измерения | Кол-во | Цена, руб | Сумма, руб |
| 1 | Писчая бумага | уп. | 2 | 2500 | 5000 |
| 2 | Канцелярский набор | шт. | 2 | 2500 | 5000 |
| 3 | Ватман | шт. | 7 | 300 | 2100 |
| 4 | Электроэнергия | Квт/ч. | 300 | 150 | 4500 |
| Итого: | 16600 | ||||
| Транспортно-заготовительные расходы (5%) | 830 | ||||
| Всего ( Рм ) | 17430 |
Спецоборудование.
Спецоборудование при разработке данного изделия не применялось, следовательно, затраты на статью '' Спецоборудование'' равны нулю.
Расходы на оплату труда.
Основная заработная плата.
Расчет основной заработной платы приведен в таблице 6.2
Таблица 6.2
Расчет основной заработной платы научно производственного персонала
| Исполнители | Количество | Время работы в году, дней. | Средняя заработная плата в ден., тыс. руб. | Сумма основной зарплаты, тыс. руб. |
| Научный сотрудник | 1 | 6 | 10 | 60 |
| Инженер | 2 | 6 | 6,6 | 80 |
| Лаборант | 1 | 6 | 4 | 24 |
| Всего | 164 | |||
Дополнительная заработная плата.
Принимаем дополнительную зарплату в размере 15% от основной:
Зд = Зо * 0,15 = 24600 руб.
4. Основная и дополнительная заработная плата прочих категорий работников.
Зпк = ( Зо + Зд ) * Кпк , (6.6)
где Кпк = 0.5 - норматив выплат
Зпк = ( 164000 + 24600 ) * 0,5 = 94300 руб.
5. Отчисления в фонд социальной защиты населения.
Отчисления в фонд социальной защиты населения и в фонд занятости:
Рсоц = ( Зо + Зд ) * Нсоц / 100 (6.7)
где Нсоц = 35 % + 1 % = 36 % - норматив выплат органам социальной защиты и в фонд занятости.
Рсоц = (164000 + 24600) * 0,36 = 67896 руб.
Командировочные расходы.
Рком = Зо * 0,1 = 16400 руб.
Услуги сторонних организаций.
Затраты на услуги сторонних организаций равны нулю, так как никаких договоров с ними не заключается.
Прочие расходы.
Рпр = ( Зо + Зд + Зпк + Рм + Рсоц + Рком ) * Нпр / 100, (6.8)
где Нпр = 10% - норматив выплат.
Рпр = (164000+24600+94300+17430+67896+16400)*0,1=38463 руб.
Накладные расходы.
Накладные расходы - принимаем в размере 150% от основной заработной платы:
Рнак = Зо * 150 / 100 = 164000 * 150 / 100 = 246000 руб.
Расчет сметной стоимости НИОКР сведен в таблицу 6.3
Таблица 6.3Смета затрат и договорная цена разработки
| Статьи затрат | Сумма, руб. | Методы расчета и исходная информация |
| 1 | 2 | 3 |
| 1. Материалы и комплектующие изделия | 17430 | Таблица 5.1 |
| 2. Спецоборудование | 0 | (не требуется) |
|
3. Расходы на оплату труда 3.1 Основная зарплата 3.2 Дополнительная зарплата |
164000 24600 |
Таблица 5.2 15% от Зо |
| 4. Основная и дополнительная зарплата прочих категорий работников | 94300 | ( Зо + Зд ) * 0,5 |
| 5. Отчисления в фонд социальной защиты населения | 67896 | Рсоц |
| 6. Командировочные расходы | 16400 | 10% от Зо |
| 7. Услуги сторонних организаций | 0 | (не требуются) |
| 8. Прочие расходы | 38463 | Рпр=(Зо+Зд+Зпк+Рм+Рсоц+Рком)*0.1 |
| 9. Накладные расходы | 246000 | 150% от Зо |
| 10. Итого себестоимость | 630626 | сумма |
| 11. Отчисления в спецфонды | 6468 | Осф=(Сп+2,5)/(100-2,5 ) |
| 12. Отчисления производителям с/х продукции | 9702 | (Сп+Осф)*1.5/(100-1.5) |
| 13. Отпускная цена | 646796 | п.10 + п.11 + п.12 |
6.3.2 Расчет единовременных затрат
Капитальные вложения в сфере производства новой техники определяются следующим образом:
Кпф = Цоб + Ктр + Кзд + Км + Кос + Коф + Кпр, (6.9)
где Цоб - цена оборудования, необходимого для изготовления новой техники, руб.;
Ктр - затраты на транспортировку приобретаемого оборудования, руб.;
Км - затраты на монтаж оборудования, руб.;
Кзд - затраты на строительство зданий, сооружений, связанное с изготовлением новой техники, или стоимость производственной площади, руб.;
Кос - затраты на пополнение оборотных средств, руб.;
Коф - балансовая стоимость действующих основных фондов, непосредственно связанных с изготовлением проектируемого изделия, руб.;
Кпр - прочие капитальные вложения, связанные с предотвращением отрицательных социальных, экономических и других последствий;
Производство систем является мелкосерийным (выпуск 300 штук в год). На выпуск одной при этом достаточно трех дней (1 - на пайку и 2 - на сборку и наладку). Следовательно, большую часть времени в году используемое оборудование (10 монтажных столов и 10 стульев) будет простаивать. Поэтому строить целое здание и покупать производственное оборудование экономически не целесообразно. Выгоднее арендовать производственную площадь, где это оборудование уже установлено.
Тогда арендная плата за используемые площади:
Aпл = На * Sоб * Ku * Т, (6.10)
где На = 3000 руб. - стоимость аренды одного квадратного метра производственной площади в месяц;
Sоб = 40 м.кв. - площадь, занимаемая оборудованием;
Ku –коэффициент использования оборудования для производства изделия;
Т = 12 месяцев.
Апл =3000 * 40 * 12 * 0,4 = 576000 руб.
Арендная плата за оборудования;
Аоб=Ст, об*0,15=980000*0,15=147000 руб.
Где Ст. об=980000 руб. стоимость использования оборудования.
6.4 Расчет стоимостной оценки результата
6.4.1 Определение себестоимости товара и рыночной цены
Одним из важнейших показателей, характеризующих изделие как объект производства, является его себестоимость. Она включает сумму затрат в сфере производства на его изготовление и реализацию. Расчет себестоимости единицы проектируемой техники производится по всем статьям затрат в соответствии с [12].
Расчет затрат на комплектующие изделия и покупные полуфабрикаты сведен в таблицу 6.4.
Таблица 6.4
Расчет затрат на комплектующие и покупные полуфабрикаты
| Наименование | Един. изм. | Кол-во | Цена, руб. | Сумма |
| 1 | 2 | 3 | 4 | 5 |
| PIC-контроллер | шт. | 1 | 1690,5 | 1690,5 |
| Транзисторы | шт. | 5 | 35 | 175 |
| Микросхемы 564 ЛН 1 | шт. | 2 | 52,5 | 105 |
| Резисторы С2-93Н-0,125 | шт. | 60 | 3,5 | 420 |
| Конденсаторы К-73-17 | шт. | 33 | 35 | 1155 |
| Конденсаторы К53-21 | шт. | 13 | 35 | 455 |
| Диоды КД522Г | шт. | 7 | 17,5 | 122,5 |
| Стабилитроны КС 521Г | шт. | 2 | 17,5 | 35 |
| Печатная плата односторонняя | шт. | 1 | 1400 | 1400 |
| Трансформатор ВЧ | шт. | 1 | 600 | 600 |
| Коаксиальный провод | м. | 200 | 12 | 2400 |
| Корпус | шт. | 1 | 5000 | 5000 |
| Итого стоимость материалов для одного устройства | 11055 | |||
| Транспортно-заготовительные расходы (5 %) | 553 | |||
| Всего | 11608 | |||
Расчет затрат на сырье и материалы сведен в таблицу 6.5
Таблица 6.5
Расчет затрат на сырье и материалы за вычетом реализуемых отходов
| № | Наименование материала | Единицы измерения | Норма расхода | Цена за единицу, руб. | Сумма, руб. |
| 1 | Припой ПОС - 61 | Кг | 0,15 | 5000 | 750 |
| 2 | Канифоль | Кг | 0,05 | 2000 | 100 |
| 3 | Флюс | Кг | 0,05 | 6000 | 300 |
| 4 | Монтажный провод | М | 1 | 1000 | 1000 |
| Итого | 2150 | ||||
| Транспортно-заготови-тельные расходы (5%) | 108 | ||||
| Всего затрат | 2258 | ||||
| Возвратные отходы (1% от всех затрат) | 23 | ||||
| Всего с учетом возвратных отходов | 2281 |
Расчет затрат по статье ''Основная заработная плата производственных рабочих'' сведен в таблицу 6.6
Таблица 6.6
Расшифровка основной заработной платы производственных рабочих по видам работ
| № | Виды работ (операция) | Разряд работ | Часовая тарифная ставка, руб./ч. | Норма времени по опе-рации, ч. | Основная зарплата (расценка), руб. |
| 1 | Радиомонтаж | 4 | 30 | 4 | 120 |
| 2 | Сборка | 3 | 25 | 3 | 75 |
| 3 | Испытание и регулировка | 6 | 40 | 4 | 160 |
| Итого | 355 | ||||
| Премия 40% | 142 | ||||
| Всего с премией | 497 |
Выше рассчитаны прямые статьи затрат. Косвенные статьи затрат рассчитываются по нормативам, установленным в процентах либо к основной зарплате производственных рабочих, либо к производственной себестоимости продукции.
Дополнительная зарплата основных производственных рабочих
Зд = Зо * Нд / 100 , (6.11)
где Нд = 20 % - процент дополнительной зарплаты.
Зд = 497 * 20 / 100 = 99 руб.
Основная и дополнительная зарплата прочих категорий работников
Зпк = ( Зо + Зд ) * Кпк, (6.12)
Где Кпк = 0,5 - расчетный коэффициент.
Зпк = ( 497 + 99 ) * 0,5 = 298 руб.
Отчисления органам социальной защиты и в фонд занятости
Рсоц = ( Зо + Зд ) * Нсоц / 100, (6.13)
где Нсоц = 35 % + 1 % = 36 % - норматив выплат органам социальной защиты и в фонд занятости.
Рсоц = ( 497 + 99 ) * 36 / 100 = 215 руб.
Чрезвычайный чернобыльский налог
Рчн = ( Зо + Зд ) * Нчн / 100, (6.14)
где Нчн = 4% - норматив выплат по чернобыльскому налогу.
Рчн = ( 497 + 99 ) * 4 / 100 = 24 руб.
Отчисления на износ инструментов и приспособлений целевого назначения
Риз = Зо * Низ / 100, (6.15)
где Низ = 10% - норматив выплат
Риз = 497 * 10 / 100 = 50 руб.
Общепроизводственные расходы
Робп = Зо * Нобп / 100, (6.16)
где Нобп = 130% - норматив выплат
Робп = 497 * 130 / 100 = 646 руб.
Общехозяйственные расходы
Робх = Зо * Нобх / 100, (6.17)
где Нобх = 150% - норматив выплат
Робх = 497 * 150 / 100 = 746 руб.
Прочие производственные расходы
Рпр = Зо * Нпр / 100, (6.18)
где Нпр = 2% - норматив выплат
Рпр = 497 * 2 / 100 = 10 руб.
Итого производственная себестоимость
Спр = Рм + Рк + Зо + Зд + Зпк + Рсоц + Рчн + Риз + Робп + Робх + Рпр (6.19)
Спр = 2281 + 11608 + 497 + 99 + 298 + 215 + 24 + 50 + 646 + 746 + 10 = 16474 руб.
Коммерческие расходы
Рком = Спр * Нком / 100, (6.20)
где Нком = 2% - норматив выплат
Рком = 16474 * 2 / 100 = 329 руб.
Итого полная себестоимость
Сп = Спр + Рком, (6.21)
Сп = 16474 + 329 = 16803 руб.
Плановая прибыль на единицу продукции, которая должна покрыть как себестоимость, так и удельные единовременные затраты.
Пед = Сп * Нре / 100, (6.22)
Где Нре = 40% - уровень рентабельности изделия.
Пед = 16803 * 40 / 100 = 6721 руб.
Оптовая цена предприятия
Цопт = Сп + Пед (6.23)
Цопт = 16803 + 6721 = 23524 руб.
Амортизационные отчисления на полное восстановление ОПФ предприятия:
Ао = Нао * Зо / 100, (6.25)
где Нао - процент Ао , который принимаем равным 12%.
Ао = 12 * 497 / 100 = 60 руб.
Отчисления в спецфонды (сельхозналог, отчисления в ведомственный жилой фонд, на содержание детских дошкольных учреждений)
Осф = (Сп + Пед )* Нсф / ( 100 - Нсф ), (6.27)
где Нсф = 2,5% - процент отчислений.
Осф = (16803+ 6721) * 2,5 / (100-2,5) = 603 руб.
Отчисления на поддержание производителей сельхозпродукции
Ос/х = (Сп + Пед )* Нс/х / ( 100 - Нс/х ), (6.28)
где Нс/х = 1,5% - процент отчислений.
Ос/х =(16803+ 6721) * 1,5 / (100-1,5) = 358 руб.
Налог на добавленную стоимость
Рдс=(Сп+Пед+Осф+Ос/х)*Ндс/100 (6.29)
где Ндс=20%,
Рдс=(16803+6721+603+358)*20/100=4897 руб.
Свободная (договорная) отпускная цена
Ц = Сп + Пед + Рдс + Осф + Ос/х (6.30)
Ц = 16803+6721+4897+603+358 = 29382 руб.
6.4.2 Расчет чистой прибыли от внедрения проекта
Считаем, что себестоимость и отпускная цена изделия остаются постоянными в течении всего расчетного периода. Косвенный налог, включаемый в цену изделия
Оt = Рдс + Осф + Ос/х, (6.31)
Где Рдс = 4897 руб. - НДС;
Осф =603 руб. - отчисления в спецфонды;
Ос/х = 358 руб. - отчисления на поддержание производителей сельхозпродукции.
Оt = 4897+603+358 = 5858 руб.
Следовательно, прибыль, остающаяся в распоряжение предприятия
Пt = ( Цt - Сп - Оt ) * Nt * ( 1 - Ht / 100), (6.32)
где Нt = 25% - процент налога на прибыль.
Пt = (28242-16803- 5858) * 300 * (1-25/100) = 1255725 руб.
Считаем, что НИОКР будут проведены в 2000 году. В этом же году планируется начать выпуск изделий. Поэтому коэффициент приведения в 2000 - м году принимаем равным 1, а в последующие годы рассчитываем по формуле (6.2):
ά (2000) = 1;
ά (2001) = 0,83;
ά (2002) = 0,69;
Результаты расчета чистой прибыли сведены в таблицу 6.7
Таблица 6.7
Расчет чистой прибыли от внедрения проекта
| Показатели | Единицы измерения | 2000 | 2001 | 2002 |
| Объем производства | шт. | 300 | 300 | 300 |
| Прогнозируемая цена | руб. | 29382 | 29382 | 29382 |
| Чистая прибыль | руб. | 1255725 | 1255725 | 1255725 |
| То же приведенное к 2000 году | руб. | 1255725 | 1042252 | 866450 |
| Коэффициент приведения | 1 | 0,83 | 0,69 |
6.5 Расчет экономического эффекта
На основе расчетов, приведенных ранее, определяется целесообразность внедрения инженерного проекта. Определение экономического эффекта приведено в таблице 6.8
Таблица 6.8
Расчет экономического эффекта
| Показатели | Един. измер. | Расчетный период | ||
| 2000 | 2001 | 2002 | ||
| 1 | 2 | 3 | 4 | 5 |
|
Результат: 1. Прогнозный объём производства |
шт. | 300 | 300 | 300 |
| 2. Прогнозная цена | руб. | 29382 | 29382 | 29382 |
| 3. Себестоимость единицы продукции | руб. | 16803 | 16803 | 16803 |
| 4. Чистая прибыль от внедрения | руб. | 1255725 | 1255725 | 1255725 |
| 5. То же с учетом фактора времени | руб. | 1255725 | 1042252 | 866450 |
|
Затраты: 6. Предпроизводственные затраты |
руб. | 646796 | - | - |
| 7. Арендная плата за оборудование и помещение | руб. | 723000 | 723000 | 723000 |
| 8. Затраты на рек-ламу (прогнозная величина) | руб. | - | - | - |
| 9. Всего затрат | руб. | 1369796 | 723000 | 723000 |
| 10. То же с учетом фактора времени | руб. | 1369796 | 600090 | 498870 |
|
Эконом. Эффект 11. Превышение результата над затратами |
руб. | -114071 | 442162 | 367580 |
| 12. То же нарас-тающим итогом | руб. | -1985771 | 366994 | 253630 |
| 13. Коэффициент приведения | руб. | 1 | 0,83 | 0,69 |
6.6 Определение срока окупаемости и рентабельности проекта
Срок окупаемости проекта Соп найдем, разделив сумму затрат на приведенную величину прибыли за первый расчетный год:
Соп = 1369796 /1255725 = 1,09 года.
7. Охрана труда и экологическая безопасность
7.1 Проектирование и расчет естественного освещения, как фактор энергосбережения
Рациональное освещение производственных помещений и рабочих мест является одним из важнейших факторов создания благоприятных гигиенических условий труда, повышающих культуру производства, способствующих повышению производительности труда и качества выпускаемой продукции, а также снижению производственного травматизма.
При хорошем освещении устраняется напряжение глаз, облегчается различение деталей обрабатываемых, монтируемых или наблюдаемых объектов, расчёт производительности труда. Недостаточная освещенность рабочей зоны, а также повышение яркости света затрудняют восприятие зрительной информации, создают предпосылки к травмированию человека. Недостаточное освещение и пониженная контрастность при малых объектах различения заставляют работающих напрягать зрение, что может привести к профессиональной болезни – прогрессирующей близорукости. С целью обеспечения нормальных условий труда и защиты зрения человека в производственных помещениях должно устраиваться освещение, отвечающее требованиям соответствующих норм и правил.
И так естественное освещение – это освещение создаваемое прямыми солнечными лучами и диффузным светом небесного излучения.
Учитывая высокую биологическую и гигиеническую ценность и положительное воздействие естественного освещения, следует стремиться к максимально возможному его использованию. Естественное освещение обеспечивает зрительный контакт с внешней средой; изменения естественного света устраняют монотонность световой обстановки в помещениях, вызывающую преждевременное утомление нервной системы.
Естественное освещение характеризуется непостоянством во времени и подвержено колебаниям в зависимости от состояния наружной освещенности, расстояния рабочего места от световых проемов окон, их светопропускания и других факторов. Поэтому естественная освещенность оценивается относительной величиной - коэффициентом естественной освещенности (к.е.о.) Коэффициент естественной освещенности в любой точке внутри помещения определяется по формуле
![]() *100%, (7.1)
*100%, (7.1)
где Ев – освещенность в любой точке внутри помещения, освещаемой видимым участком небосвода;
Ен – одновременно измеренная освещенность наружной горизонтальной плоскости, освещаемой рассеянным светом всего небосвода.
Нормируемое значение коэффициента естественной освещенности ен определяется с учётом не только характера работ, но и коэффициентом светового климата m и солнечности климата с по формуле
ен=m*e*c,% (7.2)
где e – значение к.е.о., % при рассеянном свете от небосвода; m=0,8-1,2. Величина m зависит от района расположения здания. Для нашей местности m=1,0, с=0,65-1,0.
К освещению рабочих кабинетов ставятся следующие требования:
создание необходимых условий освещения на рабочих столах, расположенных в глубине помещений при выполнении разнообразных зрительных работ;
обеспечение зрительной связи с наружным пространством;
защита помещений от слепящего и теплового действия инсоляции;
4. благоприятное распределение яркости в поле зрения.
Боковое естественное освещение рабочего кабинета осуществляться отдельным световым проёмам (одно окно на каждый кабинет). С целью снижения необходимой площади светового проема высота подоконника над уровнем пола принята 1.2 м.
Работу лаборанта в этом помещении относим ко второй категории тяжести работ, которая выполняется в условиях, допустимых концентрации вредных веществ и уровней производственных факторов, не превышающих требованиям правил и норм. В обязанности лаборанта входит контроль, за правильностью выполнения всех поставленных перед стендом работ, а так же установка и замена испытуемых РПУ. Работает лаборант стоя, поэтому особые требования представляют к организации рабочего места за стендом и режиму работы, которые в значительной степени влияют на здоровье и работоспособность. Кроме того, учитывая напряжённость зрительной работы (больше 90% рабочего времени зрительной работы) мы более подробно оценим освещённость рабочего места лаборанта. Для этого рассмотрим рабочий кабинет и рабочее место лаборанта.
На рис. 7.1. представлен план и разрез рабочего кабинета.
Оценим естественное освещение рабочего кабинета.
И так, требуется определить КЕО в рабочем кабинете, расположенного в городе Минске.
Для этого расчёта за исходные данные принято:
- глубина помещения 6,0м,
высота 3,0 м,
длина 3,0 м,
площадь 18,0 м2,
оконный блок 1,8*2,1м;
заполнение световых проёмов осуществлено остеклением по спаренным алюминиевым переплётам;
коэффициент отражения потолка r=0,6; стен r=0,4; пола r=0,25
затемнение противостоящими зданиями отсутствует.
созданы необходимые условия освещённости на рабочих столах, расположенных в глубине помещения;
защищён пункт от слепящего и теплового действия инсоляции шторами;
для обеспечения зрительного контакта с наружным пространством заполнение световых проёмов выполнено из светопрозрачного оконного стекла;
естественное освещение в рабочем помещении боковое, одностороннее.
Решение:
При боковом естественном освещении нормируется минимальное значение КЕО в точке, расположенной на расстоянии 1м от стены , наиболее удалённой от световых проёмов, на пересечении вертикальной плоскости характерного разреза помещения и условной рабочей поверхностью. Так как в помещении боковое освещение, то неровнамерность естественного освещения не нормируется.
Производим расчёт КЕО в точке М рис. 7.1. в соответствии со СНиП 2-4-79 по формуле
 , (7.3)
, (7.3)
Поскольку противостоящих зданий нет, то Езд=0.
Накладываем график 1 для расчёта коэффициента естественной освещённости методом А.М.Данилюка на поперечный разрез помещения рис. 7.1. , совмещая полюс графика с точкой М, а линию с условной рабочей поверхностью, и подсчитываем колличесто лучей по графику I, проходящих через поперечный разрез светового проёма n1=2.96.
Отмечаем, что через точку С на разрезе помещения проходит концентрическая полуокружность 26 графика 1.
Накладываем график 2 для расчёта методом А.М.Данилюка на план помещения (рис.7.1.) таким образом, что бы его вертикальная ось и горизонталь 26 проходила через точку С; подсчитаем по графику 2 количество лучей, проходящих от неба через световой проём, n2=24.
Определяем значение геометрического КЕО по формуле
![]() , (7.4)
, (7.4)
На поперечном разрезе помещения (М1:100) определяем, что серидина участка неба, находится под углом q=110; по значению угла q по СНиП 2-4-79 линейной интерполяцией находим коэффициент, учитывающий неравномерную яркость облачного неба МКО, q==0.59.
По размерам помещения и
светового проёма находим, что 
 ,
,![]() =0.51. (7.5)
=0.51. (7.5)
Находим площади поверхностей потолка Апт , стен Аст, и пола Ап и определяем средневзвешенный коэффициент отражения по формуле
 =0,41. (7.6)
=0,41. (7.6)
По найденным значениям ![]() ,
, ![]() ,
, ![]() в СНиП 2-4-79
линейной интерполяции находим, что r1=2.55.
в СНиП 2-4-79
линейной интерполяции находим, что r1=2.55.
10.Для спаренного алюминеего переплёта с двойным остеклением находим общий коэффициент светопропускания
![]() . (7.7)
. (7.7)
11. Определям по СНиП 2-4-79, что коэффициент запаса для окон общественных зданий Кз=1.2,
12. Определяем КЕО в точке
М, подставляя значения коэффициентов ![]() , q, r1,
, q, r1, ![]() , К3 в формулу:
, К3 в формулу:
 (7.8)
(7.8)
Отсюда можно сделать вывод, что размеры светового проёма обеспечивают требования норм по естественному освещению рабочего кабинета.
Заключение
В ходе дипломного проектирования был разработан однокритериальный измеритель частотной избирательности, который обеспечивает возможность комплексного экспресс-анализа восприимчивости и электромагнитной совместимости радиоэлектронной аппаратуры методом двухчастотного зондирования в реальном масштабе времени. При разработке применялась современная элементная база, которая позволяет понизить энергопотребление при работе системы.
Для отладки управляющей программы использовался программный пакет фирмы Microchip. Он позволяет разрабатывать программное обеспечение для широкого спектра микроконтроллеров этой фирмы. При разработке программы учитывалась возможность применения вместо PIC 16С73А микроконтроллеры аналогичной структуры, но не имеющие на кристалле энергонезависимой памяти (эти изделия более дешевые). Кроме того в ходе дипломного проектирования освещены вопросы охраны труда и сделано технико-экономическое обоснование дипломного проекта.
В заключение заметим, что результаты измерений предлагаемым методом однокритериальной оценки частотной избирательности РПр наглядны, легко сравнимы для радиоприемников одного класса, и монотонно связаны с его качеством, что может быть с успехом использовано при проведении приемно-сдаточных испытаний РПрУ, при их производстве, техническом обслуживании и в процессе ремонтно-восстановительных работ.
Список литературы
1. Виноградов Е. М., Винокуров В.И., Харченко И.П. Электромагнитная совместимость радиоэлектронных средств. – Л.: Судостроение, 1986. -264 с.
2. Апорович А.Ф. Проектирование радиотехнических систем. –Минск. Высшая школа 1988г.
3. Уайт Д. Электромагнитная совместимость радиоэлектронных средств и непредномеренных помех.-М: Сов. Радио, 1977.- Вып. 1.-352 с.
4. ГОСТ 23611-79. Совместимость радиоэлектронных средств. Электромагнитная. Термины и определения.
5. Апорович А. Ф. Статистическая теория электромагнитной совместимости радиоэлектронных средств. -Мн.: Наука и техника, 1984. - 215 с.
6. Голубев В.Н. Эффективная избирательность радиоприёмных устройств. -М.: Связь, 1978.
7. А. С. 953582 СССР МКИ G 01 R3/00. Устройство для измерения частоты в каналах приёмника/ А. Ф. Апорович, Г. В. Кизевич, В. Н. Левкович, В. И. Мордачёв, В. Г. Устименко.
8. Бапалов А. Л., Михайлов А. С. Нормы на параметры электромагнитной совместимости РЭС: Справочник. – М.: Радио и связь. 1990. –272 с.
9. Апорович А.Ф., Мордачёв В.И. Функциональные возможности контроля характеристик ЭМС радиоэлектронной аппаратуры методом двухчастотного зондирования // Труды 9-го международного симпозиума по ЭМС. – Ч.2.-Вроцлав, 1988. – с.867 –871.
10. Захарченко К.А. Однокритериальная оценка двухсигнальной частотной избирательности радиоприёмника // Радиотехника и Электроника. – Мн.: Вышейшая школа, 1990, - вып.19,с.54-57.
11. А.с №1632336. Устройство контроля восприимчивости радиоприёмника к помехам / Апорович А.Ф., Захарченко Г.А. /. Зарегистрировано в Гос. Реестре изобретений СССР 01.11.90г.
12. Методики выполнения измерений параметров и характеристик электромагнитной совместимости радиоприёмников методом двухчастотного зондирования. Рекомендованы к применению решением Государственной комиссии по радиочастотам (ГКРЧ) СССР от 26 февраля 1990 года.
13. Л.И. Биберман. Широкодиапазонные генераторы на негатронах. – М.: Радио и связь, 1982. – 88 с., ил.
14. Богданович Б.М. Нелинейные искажения в приёмно-усилительных устройствах. – М.: Связь, 1980. – 280 с., ил.
15. Панин Н.М. Переменные аттенюаторы и их применение. – М.: Энергия, 1971.
16. Альтшуллер Г.Б. Управление частотой кварцевых генераторов. – М. Связь 1969г., с. 454.
17. Богданович Б.М., Ваксер Э.Б. Проектирование элементов радиоприёмных устройств. – Мн.: Выш. Школа, 1979. – 192 с., ил.
18. Айзенберг. Антенны УКВ.– М.:Связь, 1997.
19. Чёрный. Распространение радиоволн.– Сов. Радио, 1962.
20. ГОСТ 15150-69. Машины, приборы и другие технические изделия. Исполнения для различных климатических районов. Категории, условия эксплуатации, хранения и транспортирования в части воздействия климатических факторов внешней среды.
21. ГОСТ 12.2.006-87. Безопасность аппаратуры электронной сетевой и сходных с ней устройств, предназначенных для бытового и аналогичного общего применения. Общие требования и методы испытаний.
22. ГОСТ 23511-79. Радиопомехи индустриальные от электротехнических устройств, эксплуатируемых в жилых домах или подключаемых к их электрическим сетям, нормы и методы измерений.
23. ГОСТ 16842-82. Радиопомехи индустриальные. Методы испытаний источников индустриальных радиопомех.
24. ГОСТ 9.301-86. Покрытия металлические и неметаллические неорганические. Общие требования.
25. ГОСТ 9.302-88. Покрытия металлические и неметаллические неорганические. Методы контроля.
26. РД 4.005.052-89. Правила оформления временных разрешений в процессе производства.
27. РД 107.9.4002-88. Покрытия лакокрасочные. Номенклатура, свойства и область применения.
28. ГОСТ 24297-87. Входной контроль продукции. Основные положения.
29. ГОСТ 29037-91. Совместимость технических средств электромагнитная. Сертификационные испытания. Общие положения.
30. ГОСТ 23585-79 (ГОСТ 23587-79). Монтаж электрический радиоэлектронной аппаратуры и приборов.
31. ГОСТ 23588-79 (ГОСТ 23594-79). Монтаж электрический радиоэлектронной аппаратуры и приборов.
32. ГОСТ 2.144-70. Правила построения ,изложения и оформления.
33. ГОСТ 2.601-68. ЕСКД. Эксплуатационные документы.
34. ОСТ 4ГО.054.205. Покрытия лакокрасочные. Типовые технологические процессы.
35. ГОСТ 12997-84. Изделия ГСП. Общие технические условия.
36. ГОСТ 27.410-87. Надежность в технике. Методы контроля показателей надежности и планы контрольных испытаний на надежность.
37. ГОСТ 29280-92 (МЭК 1000-4-92). Совместимость технических средств электромагнитная. Испытания на помехоустойчивость. Общие положения.
38. ГОСТ 9.014-78. Временная противокоррозионная защита изделий Общие требования.
39. ГОСТ 27570.0-87. Безопасность бытовых и аналогичных электроприборов. Общие требования и методы испытаний.
40. ГОСТ 24555-81. Порядок аттестации испытательного оборудования
41. Санитарные правила и нормы N 11-13-94. Санитарные нормы микроклимата производственных помещений. Мн. РБ. 1994.
42. Пособие по расчёту и проектированию естественного, искусственного и совмещённого освещения. – М.: Стройиздат, 1985.
43. Методическое пособие по курсу « Охрана труда» по теме «Организация производственного освещения» Р.С. Шакиров, Т.Ф. Михнюк: - Мн. МРТИ, 1980г.
44. СНиП 2-4-79. Естественное и искусственное освещение. – М.: Стройиздат,1980