Рефераты по авиации и космонавтике
Рефераты по административному праву
Рефераты по безопасности жизнедеятельности
Рефераты по арбитражному процессу
Рефераты по архитектуре
Рефераты по астрономии
Рефераты по банковскому делу
Рефераты по сексологии
Рефераты по информатике программированию
Рефераты по биологии
Рефераты по экономике
Рефераты по москвоведению
Рефераты по экологии
Краткое содержание произведений
Рефераты по физкультуре и спорту
Топики по английскому языку
Рефераты по математике
Рефераты по музыке
Остальные рефераты
Рефераты по биржевому делу
Рефераты по ботанике и сельскому хозяйству
Рефераты по бухгалтерскому учету и аудиту
Рефераты по валютным отношениям
Рефераты по ветеринарии
Рефераты для военной кафедры
Рефераты по географии
Рефераты по геодезии
Рефераты по геологии
Рефераты по геополитике
Рефераты по государству и праву
Рефераты по гражданскому праву и процессу
Рефераты по кредитованию
Рефераты по естествознанию
Рефераты по истории техники
Рефераты по журналистике
Рефераты по зоологии
Рефераты по инвестициям
Рефераты по информатике
Исторические личности
Рефераты по кибернетике
Рефераты по коммуникации и связи
Рефераты по косметологии
Рефераты по криминалистике
Рефераты по криминологии
Рефераты по науке и технике
Рефераты по кулинарии
Рефераты по культурологии
Дипломная работа: Проектирование цифрового регулятора для электропривода с фазовой синхронизацией
Дипломная работа: Проектирование цифрового регулятора для электропривода с фазовой синхронизацией
Техническое задание на проектирование цифрового регулятора для электропривода с фазовой синхронизацией
1. Область применения
Цифровой регулятор используется для построения электропривода с фазовой синхронизацией, работающего в области низких частот вращения.
2. Назначение
Цифровой регулятор предназначен для демодуляции выходного сигнала логического устройства сравнения и формирования сигнала управления электродвигателем.
3. Технические требования
3.1 Требования к электроприводу:
· диапазон частот вращения 10-100 об/мин;
· угловая погрешность синхронного режима не более 5 угл. мин;
· минимальное время выхода электропривода на синхронно-синфазный режим;
· минимальные массогабаритные показатели.
Реферат
Количество:
| страниц | 86 |
| иллюстраций | 37 |
| таблиц | 11 |
| источников литературы | 27 |
Ключевые слова: бесконтактный двигатель, электропривод, синфазный, синхронизация, логическое устройство сравнения, корректирующие устройство, цифровой регулятор, Z-преобразование.
При выполнении настоящего дипломного проекта разработан цифровой регулятор для электропривода с фазовой синхронизацией, удовлетворяющего поставленным требованиям по диапазону частот вращения и точности стабилизации угловой скорости. Проведено моделирование электропривода с разработанным регулятором в программном пакете MatLab 7.01, исследована его динамика.
Разделы пояснительной записки:
1. Обзор литературы.
2. Выбор структуры и расчет параметров регулятора.
3. Выбор структуры и расчет параметров системы управления электропривода.
4. Разработка принципиальной электрической схемы корректирующего устройства.
5. Экономический расчет.
6. Охрана труда.
DAS REFERAT
Quantity:
| Pages | 86 |
| Illustrations | 37 |
| Table | 11 |
| Sourcesof the literature | 27 |
Key words: the contactless engine, the electric drive, inphase, synchronization, the logic device the comparisons adjusting the device, a digital regulator, Z-transformation.
At performance of the present degree project the digital regulator for the electric drive with the phase synchronization, satisfying the put requirements on a range of frequencies of rotation and accuracy of stabilization of angular speed is developed. Modelling the electric drive with the developed regulator in software package MatLab 7.01 is lead, his dynamics is investigated.
Sections of an explanatory note:
1. The review of the literature.
2. A choice of structure and calculation of parameters of a regulator.
3. A choice of structure and calculation of parameters of a control system of the electric drive.
4. Development of the basic electric circuit of the adjusting device.
5. Economic calculation.
6. A labour safety.
Содержание
Введение
1. Обзор литературы
1.1 Структура электропривода с фазовой синхронизацией
1.2 Составные части электропривода с фазовой синхронизацией
1.3 Модели электропривода с фазовой синхронизацией
1.4 Основы теории цифровых систем управления
2. Выбор структуры и расчет параметров регулятора
2.1 Расчет линейного регулятора
2.2 Синтез передаточной функции цифрового регулятора
2.3 Проведение параметрической оптимизации коэффициентов цифрового регулятора
2.4 Анализ устойчивости системы
3. Разработка принципиальной электрической схемы корректирующего устройства
3.1 Разработка структурной схемы корректирующего устройства
3.2 Проектирование основных узлов корректирующего устройства
3.2.1 Генератор высокой частоты
3.2.2 Счетчик импульсов
3.2.3 Регистры РЕГ1 и РЕГ2
3.2.4 Вычислительное устройство
4. Экономический расчет
5. Охрана труда
5.1 Анализ опасных и вредных производственных факторов на рабочем месте оператора ЭВМ
5.1.1 Микроклимат
5.1.2 Освещение
5.1.3 Расчет искусственного освещения
5.1.4 Шум
5.1.5 Вибрация
5.1.6 Электробезопасность
5.1.7 Электромагнитное излучение
5.1.8 Эргономические возможности рабочего места
5.2 Противопожарная безопасность
Заключение
Список литературы
Приложения
Введение
Разработка новых эффективных технологических процессов, различных машин и приборов непосредственно связана с повышением требований к лежащим в их основе электроприводам по точности, быстродействию, согласованности вращений, снижению массы и габаритов. Отсутствие высокоэффективных электроприводов сдерживает в настоящее время возможности ряда отраслей техники, поэтому разработка новых, более совершенных систем электропривода становятся актуальной задачей.
Одной из основных тенденций, определяющих развитие электропривода в настоящее время, можно считать существенное усложнение выполняемых электроприводом функций и законов движения рабочих органов машин и механизмов при одновременном повышении требований к скорости и точности производимых электроприводом операций.
Возросла потребность в высокоточных электроприводах сканирования, нашедших широкое применение в системах зрения современных робототехнических комплексов, авиационном приборостроении, системах наведения и стабилизации скоростей перемещения астрономических и радионавигационных приборов, различных установках космической техники. В частности актуальной является проблема разработки электроприводов для обзорно-поисковых систем, осуществляющих автоматический обзор пространства в инфракрасном диапазоне спектра с целью получения информации о расположенных в нем объектах.
При построении высокоточных электроприводов, работающих в широком диапазоне регулирования частоты вращения, наиболее широкое применение нашли импульсные астатические системы электропривода с дискретным управлением. В таких системах используется принцип фазовой автоподстройки частоты вращения (ФАПЧВ), то есть осуществляется замыкание их по углу при малых рассогласованиях по угловой скорости с помощью логических устройств сравнения фаз двух последовательностей импульсов: эталонного источника и частотного датчика скорости. Электропривод, построенный на основе ФАПЧВ, обладает идеальным астатизмом по скорости, и в нем легко реализуется синфазный режим работы.
Электродвигатель в системе прецизионного электропривода должен обладать высокой стабильностью и надежностью работы, малой энергоемкостью габаритами. Перспективными в этом направлении являются бесконтактные двигатели постоянного тока, которые наиболее полно удовлетворяют требованиям, предъявляемым к управляемым двигателям систем автоматики по электромеханическим и энергетическим характеристикам, массогабаритным показателям, надежности и диапазону частот вращения в приделах от единиц до сотен тысяч оборотов в минуту.
В настоящие время разрабатываются системы прецизионного электропривода, с аналоговыми корректирующими устройствами, работающие на высоких частотах вращения. Это обусловлено тем, что в области высоких частот вращения частота сигнала ошибки высока и легко отфильтровывается фильтром, частота среза которого лежит за частотой среза системы. В области низких частот вращения, частота сигнал ошибки мала, и для фильтрации сигнала необходимо использовать фильтр с большой постоянной времени. В этом случае фильтр будет влиять на работу системы в целом. Поэтому в области низких частот вращения целесообразно использовать цифровое корректирующие устройство.
Таким образом, целью дипломного проекта ставится разработка цифрового регулятора для электропривода с фазовой синхронизацией, работающего на низких частотах вращения.
1. Обзор литературы 1.1 Структура электропривода с фазовой синхронизацией
Электропривод построенный на основе ФАПЧВ наиболее полно рассматривается в [1]. Структурная схема электропривода приведена на рисунке 1.1.
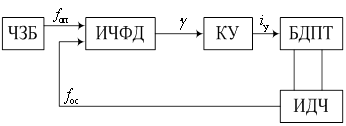
Рисунок 1.1 - Функциональная схема электропривода с фазовой синхронизацией.
здесь ЧЗБ - частотно-задающий блок, формирующий импульсы опорной частоты fоп;
ИДЧ - импульсный датчик частоты вращения, формирующий импульсы частоты обратной связи fос;
ЛУС - логическое устройство сравнения, осуществляющее сравнение частот и фаз двух импульсных последовательностей fоп и fос и формирующее в линейном режиме работы электропривода импульсный сигнал γ с периодом Топ=1/fоп и длительностью, пропорциональной фазовому сдвигу импульсов частот fоп и fос, а в режимах разгона или торможения - постоянный уровень напряжения соответствующей полярности;
КУ - корректирующее устройство (регулятор), необходимое для формирования корректирующего сигнала по периодическому закону;
БДПТ - бесконтактный двигатель постоянного тока.
Такие системы характеризуются высокими точностными показателями благодаря использованию фотоэлектрических ИДЧ с высокой разрешающей способностью, хорошими динамическими свойствами, широким диапазоном регулирования частоты вращения. Благодаря этим полезным свойствам принцип ФАПЧВ широко используется при построении прецизионных систем управления электродвигателями постоянного тока [2, 3], система синхронного-синфазного вращения и ряда других систем автоматического регулирования с высокими точностными показателями [4].
1.2 Составные части электропривода с фазовой синхронизацией
Рассмотрим подробнее составные части структурной схемы, приведенной на рисунке 1.1.
Логическое устройство сравнения.
Работа ЛУС [1] (рисунок 1.2 а) основа на логической обработке
порядка следования во времени импульсов двух входных сигналов: опорного с частотой
fоп и контролируемого с частотой fос. Выходной сигнал ЛУС γ в линейном
режиме работы электропривода (fоп ≈
fос) представляет собой последовательность
импульсов с периодом следования Топ и длительностью τ,
равной временному интервалу между импульсами частот fоп
и fос (рисунок 1.2 б, где ![]() ). В этом случае
среднее значение сигнала γ пропорционально фазовому рассогласованию
∆φ частот fоп и fос.
). В этом случае
среднее значение сигнала γ пропорционально фазовому рассогласованию
∆φ частот fоп и fос.
Под фазовым рассогласованием ∆φ подразумевается величина,
пропорциональная отношению ![]() . Значение фазового рассогласования
. Значение фазового рассогласования
![]() в зависимости
от τ может изменяться от 0 до 2π. При анализе процессов в электроприводе
с фазовой синхронизацией обычно используется нормированная величина фазового рассогласования
в зависимости
от τ может изменяться от 0 до 2π. При анализе процессов в электроприводе
с фазовой синхронизацией обычно используется нормированная величина фазового рассогласования
![]() , которая
при изменении τ от 0 до Топ увеличивается от минус
, которая
при изменении τ от 0 до Топ увеличивается от минус ![]() до
до ![]() .
.
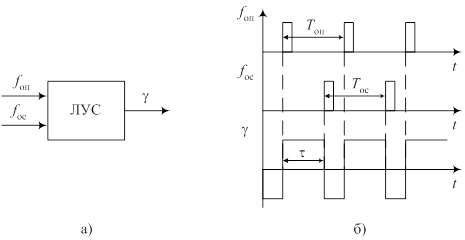
Рисунок 1.2 – Структурная схема и временные диаграммы ЛУС
При наличии частотного рассогласования ![]() сравниваемых сигналов fоп и fос
(режимы насыщения ЛУС) выходной сигнал логического устройства сравнения γ представляет
собой постоянный уровень напряжения (
сравниваемых сигналов fоп и fос
(режимы насыщения ЛУС) выходной сигнал логического устройства сравнения γ представляет
собой постоянный уровень напряжения (![]() при разгоне и
при разгоне и ![]() при торможении электродвигателя).
В результате в режиме фазового сравнения электропривода
при торможении электродвигателя).
В результате в режиме фазового сравнения электропривода ![]() , а в режимах разгона и торможения
электропривода
, а в режимах разгона и торможения
электропривода ![]() и
и ![]() соответственно.
соответственно.
В качестве логического устройства сравнения обычно используется импульсный частотно-фазовый дискриминатор (ИЧФД) [2], однако ЛУС может включать в себя дополнительные устройства (например, дополнительные частотные дискриминаторы, дополнительные генераторы импульсов или схемы предварительного преобразования входных импульсных частотных сигналов fоп и fос) и реализовать дополнительные функции [1].
Импульсный частотно-фазовый дискриминатор является основой для реализации ЛУС и может быть построен с использованием различных алгоритмов работы, которые различаются критериями равенства сравниваемых частот и функциональными возможностями ИЧФД [5].
Корректирующее устройство.
Корректирующее устройство [1] (рисунок 1.3) выполняется в виде последовательно соединенных демодулятора (ДМ) сигнала γ с выхода ЛУС и блока коррекции (БК), обеспечивающего устойчивость привода в заданном диапазоне рабочих частот вращения.
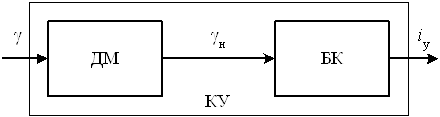
Рисунок 1.3 - Структурная схема корректирующего устройства.
Высокие точностные и массогабаритные показатели электропривода определяют ряд требований к реализации узлов корректирующего устройства:
1) работоспособность в широком диапазоне частот вращения,
2) высокая точность преобразования сигнала γ (при минимальной инерционности) и формирования корректирующих сигналов.
Импульсный датчик частоты.
В настоящее время налажено серийное производство фотоэлектрических ИДЧ с числом меток на оборот, достигающим 6000 - 16000 [12]. Высокая разрешающая способность ИДЧ при относительно простой технологии их изготовления позволяет в общем случае обеспечить устойчивость дискретно-фазового электропривода в широком диапазоне регулирования частоты вращения.
Основным измерительным звеном растровых датчиков угла, определяющим их точность, является растровый преобразователь перемещения, состоящих из двух круговых периодических шкал - растров.
Фотоэлектрический преобразователь с компенсацией оборотной погрешности от эксцентриситета представлен на рисунке 1.4 где К - компаратор, ФИ - формирователь импульсов. На подвижном и неподвижном модуляторах датчика дополнительно к радиальной наносится кольцевая растровая решетка с дополнительной фото-парой.
Радиальные растры служат для модуляции светового потока основного источника света при вращении вала датчика, и при одинаковых шагах растров и светосиле.
Кольцевые растры служат для модуляции светового потока дополнительной фото-пары, на входе которой формируется компенсирующий сигнал U2 [12].
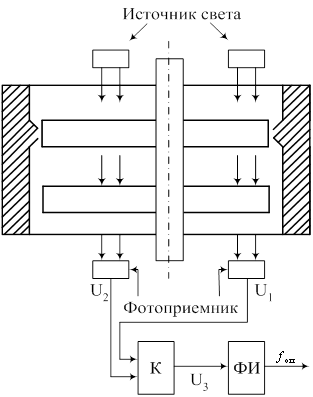
Рисунок 1.4 - Конструкция фотоэлектрического ИДЧ
Бесконтактный двигатель постоянного тока.
Принцип действия БДПТ сходен с принципом действия синхронного двигателя переменного тока [6].
Для уяснения особенностей, лежащих в основе процессов, обуславливающих создание знакопостоянного электромагнитного момента бесконтактного двигателя при любом положении его ротора, рассмотрим схему (рисунок 1.5).
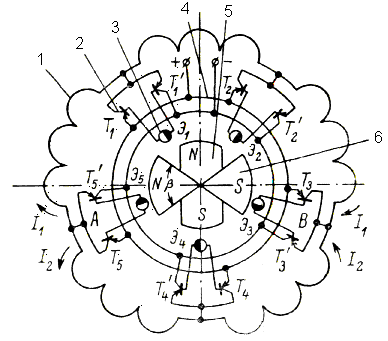
Рисунок 1.5 - Схема бесконтактного двигателя постоянного тока
Здесь якорная обмотка 1 неподвижна и расположена на статоре двигателя. Система коллекторных пластин и щеток в бесконтактном двигателе заменяется системой полупроводниковых ключей 2 (на схеме транзисторы Т1-Т5, Т1'-Т5'), управляемых чувствительными элементами 3 (Э1-Э5) в зависимости от положения ротора 5. Ключи 2 и чувствительные элементы 3 расположены неподвижно. Ротор бесконтактного двигателя имеет два сектора 6, образующих управляющий элемент датчика положения. Каждый из секторов в рассматриваемом случае имеет разноименнополюсную намагниченность (левый сектор имеет полярность N, а правый - S). При этом любой из чувствительных элементов Э в зависимости от полярности сектора 6, с которым он взаимодействует, выдает сигнал того или иного знака (на таком принципе работают, например, датчики Холла). Знак сигнала чувствительного элемента определяет срабатывание одного из пары ключей Т-Т', подсоединенных к шинам 4 источника питания. В частности, на рисунке 2, изображен момент, когда сектор N взаимодействует с чувствительным элементом Э5, а сектор S - с чувствительным элементом Э3. В этом положении сигнал чувствительного элемента Э5 отпирают ключ Т5, а сигнал чувствительного элемента Э3 отпирает ключ Т3'. Таким образом, выводы обмотки А и В оказываются подключенными через ключи Т5 и Т3' соответственно к положительной и отрицательной шине источника питания. Под действием поля, создаваемого обмоткой якоря ротор поворачивается, ключи Т5 и Т3' закрываются, так как на их датчики уже не действует поле секторов, и открывается следующая пара ключей. Таким образом, создается вращающееся магнитное поле, увлекающее за собой ротор двигателя
1.3 Модели электропривода с фазовой синхронизацией
Для построения структурной схемы электропривода с фазовой синхронизацией в [1] рассматриваются математические модели основных узлов электропривода с фазовой синхронизацией (рисунок 1.6, где ДМ - демодулятор выходного ШИМ-сигнала ИЧФД).
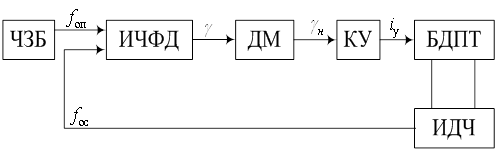
Рисунок 1.6 - Функциональная схема контура ФАПЧВ
В качестве модели импульсного частотно-фазового дискриминатора используется модель ИЧФД [1], приведенная на рисунке 1.7.
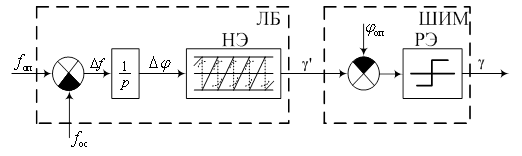
Рисунок 1.7 - Полная модель ИЧФД
Демодулятор, выделяющий непрерывный сигнал фазовой ошибки ![]() электропривода
из выходного ШИМ-сигнала γ импульсного частотно-фазового дискриминатора, обычно
выполняется в виде фильтра нижних частот (ФНЧ) [1] не менее второго порядка
электропривода
из выходного ШИМ-сигнала γ импульсного частотно-фазового дискриминатора, обычно
выполняется в виде фильтра нижних частот (ФНЧ) [1] не менее второго порядка ![]() (рисунок 1.8 а)
с постоянной времени
(рисунок 1.8 а)
с постоянной времени ![]() , где Топмах - максимальное
значение периода следования импульсов задающего частотного сигнала fос в заданном диапазоне рабочих частот вращения
электропривода, или дискретного преобразователя (рисунок 1.8 б, где Тос=1/fос) на основе схемы выборки-хранения (СВХ) [1].
, где Топмах - максимальное
значение периода следования импульсов задающего частотного сигнала fос в заданном диапазоне рабочих частот вращения
электропривода, или дискретного преобразователя (рисунок 1.8 б, где Тос=1/fос) на основе схемы выборки-хранения (СВХ) [1].
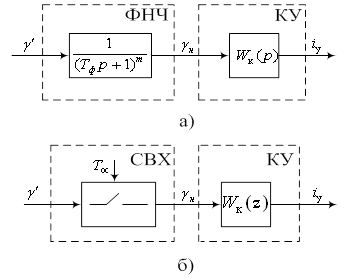
Рисунок 1.8 - Модели демодуляторов.
Благодаря демодуляции выходного сигнала импульсного частотно-фазового
дискриминатора обеспечивается качественная фильтрация выходного сигнала ИЧФД γ
и отсутствие высокочастотных пульсаций в управляющем сигнале ![]() , формируемом в соответствии
с передаточной функцией корректирующего устройства КУ
, формируемом в соответствии
с передаточной функцией корректирующего устройства КУ ![]() .
.
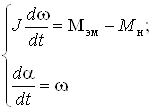
Модель БДПТ (при синусоидальной форме токов и их фазовом сдвиге
на ![]() в обмотках
электродвигателя) приведена на рисунке 1.9, где
в обмотках
электродвигателя) приведена на рисунке 1.9, где ![]() - максимальная величина потокосцепления
постоянных магнитов ротора с обмотками БДПТ,
- максимальная величина потокосцепления
постоянных магнитов ротора с обмотками БДПТ, ![]() - электромагнитный момент электродвигателя,
- электромагнитный момент электродвигателя,
![]() - момент нагрузки
на валу электродвигателя,
- момент нагрузки
на валу электродвигателя, ![]() - момент инерции ротора БДПТ с нагрузкой,
ε - угловая скорость, ω - угловая скорость. При этом при различных
способах демодуляции выходного сигнала ИЧФД
- момент инерции ротора БДПТ с нагрузкой,
ε - угловая скорость, ω - угловая скорость. При этом при различных
способах демодуляции выходного сигнала ИЧФД
 (1.1)
(1.1)
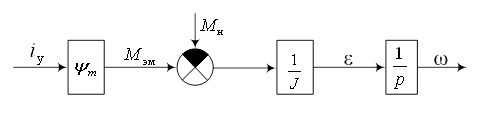
Рисунок 1.9 - Модель БДПТ
Коэффициент передачи импульсного датчика частоты вращения ИДЧ
равен ![]() (рисунок
1.10).
(рисунок
1.10).
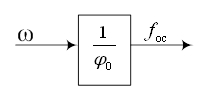
Рисунок 1.10 - Модель ИДЧ
Объединяя приведенные модели отдельных узлов электропривода, в [1] получены две структурные схемы контура ФАПЧВ при различных способах демодуляции выходного сигнала ИЧФД γ (рисунок 1.11а и 1.11б).
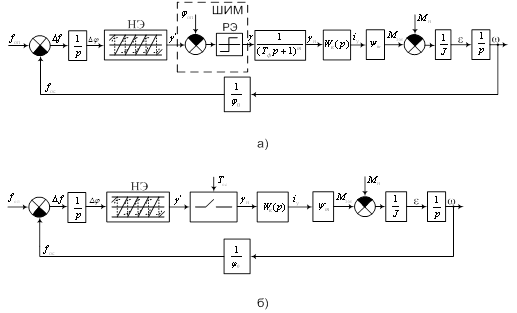
Рисунок 1.11 - Полная схема контура ФАПЧВ
Наличие в структурной схеме электропривода нелинейного элемента НЭ позволяет рассматривать электропривод с фазовой синхронизацией как систему с переменной структурой. Для анализа динамических процессов в таком электроприводе в [1] выделяются режимы работы, в которых структура системы регулирования остается неизменной, и проводится анализ динамики электропривода в каждой из этих областей.
В зависимости от рабочего участка НЭ в [1] выделяются три режима работы электропривода:
1. Режим насыщения импульсного частотно-фазового дискриминатора
при разгоне электропривода (fоп>fос). Выходной сигнал ИЧФД ![]() является непрерывной функцией
и не зависит от входного сигнала
является непрерывной функцией
и не зависит от входного сигнала ![]() . Происходит разгон электродвигателя
с максимальным ускорением εm (если пренебречь
моментом
. Происходит разгон электродвигателя
с максимальным ускорением εm (если пренебречь
моментом ![]() на
валу электродвигателя). Структурная схема электропривода в этом режиме работы преобразуется
в структурную схему разомкнутой системы регулирования с постоянным задающим воздействием
(рисунок 1.12а, где
на
валу электродвигателя). Структурная схема электропривода в этом режиме работы преобразуется
в структурную схему разомкнутой системы регулирования с постоянным задающим воздействием
(рисунок 1.12а, где ![]() ,
, ![]() - ошибки регулирования по углу и угловой
скорости).
- ошибки регулирования по углу и угловой
скорости).

а)
б)
в)
Рисунок 1.12 - Структурные схемы электропривода:
а) режим насыщения; б) в линейном режиме (в качестве демодулятора используют ФНЧ); в) в линейном режиме (в качестве демодулятора используют СВХ)
2. Режим фазового сравнения ИЧФД соответствует пропорциональному режиму работы электропривода (fоп=fос). Работа электропривода происходит на линейном участке характеристики НЭ. Неоднозначность нелинейного элемента и насыщение в этом режиме можно не учитывать. В результате НЭ заменяется линейным звеном с коэффициентом передачи, равным единице, и структурная схема контура ФАПЧВ (рисунок 1.11) преобразуется в схему, приведенную на рисунке 1.12 б.
В этом режиме работы электропривода, при выполнении условий линеаризации
нелинейных элементов, входящих в состав фазового дискриминатора и демодулятора,
система управления (рисунки 1.12 б и 1.12 в) могут быть приведены к линейной системе
автоматического регулирования, представленной на рисунке 1.13. Фильтр нижних частот
в этой схеме исключен, так как его постоянная времени обычно выбирается из условия
![]() , где
, где ![]() , ωс
- частота среза замкнутой линеаризованной системы регулирования, поэтому он практически
не оказывает влияния на процессы в электроприводе, и им можно пренебречь.
, ωс
- частота среза замкнутой линеаризованной системы регулирования, поэтому он практически
не оказывает влияния на процессы в электроприводе, и им можно пренебречь.
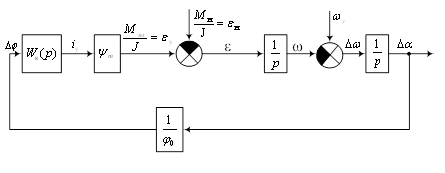
Рисунок 1.13 - Линеаризованная структурная схема электропривода в пропорциональном режиме работы.
3. Режим насыщения импульсного частотно фазового дискриминатора
при торможении электропривода (fоп<fос). Выходной сигнал ИЧФД ![]() непрерывен и зависит от
входного сигнала
непрерывен и зависит от
входного сигнала ![]() . Происходит торможение электродвигателя
с максимальным ускорением εm (если пренебречь
моментом
. Происходит торможение электродвигателя
с максимальным ускорением εm (если пренебречь
моментом ![]() на
валу электродвигателя). Структурная схема электропривода в этом режиме работы преобразуется
в структурную схему разомкнутой системы регулирования с постоянным задающим воздействием
(рисунок 1.12 а).
на
валу электродвигателя). Структурная схема электропривода в этом режиме работы преобразуется
в структурную схему разомкнутой системы регулирования с постоянным задающим воздействием
(рисунок 1.12 а).
1.4 Основы теории цифровых систем управления
В цифровых системах автоматического управления осуществляется квантование сигналов по времени и уровню (преобразование непрерывного в дискретные через равные промежутки времени, но при этом выделяется ближайший уровень непрерывного сигнала).
Квантование по времени делает всю систему управления дискретной (рисунок 1.14), а по уровню нелинейной. Разрядная сетка современных ЭВМ такова, что влиянием квантования по уровню можно пренебречь. Это делает всю систему линейной и позволяет использовать для ее расчета математический аппарат исследования импульсных систем.
Цифровой сигнал, отражающий преобразованный непрерывный сигнал в дискретный, представляет собой двоичное число - совокупность логических нулей и единиц. При исследовании цифровых систем автоматического управления этот реальный сигнал заменяют его математической абстракцией - решетчатой функцией.
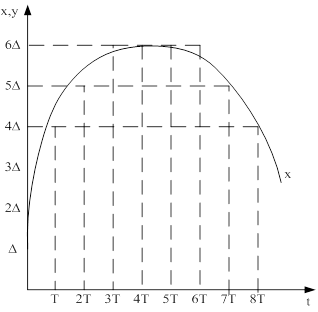
Рисунок 1.14 - График квантования сигнала по времени
Понятие решетчатой функции лежит в основе математического описания дискретных систем и позволяет осуществлять переход к дискретному аналогу дифференциальных уравнений - разностным уравнением (уравнения в конечных разностях). Эти уравнения, определяющие связь между значениями решетчатой функции с помощью конечных разностей, являются аналогами производных в дифференциальных уравнениях [8].
Первая прямая разность:
![]() (1.2)
(1.2)
получается путем вычитания из последующего значения решетчатой функции (будущего) текущего значения.
Первая обратная разность:
![]() (1.3)
(1.3)
получается путем вычитания из текущего значения предыдущего.
Первая разность является аналогом первой производной непрерывной функции.
Для решения разностных уравнений широко применяется Z-преобразование, оно вытекает из дискретного преобразования Лапласа решетчатых функций.
Преобразование Лапласа
 . (1.4)
. (1.4)
Дискретное преобразование Лапласа для решетчатых функций
 . (1.5)
. (1.5)
Z-преобразование решетчатой функции
 , (1.6)
, (1.6)
где ![]() ,
,
n = 0,
1, 2, …. ![]() .
.
Таким образом, решетчатая исходная функция заменяется ее изображением (Z-преобразованием). Переход от оригинала к изображению позволяет заменить решение разностных уравнений - решением алгебраических.
2. Выбор структуры и расчет параметров регулятора
В литературе [8] приводятся примеры аппроксимации линейных регуляторов заменой операции дифференцирования на первую разность. При этом имеется возможность использовать накопленный опыт работы с аналоговыми регуляторами и применять известные правила настройки регуляторов.
Для определения структуры цифрового КУ аппроксимируем передаточную функцию аналогового регулятора, настроенного на оптимальную работу. Исследуем влияние изменения коэффициентов регулятора, на качество управления и характер переходного процесса, и определим значения коэффициентов, при которых обеспечиваются наилучшие динамические характеристики электропривода.
Так же ставится задача исследования устойчивости электропривода с разработанным регулятором.
2.1 Расчет линейного регулятора
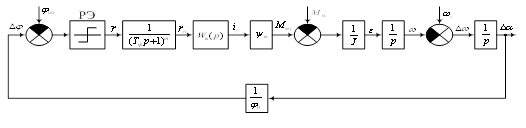
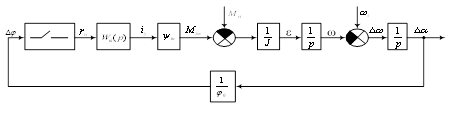
Для расчета линейного регулятора, используем модель электропривода, приведенную на рисунке 2.1 Так как в электроприводе с фазовой синхронизацией главной целью является отработка фазового рассогласования по углу поворота вала, то в качестве выходной координаты удобно принять ошибку по углу Δα. В качестве оптимального режима, примем критический переходный процесс [1].
Преобразуем структурную схему (рисунок 1.12) к виду, показанному на рисунке 2.1.
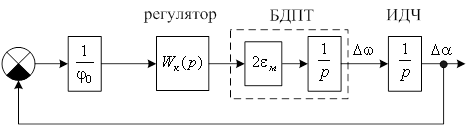
Рисунок 2.1 - Преобразованная структурная схема электропривода с фазовой синхронизацией
В [1] в качестве регулятора предлагается использовать пропорционально-дифференциальное (форсирующее) звено с передаточной функцией:
![]() . (2.1)
. (2.1)
Передаточная функция замкнутой системы с аналоговым регулятором:
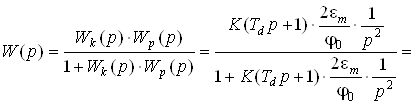
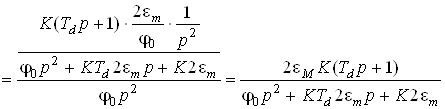 . (2.2)
. (2.2)
Обозначим
 , (2.3)
, (2.3)
где ![]() - добротность электропривода по ускорению
[1].
- добротность электропривода по ускорению
[1].
Перепишем (2.2) с учетом выражения (2.3):
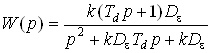 . (2.4)
. (2.4)
Переходный процесс будет иметь критический характер, если корни характеристического уравнения
![]() (2.5)
(2.5)
будут равными отрицательными.
Корни характеристического уравнения (2.5):
![]() ; (2.6)
; (2.6)
являются равными отрицательными, если дискриминант равен нулю:
![]() . (2.7)
. (2.7)
Равенство (2.7) выполняется при
 . (2.8)
. (2.8)
Проведем анализ работы электропривода, с линейным регулятором используя модель (рисунок 2.1), реализованную в программном пакете Matlab. Структурная схема модели приведена на рисунке 2.2.
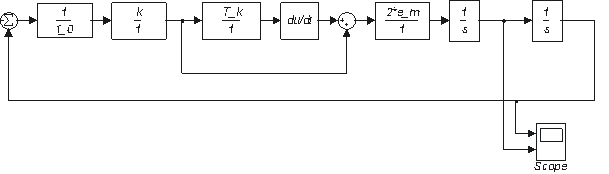
Рисунок 2.2 - Структурная схема модели электропривода с аналоговым регулятором, реализованная в MatLab
Здесь начальные условия по угловой ошибке ![]() ; по частоте вращения
; по частоте вращения ![]() ; где
; где ![]() - максимальное
перерегулирование по угловой скорости в пропорциональном режиме работы электропривода
[1]. Фазовый портрет работы электропривода с аналоговым регулятором представлен
на рисунке 2.3, диаграммы изменения ошибок по углу
- максимальное
перерегулирование по угловой скорости в пропорциональном режиме работы электропривода
[1]. Фазовый портрет работы электропривода с аналоговым регулятором представлен
на рисунке 2.3, диаграммы изменения ошибок по углу ![]() и скорости
и скорости ![]() приведены на рисунке 2.4.
приведены на рисунке 2.4.
При моделировании использовались следующие исходные данные: ![]() (рад/с2)
- максимальное угловое ускорение электродвигателя;
(рад/с2)
- максимальное угловое ускорение электродвигателя; ![]() (рад) - угловое расстояние между метками
импульсного датчика частоты;
(рад) - угловое расстояние между метками
импульсного датчика частоты;
Z = 4800 - количество меток импульсного датчика частоты;
k = 1 - коэффициент усиления корректирующего устройства.
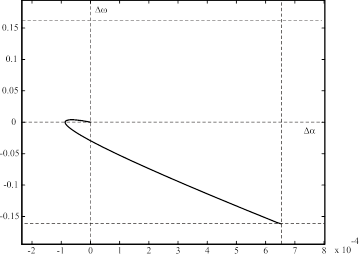
Рисунок 2.3 - Фазовый портрет работы электропривода с аналоговым ПД-регулятором.
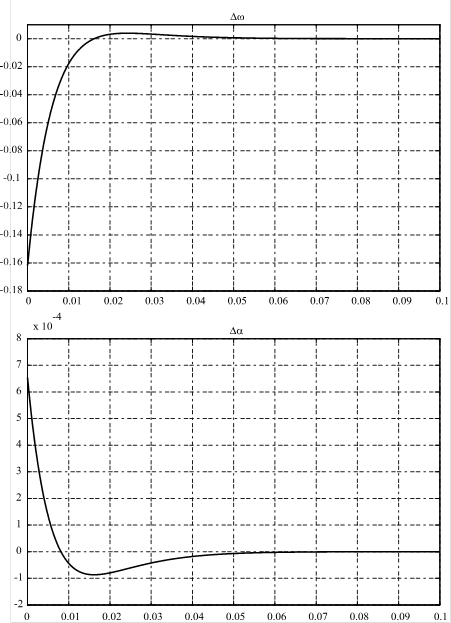
Рисунок 2.4 - Графики изменения ошибок по углу и скорости электропривода с аналоговым регулятором.
Выберем в качестве критерия оценки качества работы электропривода,
время, в течение которого, ошибка по углу входит в интервал величиной 1% от φ0.
Это утверждение справедливо в силу того, что угловая ошибка в пропорциональном режиме
работы электропривода, не может превышать величины ![]() . Из графика (рисунок 2.4) - время
регулирования
. Из графика (рисунок 2.4) - время
регулирования ![]() .
.
2.2 Синтез передаточной функции цифрового регулятора
Аппроксимируем передаточную функцию регулятора заменой операции
дифференцирования на первую разность  :
:
 ;
;
 ;
;
 . (2.9)
. (2.9)
где ![]() - период дискретизации.
- период дискретизации.
Обозначим:
![]()
![]() ; (2.10)
; (2.10)
![]() .
.
С учетом выражений (2.10) дискретная передаточная функция регулятора:
 .
.
Период дискретизации ![]() принимаем равным периоду следования
импульсов опорной частоты Топ.
принимаем равным периоду следования
импульсов опорной частоты Топ.
Структурная схема электропривода с цифровым регулятором приведена на рисунке 2.6.
Фазовый портрет работы электропривода, а так же графики изменения
ошибок по углу ![]() и скорости
и скорости ![]() , с цифровым регулятором
приведены на рисунках 2.5 и 2.7 соответственно.
, с цифровым регулятором
приведены на рисунках 2.5 и 2.7 соответственно.
При моделировании использовались те же исходные данные, что и
с аналоговым регулятором и период квантования ![]() =10-3 (с).
=10-3 (с).
Это соответствует частоте исследования опорных импульсов![]() (Гц).
(Гц).
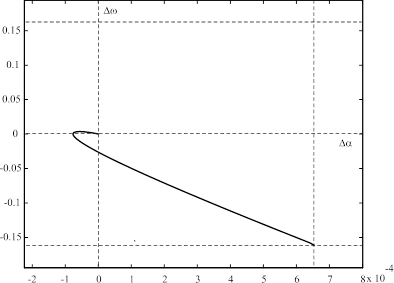
Рисунок 2.5 - Фазовый портрет работы электропривода с цифровым регулятором.
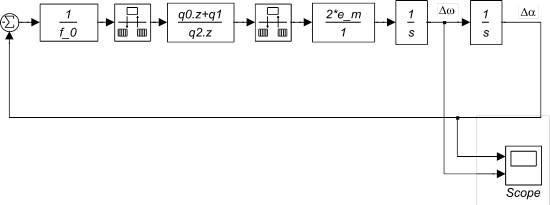
Рисунок 2.6 - Структурная схема модели электропривода с цифровым регулятором, реализованная в MatLab
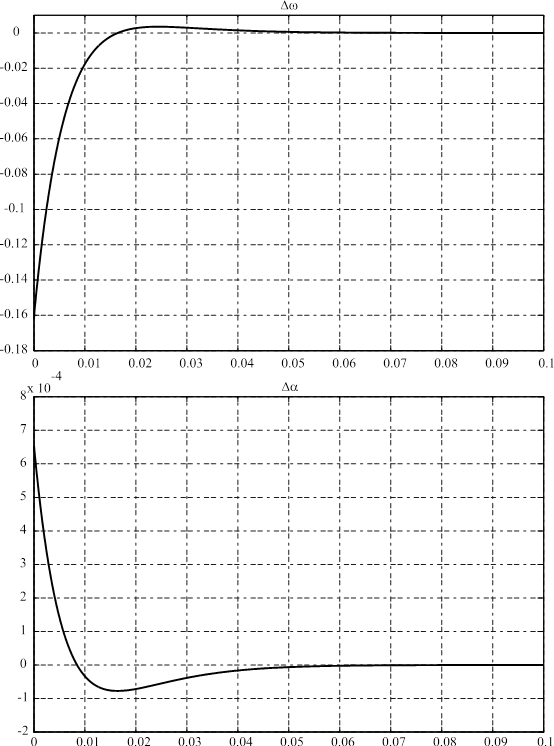
Рисунок 2.7 - Графики изменения ошибок по углу и скорости электропривода с цифровым регулятором.
2.3 Проведение параметрической оптимизации коэффициентов цифрового регулятора
Из теории автоматического управления известно, что любая цифровая система является лишь приближением аналоговой и ее поведение стремится к поведению аналоговой системы с некоторой степенью точности.
Однако в [8] указывается, что при больших тактах квантования
у цифровых систем проявляется свойства, отличные от свойств аналоговых. То есть
при аппроксимации линейного регулятора с относительно большим тактом квантования,
можно получить цифровой регулятор с оптимизацией параметров которого можно добиться
переходный процесс с меньшими ![]() и σ.
и σ.
Для проведения параметрической оптимизации коэффициентов регулятора
был применен метод проб и ошибок [8]. Данный метод заключается в последовательном
изменении, значений параметров регулятора от малых начальных значений до тех пор,
пока процесс в замкнутой системе не приобретет значительной колебательности. После
этого следует понемногу уменьшать значения параметров. Использование данного метода
обосновано простотой моделирования процессов в электроприводе на ЭВМ. В результате
оптимизации выяснилось следующее: при изменении коэффициентов q0 и q1
в числителе передаточной функции регулятора система становится неустойчивой, что
проявляется в монотонном нарастании ошибки по углу и скорости; при изменении коэффициента
q2 в знаменателе от 50 до 120% от рассчитанного
значения, характер переходного процесса изменяется от апериодического к колебательному.
В качестве критериев оптимизации выступает время регулирования ![]() и средний квадрат ошибки
управления
и средний квадрат ошибки
управления
 . (2.10)
. (2.10)
где: М - число тактов квантования, на рассматриваемом участке.
Результаты моделирования при изменении коэффициента q2 от 50 до 120% сведены в таблице 2.1 Графики зависимости времени регулирования и среднего квадрата ошибки от коэффициента q2 приведены на рисунках 2.8 и 2.9 соответственно.
Таблица 2.1
- Зависимости времени регулирования tр
и среднего квадрата ошибки ![]() от параметра q2.
от параметра q2.
|
Значение коэффициента |
Средний квадрат ошибки |
Время регулирования (вхождение в зону φ0/100), с |
| 50 |
1,4064∙10-9 |
0,0458 |
| 52 |
1,3516∙10-9 |
0,0447 |
| 54 |
1,2997∙10-9 |
0,0435 |
| 56 |
1,2505∙10-9 |
0,0423 |
| 58 |
1, 2041∙10-9 |
0,041 |
| 60 |
1,1604∙10-9 |
0,0395 |
| 62 |
1,1196∙10-9 |
0,038 |
| 64 |
1,0815∙10-9 |
0,0362 |
| 66 |
1,0462∙10-9 |
0,0342 |
| 68 |
1,0137∙10-9 |
0,0319 |
| 70 |
9,8394∙10-10 |
0,0291 |
| 72 |
9,5698∙10-10 |
0,0258 |
| 74 |
9,3281∙10-10 |
0,022 |
| 76 |
9,1142∙10-10 |
0,0183 |
| 78 |
8,9281∙10-10 |
0,0155 |
| 80 |
8,7698∙10-10 |
0,0136 |
| 82 |
8,6393∙10-10 |
0,0123 |
| 84 |
8,5366∙10-10 |
0,0255 |
| 86 |
8,4618∙10-10 |
0,0301 |
| 88 |
8,4147∙10-10 |
0,0331 |
| 90 |
8,3954∙10-10 |
0,0354 |
| 92 |
8,404∙10-10 |
0,0372 |
| 94 |
8,4403∙10-10 |
0,0388 |
| 96 |
8,5045∙10-10 |
0,0401 |
| 98 |
8,5965∙10-10 |
0,0413 |
| 100 |
8,7162∙10-10 |
0,0423 |
| 102 |
8,8638∙10-10 |
0,0432 |
| 104 |
9,0392∙10-10 |
0,044 |
| 106 |
9,2424∙10-10 |
0,0448 |
| 108 |
9,4734∙10-10 |
0,0454 |
| 110 |
9,7322∙10-10 |
0,046 |
| 112 |
1,0019∙10-9 |
0,0465 |
| 114 |
1,0333∙10-9 |
0,047 |
| 116 |
1,0676∙10-9 |
0,0475 |
| 118 |
1,1046∙10-9 |
0,0479 |
| 120 |
1,1443∙10-9 |
0,0482 |
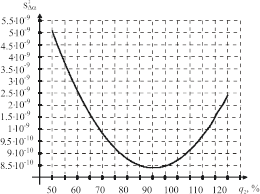
Рисунок 2.8 - График зависимости среднего квадрата ошибки ![]() от коэффициента
q2.
от коэффициента
q2.
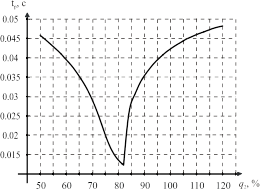
Рисунок 2.9 - График зависимости времени регулирования tр от коэффициента q2.
Из полученных графиков видно, что оптимальный режим работы электропривода обеспечивается при 0,82q2.
При этом время регулирования равно ![]() (с), средний квадрат ошибки
(с), средний квадрат ошибки ![]() .
.
Графики переходного процесса по ![]() и
и ![]() , а так же фазовый портрет работы электропривода
после оптимизации коэффициентов приведены на рисунках 2.10 и 2.12 соответственно.
, а так же фазовый портрет работы электропривода
после оптимизации коэффициентов приведены на рисунках 2.10 и 2.12 соответственно.
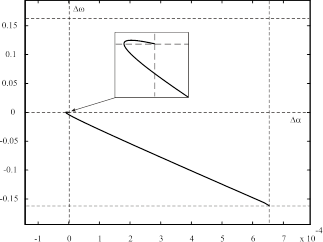
Рисунок 2.10 - Фазовый портрет работы электропривода с цифровым регулятором после проведения параметрической оптимизации.
2.4 Анализ устойчивости системы
Проведем анализ устойчивости электропривода с разработанным цифровым регулятором.
Дискретная передаточная функция объекта управления [8]
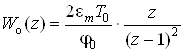 . (2.11)
. (2.11)
Структурная схема электропривода в дискретной форме приведена на рисунке 2.11.
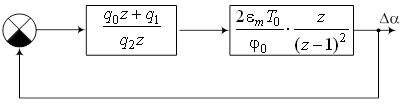
Рисунок 2.11 - Структурная схема электропривода в дискретной форме.
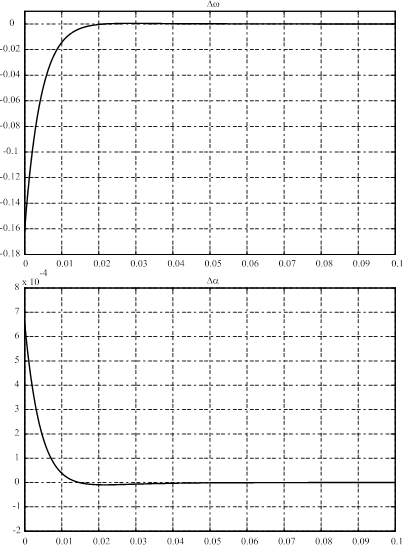
Рисунок 2.12 - Графики изменения ошибок по углу и скорости привода с цифровым регулятором после проведения параметрической оптимизации коэффициентов регулятора.
Передаточная функция замкнутой системы (рисунок 2.11)
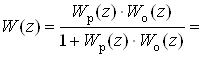
 . (2.12)
. (2.12)
Характеристический полином замкнутой системы
![]() =0. (2.13)
=0. (2.13)
Для проведения анализа устойчивости системы воспользуемся методом билинейного преобразования, применив подстановку
![]() , (2.14)
, (2.14)
в характеристическое уравнение замкнутой системы
 . (2.15)
. (2.15)
Раскроем скобки и приведем подобные
![]() , (2.16)
, (2.16)
![]() . (2.17)
. (2.17)
Так как билинейное преобразование для цифровых систем является аналогом преобразования Лапласа для линейных систем, то к полученному полиному можно применить критерий Гурвица. Так как полином имеет второй порядок, то нет необходимости находить определители Гурвица. Система будет устойчива, если все коэффициенты характеристического уравнения будут положительны. В данном случае видно, что коэффициенты характеристического полинома (2.17) положительны, следовательно, система устойчива.
3. Разработка принципиальной электрической схемы корректирующего устройства
3.1 Разработка структурной схемы корректирующего устройства
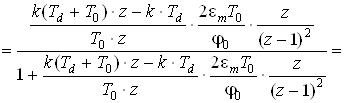
За основу корректирующего устройства примем структурную схему изображенную на рисунке 1.3 В качестве демодулятора ШИМ-сигнала ИЧФД используем схему, приведенную на рисунке 3.1.
Рисунок 3.1 - Структурная схема демодулятора
здесь ГВЧ - генератор высокой частоты вырабатывающий однополярные прямоугольные импульсы с постоянной скважностью;
СЧ - асинхронный счетчик импульсов, фиксирующий число импульсов поступающих с генератором высокой частоты;
РЕГ 1, РЕГ 2 - параллельные регистры, хранящие значения периода
дискретизации Топ и длительности импульсов ![]() .
.
Генератор высокой частоты вырабатывает однополярные прямоугольные импульсы стабильной частоты с постоянной скважностью, равной 2. Эти импульсы подсчитываются счетчиком СЧ. Сброс счетчика осуществляется по переднему фронту выходного сигнала ИЧФД γ. С выхода счетчика двоичный код поступает на входы параллельных регистров РЕГ 1 и РЕГ 2.
Регистр РЕГ1 по переднему фронту сигнала γ переписывает значение периода дискретизации с входа на выход.
Регистр РЕГ 2 по заднему фронту сигнала γ переписывает двоичное значение длительности импульса на вход. Применение параллельных регистров обусловлено требованиями к быстродействию системы, а при параллельной передаче информация о периоде дискретизации Топ и значение фазового рассогласования будет получена за один такт.
В качестве блока коррекции используем ЭВМ, в которой выполняется расчет корректирующего сигнала по заданному закону. Структурная схема блока коррекции приведена на рисунке 3.2.
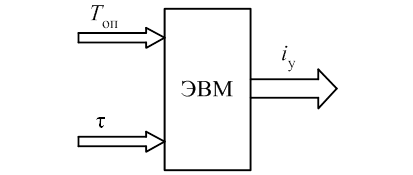
Рисунок 3.2 - Структурная схема блока коррекции
Для уменьшения погрешности, цифровую часть корректирующего устройства выполняем шестнадцатиразрядной.
3.2 Проектирование основных узлов корректирующего устройства 3.2.1 Генератор высокой частоты
В качестве генератора высокой частоты используем однокристальный генератор импульсов марки MAX038CPD [14].
Принципиальная схема генератора приведена на рисунке 3.3.
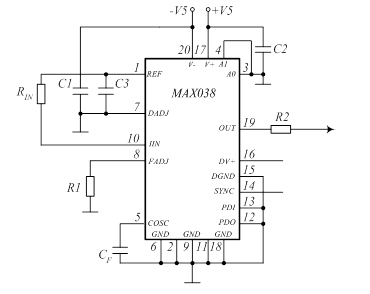
Рисунок 3.3 - Принципиальная схема генератора высокой частоты
Для получения шестнадцатиразрядного кода на выходе счетчика необходимо,
чтобы на один такт квантования Топ приходилось 65536 импульсов.
При величине опорной частоты ![]() =1 кГц., выходная частота генератора
должна быть 65,536 мГц. Частота генератора зависит от величин емкости
=1 кГц., выходная частота генератора
должна быть 65,536 мГц. Частота генератора зависит от величин емкости ![]() и сопротивления
и сопротивления
![]() [14] и определяется
как
[14] и определяется
как
![]() (3.1)
(3.1)
Для получения максимальной частоты необходимо, величину емкости принять минимальной, а величину сопротивления определить из выражения (3.1)
![]() . (3.2)
. (3.2)
Принимая ![]() (Ф), по выражению (3.2):
(Ф), по выражению (3.2):
![]() (Ом).
(Ом).
3.2.2 Счетчик импульсов
Схема счетчика импульсов приведена на рисунке 3.4.
Здесь счетчик состоит из четырех четырехразрядных счетчиков К155ИЕ7, соединенных через входы расширения емкости. Для сброса счетчика по переднему фронту сигнала γ служат инвертирующие сумматоры DD7.1-DD8.2 и D-триггер. По переднему фронту сигнала γ на выходе триггера DD2, и соответственно на сбрасывающем входе счетчика, появляется логическая единица. Счетчик обнуляется, а на выходе сумматора DD9.1 появляется логическая единица. Сигнал с выхода сумматора поступает на сбрасывающий вход D-триггера. На выходе триггера устанавливается логический нуль, и счетчик начинает считать импульсы. Таким образом, счетчик обнуляется каждый раз по переднему фронту сигнала γ, то есть период равен Топ. Элементы DD3, DD6 - К531ЛЕ7, DD10 - К155ЛН2. Триггер DD2 - К155ТМ2 [12, 13].
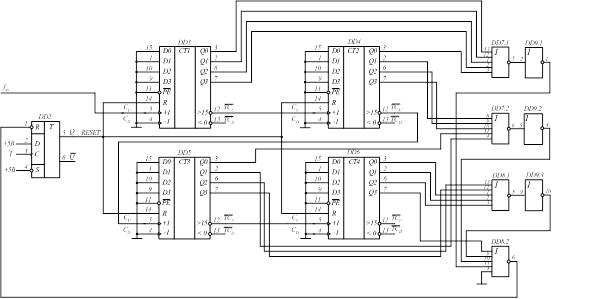
Рисунок 3.4 - Принципиальная схема счетчика импульсов
3.2.3 Регистры РЕГ1 и РЕГ2
Принципиальная схема регистров РЕГ1 иРЕГ2 приведена на рисунке 3.5 и 3.6 соответственно.
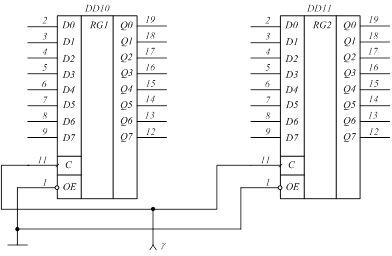
Рисунок 3.5 - Принципиальная схема регистра РЕГ1
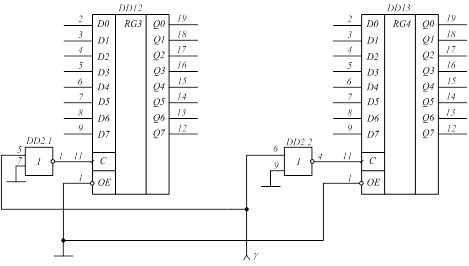
Рисунок 3.6 - Принципиальная схема регистра РЕГ2
На рисунке 3.5 элементы DD3-DD4 восьмиразрядные параллельные регистры SN74LS574N [15]. Запись производится по переднему фронту сигнала γ, подаваемого на входы С.
В схему регистра РЕГ2 дополнительно введены инверторы DD7.1 и DD9.1 - К155ЛЕ1. Благодаря этому запись в регистры производится по заднему фронту сигнала γ.
Таким образом на выходе регистра РЕГ1 будет двоичное значение периода дискретизации Топ, а на выходе РЕГ2 - длительность импульса τ.
3.2.4 Вычислительное устройство
В качестве вычислительного устройства используем микроконтроллер AVR ATMega 64, представляющий собой с RISC архитектурой. Принципиальная схема приведена на рисунке 3.7.
Микроконтроллер работает от встроенного тактового генератора на частоте 8 мГц. Программа для прошивки микроконтроллера на языке С приведена в Приложении А. Компиляция программы производится с помощью приложения "Code Vision" [16].
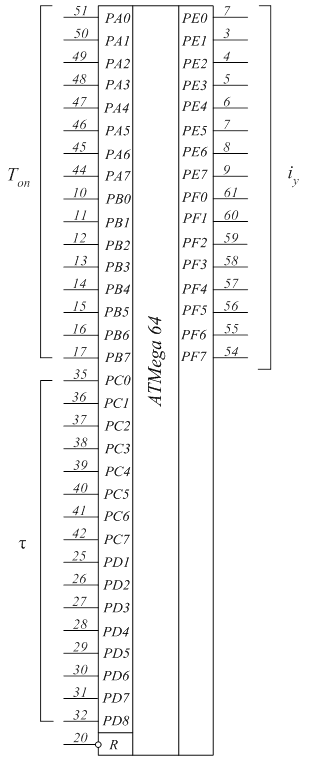
Рисунок 3.6 - Принципиальная схема вычислительного устройства
Принципиальная электрическая схема корректирующего устройства приведена на рисунке 3.7
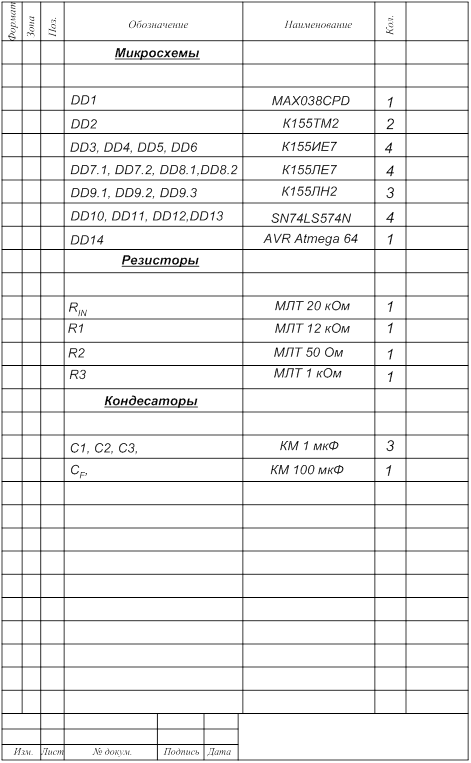
Генератор высокой частоты DD1 вырабатывает однополярные прямоугольные импульсы стабильной частоты с постоянной скважностью, равной 2. Эти импульсы подсчитываются счетчиками DD3-DD6. Сброс счетчиков осуществляется по переднему фронту выходного сигнала ИЧФД γ. Инвертирующие сумматоры DD7.1-DD7.2, DD8.1-DD8.2 и D-триггер DD2 предназначены для сброса счетчиков по переднему фронту сигнала γ. С выхода счетчиков двоичный код поступает на входы параллельных регистров DD10-DD13. Регистры DD10, DD11 по переднему фронту сигнала γ передают двоичное значение периода дискретизации на выход микроконтроллера DD14. Регистры DD12, DD13 по заднему фронту сигнала γ передают двоичное значение длительности импульса τ на выход микроконтроллера DD14. Микроконтроллер DD14 осуществляет вычисление корректирующего сигнала по прерыванию по входам, т.е. только при изменении сигнала на входах PA0-PA7, PB0-PB7, PC0-PC7, PD0-PD7. С выходов PE0-PE7, PF0-PF7 DD13 двоичное значение сигнала управления поступает на вход системы управления БДПТ. Спецификация элементов принципиальной схемы приведена в Приложении Б
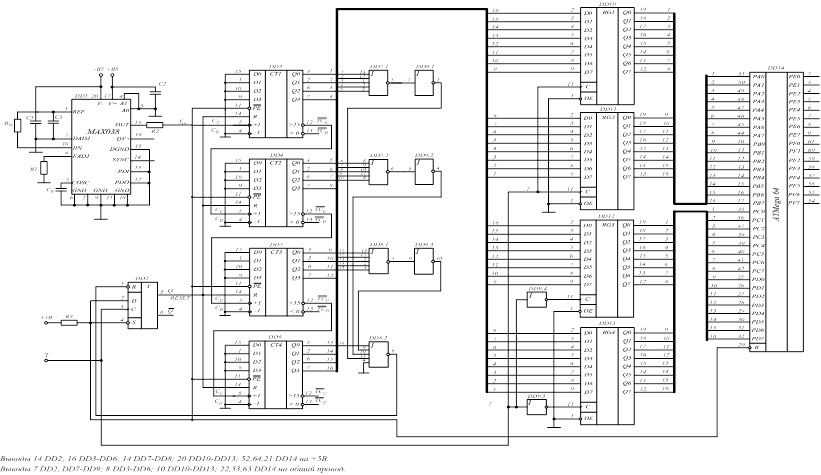
Рисунок 3.7 - Принципиальная электрическая схема корректирующего устройства
4. Экономический расчет
Затраты на проектирование цифрового регулятора для электропривода с фазовой синхронизацией определяются по формуле:
![]() , (1.1)
, (1.1)
где Сосн, зп - основная заработная плата персонала, руб.;
Сдоп, зп - дополнительная заработная плата персонала, руб.;
Сф, о - фондовые отчисления, руб.;
Спо - затраты на приобретение программного обеспечения, руб.;
Свт - затраты на содержание и эксплуатацию вычислительной техники, руб.;
Сн - накладные расходы, руб.
Основная заработная плата рассчитывается как:
![]() , (1.2)
, (1.2)
где Тразраб - время необходимое для разработки регулятора, ч;
З - основная заработная плата персонала за один час, руб. /ч.
Для разработки цифрового регулятора необходимо Тразраб=150 ч. Исполнителем является инженер. Оклад инженера третьей категории составляет 800 руб. в месяц. При условии, что продолжительность рабочего дня равна 8 ч, а в месяце 22 рабочих дня, основная заработная плата за 1 ч составит:
![]() руб. /ч.
руб. /ч.
Основная заработная плата инженера-программиста за весь период разработки в соответствии с выражением (1.2) составит:
![]() руб.
руб.
Дополнительная заработная плата рассчитывается в процентах от основной заработной платы и составляет 12%. Дополнительная заработная плата инженера-программиста за весь период разработки составит:
![]() руб.
руб.
Фондовые отчисления берутся в размере 36,6% от суммы основной и дополнительной заработной платы. Фондовые отчисления за весь период разработки и реализации модели составят:
![]() руб.
руб.
Затраты на приобретение программного обеспечения берутся как стоимость программного обеспечения. Стоимость полного пакета MatLab 7, в которой производится проектирование, 52500 руб. Следовательно затраты на приобретение программного обеспечения составят:
Спо=52500 руб.
Затраты на содержание и эксплуатацию вычислительного комплекса определяются следующим образом:
![]() , (1.3)
, (1.3)
где см-ч - стоимость машино-часа, руб. /ч.
Стоимость машино-часа:
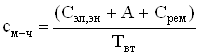 , (1.4)
, (1.4)
где Сэл, эн - стоимость потребляемой в год электроэнергии, руб.;
А - амортизация в год, руб.;
Срем - затраты на ремонт в год, руб.;
Твт - действительный фонд времени работы вычислительной техники, ч.
Стоимость потребляемой в год электроэнергии:
![]() , (1.5)
, (1.5)
где р - мощность, потребляемая из сети одной ЭВМ, кВт;
Тном - номинальный фонд времени работы ЭВМ в год, ч;
сэ - стоимость 1 кВт/ч электрической энергии, руб. / (кВт∙ч).
Мощность, потребляемая из сети одной ЭВМ, р=0,25 кВт. Стоимость 1 кВт∙ч электрической энергии сэ=1,2 руб. / (кВт∙ч). При условии, что продолжительность рабочего дня равна 8 ч, а в месяце 22 рабочих дня, номинальный фонд времени работы ЭВМ равен:
Tном=8∙22∙12=2112 ч.
За год отчисления на электрическую энергию составят:
![]() руб.
руб.
Амортизация вычислительной техники считается как 25% от ее балансовой стоимости. Стоимость ЭВМ, необходимой для работы - 15000 руб. Амортизация вычислительной техники за год составит:
![]() руб.
руб.
Затраты на ремонт в год считаются как 4% от стоимости ЭВМ и составляют:
![]() руб.
руб.
Действительный фонд времени работы ЭВМ в год рассчитывается как:
![]() , (1.6)
, (1.6)
где Тном - номинальный годовой фонд времени работы ЭВМ, ч; Тпроф - годовые затраты времени на профилактические работы (принимаются 10% от Тном), ч. Действительный фонд времени работы ЭВМ по выражению (1.6):
![]() ч.
ч.
Стоимость машино-часа по выражению (1.4):
 руб. /ч.
руб. /ч.
Затраты на содержание и эксплуатацию ЭВМ по выражению (1.3):
![]() руб.
руб.
Накладные расходы рассчитываются как 30% от основной заработной платы и составляют:
![]() руб.
руб.
Смета затрат на разработку и моделирование приведена в таблице 4.1.
Таблица 4.1 - Сводная смета затрат.
|
№ п/п |
Наименование статьи расхода |
Цена за единицу, руб. |
Кол-во |
Стоимость, руб. |
| 1 |
Основная заработная плата персонала. |
- | - | 681 |
| 2 |
Дополнительная заработная плата персонала. |
- | 12% | 81,72 |
| 3 | Фондовые отчисления. | - | 36,6% | 279,16 |
| 4 | Программное обеспечение. | 52500 | 1 | 52500 |
| 5 | Содержание и эксплуатация вычислительной техники. | 393 | 1 | 393 |
| 6 | Накладные расходы. | - | 30% | 204,3 |
| ИТОГО: | 54139,18 | |||
5. Охрана труда
5.1 Анализ опасных и вредных производственных факторов на рабочем месте оператора ЭВМ
Рассматриваемое рабочее место (лаборатория) будет использоваться для проведения лабораторных и исследовательских работ с использованием ЭВМ. Таким образом, нужно рассмотреть факторы, воздействующие на оператора ЭВМ. На рабочем месте оператора ЭВМ присутствуют следующие опасные и вредные производственные факторы (согласно ГОСТ 12.0.003. - 74 [14]):
1. неблагоприятные параметры микроклимата (повышенная или пониженная температура воздуха рабочей зоны, влажность воздуха, подвижность воздуха);
2. недостаточная освещенность рабочей зоны;
3. повышенный уровень шума на рабочем месте;
4. повышенный уровень вибрации на рабочем месте;
5. электробезопасность (воздействие электрического тока, статического электричества);
6. повышенный уровень электромагнитных излучений;
7. Эргодические возможности рабочего места.
5.1.1 Микроклимат
На состояние человеческого организма большое влияние оказывает микроклимат в помещении.
В соответствии с ГОСТ 12.1.005-88 [15] микроклимат помещения - это климат внутренней среды этого помещения, который определяется действующими на организм человека сочетаниями температуры, влажности и скорости движения воздуха, а также температуры окружающих поверхностей.
Гигиенические требования к показателям микроклимата производственных помещений приведены в ГОСТ 12.1.005-88 [15]. Соотношения температуры и относительной влажности неподвижного (при скорости движения - не более 0,1 м/с) воздуха, оказывающие одинаковое тепловое воздействие, приведены в таблице 6.1.
Таблица 6.1 - Оптимальные соотношения температуры и относительной влажности воздуха
|
Температура, 0С |
19 | 20 | 21 |
| Относительная влажность, % | 62 | 58 | 55 |
Оптимальные и допустимые параметры микроклимата на рабочих местах (категория работы легкая (Ιа)), в соответствии с ГОСТ 12.1.005-88 [15], приведены в таблице 6.2.
Таблица 6.2 - Оптимальные и допустимые параметры микроклимата
| Сезон года |
Категория работы |
Температура, 0С |
Скорость движения воздуха, м/с |
Относительная влажность, % | |||
| опт. | доп. | опт. | доп. | опт. | доп. | ||
| Холодный и переходный | Легкая (Iа) | 20-23 | 18-25 | 0,1 | 0,1 | 40-60 | 75 |
| Теплый | Легкая (Iа) | 22-25 | 20-27 | 0,1 | 0,1-0,2 | 40-60 | 75 |
Мероприятия по оптимизации микроклимата лаборатории следует проводить в соответствии с СанПиН 2.2.2.542-96 [17].
Помещения с ЭВМ перед началом и после каждого академического часа учебных занятий должны быть проветрены, что обеспечивает улучшение качественного состава воздуха, в том числе и аэроионный режим. Отделка помещений предусматривает влажную уборку. Поверхности стен помещения, окон и т.д. должны быть гладкими и покрыты масляной краской светлых тонов.
В случае необходимости, при повышенной температуре окружающего воздуха в теплое время года, необходимо применять вентиляцию, кондиционирование воздуха, теплозащитные экраны, а при пониженной температуре окружающего воздуха в холодное время года необходимо установить воздушные завесы, дополнительные обогревательные приборы с учетом всех мер противопожарной безопасности.
Для повышения влажности воздуха в помещениях с ЭВМ рекомендуется применять увлажнители воздуха, а для понижения влажности - естественную и искусственную вентиляцию, кондиционирование.
5.1.2 Освещение
Согласно СанПиН 2.2.2.542-96 [17], помещения с ЭВМ должны иметь естественное и искусственное освещение. Естественное освещение должно осуществляться через светопроемы, ориентированные преимущественно на север и северо-восток, и обеспечивать коэффициент естественной освещенности (КЕО) не ниже 1.2% в зонах с устойчивым снежным покровом и не ниже 1.5% на остальной территории. В таблице 6.3 приведены нормы проектирования естественного, совмещенного и искусственного освещения для третьего разряда зрительной работы по СНиП 23.05-95 [18].
Таблица 6.3 - Нормы проектирования естественного, совмещенного и искусственного освещения
|
Характеристика зрительной Работы |
Разряд | Мин. объект различения, мм |
Совмещ. освещение, КЕО, % |
Естеств. освещение, КЕО, % |
Искусственное освещение, лк |
|
| боковое | боковое | комб. | общее | |||
|
Высокой точности |
IIIб | 0,3 - 0,5 | 1,2 | 2 | 1000 | 300 |
Следует ограничивать прямую блесткость от источников освещения, при этом яркость светящихся поверхностей (окна, светильники и др.), находящихся в поле зрения, должна быть не более 200 кд/кв. м. Также следует ограничивать отраженную блесткость на рабочих поверхностях (экран, стол, клавиатура и др.) за счет правильного выбора типов светильников и расположения рабочих мест по отношению к источникам естественного и искусственного освещения.
Существует несколько разновидностей источников искусственного света, но газоразрядные лампы имеют ряд преимуществ. Световая отдача их достигает 50-100 лм/Вт, срок службы до 10000 ч, нагреваются лампы до 30-60°С, яркость их составляет 5000-7000 кд/м2, возможно получить световое излучение практически любой части спектра. Самым простым способом устранения стробоскопического эффекта является использование двухламповых светильников с емкостным и индуктивным балластами.
Общее освещение следует выполнять в виде сплошных или прерывистых линий светильников, расположенных сбоку от рабочих мест, параллельно линии зрения пользователя при рядном расположении ЭВМ. При периметральном расположении компьютеров линии светильников должны располагаться локализовано над рабочим столом ближе к его переднему краю, обращенному к оператору.
5.1.3 Расчет искусственного освещения
Тип помещения - сухое, непыльное, среднегодовая температура 20° С. Исходя из этого, выбираем в качестве источника света люминесцентные лампы, а светильники серии ЛСП.
Световой поток одной лампы рассчитывается по формуле:
![]() , (6.1)
, (6.1)
где ![]() - расчетный световой поток одной лампы,
лм;
- расчетный световой поток одной лампы,
лм;
![]() - минимальная освещенность, лк;
- минимальная освещенность, лк;
![]() - коэффициент запаса;
- коэффициент запаса;
![]() - коэффициент, учитывающий неравномерность
освещения;
- коэффициент, учитывающий неравномерность
освещения;
![]() - площадь освещаемого помещения, м2;
- площадь освещаемого помещения, м2;
![]() - общее расчетное число светильников;
- общее расчетное число светильников;
![]() - коэффициент использования светового
потока.
- коэффициент использования светового
потока.
Для дисплейных классов значение освещенности рекомендуется принимать
в диапазоне ![]() =
300 - 500 лк. Принимаем
=
300 - 500 лк. Принимаем ![]() = 300 лк.
= 300 лк.
Коэффициент запаса ![]() = 1,5; учитывая неравномерность освещения
(отражение от потолка, стен, пола соответственно равно 70, 50 и 10 %), примем z = 1,2. Площадь помещения S =
3 ∙ 6 = 18
= 1,5; учитывая неравномерность освещения
(отражение от потолка, стен, пола соответственно равно 70, 50 и 10 %), примем z = 1,2. Площадь помещения S =
3 ∙ 6 = 18 ![]() , высота потолка 4 м. Определим число светильников. Для этого определим расстояние между рядами:
, высота потолка 4 м. Определим число светильников. Для этого определим расстояние между рядами:
![]() =
1,2 ∙ 4 = 4,8 м, где 1,2 - коэффициент для ламп серии ЛСП. Два светильника
по две лампы располагаем поперек помещения на расстоянии 4 м друг от друга, как представлено на рисунке 6.1.
=
1,2 ∙ 4 = 4,8 м, где 1,2 - коэффициент для ламп серии ЛСП. Два светильника
по две лампы располагаем поперек помещения на расстоянии 4 м друг от друга, как представлено на рисунке 6.1.
Показатель помещения равен:
![]() (6.2)
(6.2)
Коэффициент использования светового потока ![]() = 0,5.
= 0,5.
![]() лм.
(6.3)
лм.
(6.3)
Выбираем люминесцентные лампы ЛБ мощностью 80 Вт (в одном светильнике 2 лампы), со световым потоком равным 5220 лк.
Действительная освещенность определяется по формуле:
![]() лк. (6.4)
лк. (6.4)
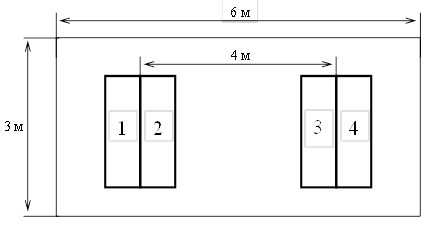
Рисунок 6.1 - Расположение осветительных установок
Выбор сечения плавкой вставки предохранителя или тип автоматического выключателя установки общего освещения выбирается по силе тока в сети с учетом запаса 20%.
![]() А, (6.5)
А, (6.5)
где ![]() - напряжение сети питания, В.
- напряжение сети питания, В.
Мощность осветительной установки:
![]() = 80 ∙ 4 = 320 Вт. (6.6)
= 80 ∙ 4 = 320 Вт. (6.6)
5.1.4 Шум
Источником шума в рассматриваемой лаборатории являются механические устройства ЭВМ и периферийное оборудование (колеблющиеся твердые части, к которым можно отнести системы вентиляции оборудования, дисководы, каретки и приводы принтеров).
Нормируемые параметры шума на рабочих местах определены ГОСТ 12.1.003-83 [19] и СН 2.2.4/2.1.8.562-96 [20] и приведены в таблице 6.4 и на рисунке 6.2.
Согласно СанПиН 2.2.2.542-96 [17], при выполнении основной работы на ЭВМ (диспетчерские, операторские, расчетные кабины и посты управления, залы вычислительной техники и др.), уровень шума на рабочем месте не должен превышать 60 дБА. Производственные помещения, в которых для работы используются преимущественно ЭВМ и учебные помещения (аудитории вычислительной техники, дисплейные классы, кабинеты и др.), не должны граничить с помещениями, в которых уровни шума превышают нормируемые значения (механические цеха, мастерские, гимнастические залы и т.п.). Шумящее оборудование (АЦПУ, принтеры и т.п.), уровни шума которого превышают нормированные, должно находиться вне помещения с ВДТ и ПЭВМ.
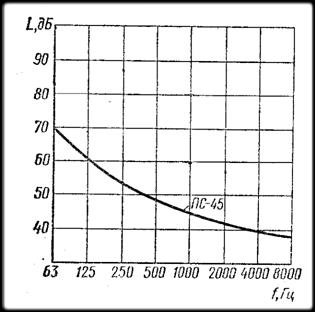
Рисунок 6.2 - Нормирование шума по предельному спектру
Таблица 6.4 - Нормируемые параметры шума на рабочих местах
|
Тип помещения |
Октавные уровни звукового давления, дБ, на среднегеометрических частотах, Гц |
Уровень звука, дБА | ||||||||
| 31.5 | 63 | 125 | 250 | 500 | 1000 | 2000 | 4000 | 8000 | ||
|
Лаборатория ЭВМ |
86 | 71 | 61 | 54 | 49 | 45 | 42 | 40 | 38 | 60 |
Снизить уровень шума в помещениях с ВДТ и ПЭВМ можно использованием звукопоглощающих материалов с максимальными коэффициентами звукопоглощения в области частот 63 - 8000 Гц для отделки помещений, подтвержденных специальными акустическими расчетами. Дополнительным звукопоглощением служат однотонные занавеси из плотной ткани, гармонирующие с окраской стен и подвешенные в складку на расстоянии 15-20 см от ограждения.
5.1.5 Вибрация
Нормируемые параметры вибрации на рабочих местах определены СН 2.2.4/2.1.8.566-96 [21] и ГОСТ 12.1.012-90 [22] и приведены в таблице 6.5 и на рисунке 6.3.
Мерами борьбы с вибрацией служат: снижение вибраций в источнике, отстройка от режима резонанса, вибродемпфирование, динамическое гашение.
Согласно СанПиН 2.2.2.542-96 [17] производственные помещения, в которых для работы используются преимущественно ЭВМ и учебные помещения (аудитории вычислительной техники, дисплейные классы, кабинеты и др.), не должны граничить с помещениями, в которых уровни вибрации превышают нормируемые значения (механические цеха, мастерские, гимнастические залы и т.п.).
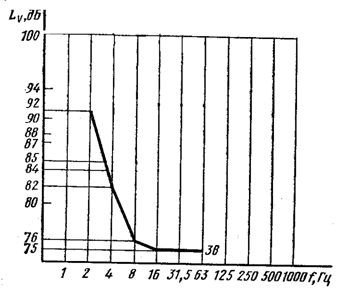
Рисунок 6.3 - Гигиенические нормы вибраций в лаборатории ЭВМ
Таблица 6.5 - Допустимые нормы вибрации на рабочих местах с ЭВМ
| Среднегеометрические | Допустимые значения | |||
| частоты октавных | по виброускорению | по виброскорости | ||
| полос, Гц |
мс-2 |
дБ |
мс-1 |
дБ |
| оси X, Y | ||||
| 2 | 5,3х10 | 25 | 4,5х10 | 79 |
| 4 | 5,3х10 | 25 | 2,2х10 | 73 |
| 8 | 5,3х10 | 25 | 1,1х10 | 67 |
| 16 | 1,0х10 | 31 | 1,1х10 | 67 |
| 31,5 | 2,1х10 | 37 | 1,1х10 | 67 |
| 63 | 4,2х10 | 43 | 1,1х10 | 67 |
| Корректированные значения и их уровни в дБ W | 9,3х10 | 30 | 2,0х10 | 72 |
В отношении электробезопасности лаборатория должна соответствовать ГОСТ 12.2.007.0-75 [23]. В лаборатории имеется электрооборудование (2 ЭВМ, сканнер, принтер, осциллограф, электрочайник и др.) суммарной мощностью не более 4 кВт. Все электрооборудование лаборатории относится к установкам напряжением до 1000 В. По степени поражения электрическим током - к классу "без повышенной опасности" (сухое, влажность в помещении не превышает 60%, нет возможности одновременного прикосновения к корпусам электрического оборудования, а также к заземленным частям, температура воздуха не превышает 35оС). В помещении лаборатории основными техническими средствами, обеспечивающими безопасность работ, являются: обеспечение недоступности токоведущих частей; защитное заземление; защитное отключение.
Заземлению подлежат корпуса ЭВМ и иных приборов, металлические оболочки кабелей и проводов. Для участка персональных компьютеров наиболее приемлемым вариантом является защитное заземление, т.к. корпуса компьютеров и периферии обычно выполнены не из токопроводящих материалов, а также имеются специальные клеммы для подключения заземления. Для электроустановок с напряжением до 1000 В сопротивление заземляющего устройства должно быть не более 4 Ом. Обеспечение недоступности токоведущих частей достигается изолированием токоведущих кабелей и проводов. ГОСТ 12.2.007.0-75 [23] устанавливает предельно допустимые уровни напряжений прикосновения и токов, протекающих через тело человека (таблица 6.6).
Источниками электростатического поля на рабочем месте оператора ЭВМ являются дисплей и периферийные устройства. Для ограничения вредного воздействия электростатического поля проводится его нормирование (таблица 6.7).
Таблица 6.6 - Предельно допустимые уровни напряжений прикосновения и токов
| Род и частота тока | Наибольшие допустимые значения | |
| Uпр, В | I, мА | |
|
Переменный, 50 Гц Переменный, 400 Гц Постоянный |
2 3 8 |
0,3 0,4 1,0 |
Таблица 6.7 - Предельно допустимый уровень напряжённости электростатического поля
| Измеряемая величина, единица | Предельно допустимый уровень | |
| Нормируемое значение | Погрешность, % | |
|
Напряжённость электростатического поля, кВ/м |
При воздействии: до 1 часа, от 1 до 9 часов,
в диапазоне 20 - 60 |
5 |
Основным способом защиты от статического электричества является заземление периферийного оборудования, а также увлажнение окружающего воздуха.
5.1.7 Электромагнитное излучение
Уровни электромагнитного излучения (ЭМИ) в лаборатории должны соответствовать ГОСТ 12.1.006-84 [24].
На живой организм влияют как искусственные (мониторы ЭВМ, ЭЛТ осциллографа, трансформаторы, антенны и т.д.), так и естественные ЭМИ (радиоизлучения солнца, магнитное поле земли и т.д.).
Допустимые значения параметров неионизирующих электромагнитных излучений представлены в таблице 6.8.
Основными способами защиты от воздействия ЭМИ являются: уменьшение интенсивности облучения от самого источника, экранирование источника излучения, экранирование рабочего места, применение средств индивидуальной защиты.
Таблица 6.8 - Допустимые значения параметров неионизирующих ЭМИ
| Наименование параметров | Допустимое значение |
| Напряженность электромагнитного поля по электрической составляющей на расстоянии 50 см от поверхности видеомонитора | 10 В/м |
|
Напряженность электромагнитного поля по магнитной составляющей на расстоянии 50 см от поверхности видеомонитора |
0,3 А/м |
| Напряженность электростатического поля не должна превышать: | |
| - для взрослых пользователей | 20 кВ/м |
| - для детей дошкольных учреждений и учащихся средних специальных и высших учебных заведений | 15 кВ/м |
|
Напряженность электромагнитного поля на расстоянии 50 см вокруг ВДТ по электрической составляющей должна быть не более: |
|
| - в диапазоне частот 5 Гц - 2 кГц; | 25 В/м |
| - в диапазоне частот 2 - 400 кГц | 2,5 В/м |
| Поверхностный электростатический потенциал не должен превышать: | 500 В |
5.1.8 Эргономические возможности рабочего места
Работа на ЭВМ сопряжена со статическими физическими перегрузками. Нервное перенапряжение программиста обусловлено уровнем напряжения внимания, сложностью производимых расчетов, напряжением зрения. Тяжесть и напряженность трудового процесса регламентированы руководством ГОСТ 12.1.004-76 [26] (таблица 6.8). Работа на ЭВМ также сопряжена с умственной деятельностью. При умственной работе происходит сужение сосудов конечностей и расширение сосудов внутренних органов.
При статических физических перегрузках мышцы ног, плеч, шеи и рук длительно пребывают в состоянии сокращения. В них ухудшается кровообращение. Питательные вещества, переносимые кровью, поступают в мышцы недостаточно быстро, в тканях накапливаются продукты распада, в результате чего могут возникнуть болезненные ощущения.
Поскольку каждое нажатие на клавишу сопряжено с сокращением мышц, сухожилия непрерывно скользят вдоль костей и соприкасаются с тканями. Вследствие чего могут возникнуть воспалительные процессы. Распухшие, вследствие повторяющихся движений, оболочки сухожилий могут сдавить нерв. Возникает запястный синдром.
Нервное перенапряжение программиста обусловлено уровнем напряжения внимания, сложностью производимых расчетов, напряжением зрения. Частое и длительное перенапряжение может служить источником ряда заболеваний сердечно-сосудистой, нервной, зрительной и других систем организма.
Работа на ЭВМ также сопряжена с умственной деятельностью. Умственная деятельность - это деятельность, прежде всего центральной нервной системы, ее высшего отдела коры головного мозга.
При умственной работе происходит сужение сосудов конечностей и расширение сосудов внутренних органов.
Для предотвращения возникновения вредных последствий от статических физических перегрузок, необходимо оборудовать место так, чтобы исключить неудобные позы, длительные напряжения. Для предотвращения перенапряжения анализаторов необходимо определить оптимальный яркостной режим.
Дисплей должен быть установлен на такой высоте и под таким углом, чтобы шея оператора не была согнута и удерживаема в таком состоянии напряженными мышцами.
Таблица 6.8 - Время регламентированных перерывов в зависимости от продолжительности рабочей смены, вида и категории трудовой деятельности
|
Категория работы с ВДТ или ЭВМ |
Уровень нагрузки за рабочую смену при видах работ с ВДТ | Суммарное время регламентированных перерывов, мин. | |||
| группа А, количество знаков | группа Б, количество знаков | группа В, час. | при 8-ми часовой смене |
при 12-ти часовой смене |
|
| I | до 20000 | до 15000 | до 2,0 | 30 | 70 |
| II | до 40000 | до 30000 | до 4,0 | 50 | 90 |
| III | до 60000 | до 40000 | до 6,0 | 70 | 120 |
Клавиатура должна располагаться так, чтобы до нее не нужно было тянуться, руки не должны быть на весу или перенапряжены. Нельзя долго находиться в одной позе. Каждый час в течение 15 мин. необходимо заниматься каким-либо другим делом, сделать разминку. Расстояние считывания информации с экрана может быть от 400 мм и более.
5.2 Противопожарная безопасность
Пожарная безопасность может быть обеспечена мерами пожарной профилактики и активной пожарной защитой.
Основы противопожарной защиты определены стандартами ГОСТ 12.1.004-76 [26].
Согласно НПБ 105-95 [27] определяем категорию помещения. Помещение компьютерной лаборатории, в которой проводятся работы, по нормам пожарной безопасности в соответствии с НПБ-105-95 относится к категории "Д" - негорючие вещества и материалы в холодном состоянии.
Для организации противопожарной защиты в лаборатории необходимы следующие условия:
в помещении должна иметься головка спринклера;
в помещении должен иметься датчик пожарной сигнализации РИД-1, ИДФ-ТМ, ДИП-1, или аналогичный.
в помещении должны иметься переносные средства пожаротушения, пригодные для тушения электрооборудования (углекислотные огнетушители ОУ-2, ОУ-5, ОУ-8, ОУ-25, ОУ-80, ОУ-400, ручные порошковые огнетушители ОПС-6, ОПС-10, портативный ОП-1), периодичность замены которых является непременным условием работы.
в помещении должны иметься кнопки пожарной сигнализации находящиеся в застекленных ящичках, а в коридоре пожарные краны;
все в лаборатории должно находиться в чистоте. На видных местах вывешены инструкции пожарной безопасности, планы эвакуации работников, а также имущества, в первую очередь документов, магнитных носителей информации и других ценностей; таблички с фамилиями лиц, ответственных за организацию противопожарной защиты;
доступ к местам расположения средств пожаротушения всегда должен быть свободен для прохода;
проходы, выходы, лестницы, чердачные помещения должны не загромождаться и не захламляться и обеспечивать свободу перемещения. Необходимо ввести общий выключатель для обесточивания помещения при возгорании проводки;
легко воспламеняющиеся вещества нужно хранить в металлическом сейфе или в ящиках из трудно воспламеняющихся материалов;
двери должны открываться наружу (из помещения) и не иметь порогов - это необходимо для быстрой и безопасной эвакуации.
Все работники и специалисты должны проходить специальную противопожарную подготовку в системе производственного обучения с целью изучения правил пожарной безопасности и адекватного поведения при возможной ситуации пожара. Ответственный за пожарную безопасность лаборатории ЭВМ В.Л. Федоров.
Заключение
Разработанный электропривод с цифровым регулятором соответствует требованиям технического задания.
В процессе дипломирования было исследовано цифровое корректирующие устройство для электропривода с фазовой синхронизацией. Передаточная функция цифрового корректирующего получена аппроксимацией линейного регулятора путем замены операции дифференцирования на первую разность. Была проведена параметрическая оптимизация коэффициентов регулятора методом "проб и ошибок". Так же исследовали устойчивость электропривода с разработанным регулятором. Разработана принципиальная электрическая схема корректирующего устройства.
Для подтверждения теоретических данных и исследования переходных процессов в электроприводе с фазовой синхронизацией с разработанным корректирующим устройством проведено его моделирование в приложении SIMULINK программного пакета MatLab 7.01.
Список литературы
1. Бубнов А.В. Вопросы анализа и синтеза прецизионных систем синхронно-синфазного электропривода постоянного тока: Научное издание. - Омск: Омский научный вестник, 2004. - 131 с.
2. Трахтенберг Р.М. Импульсные астатические системы электропривода с дискретным управлением. - М.: Энергоиздат, 1982. - 416 с.
3. Башарин А.В., Управление электроприводами / А.В. Башарин, В.А. Новиков, Г.Г. Соколовский. - Л.: Энергоиздат, 1982. - 392
4. Фалеев М.В. Высокочастотные системы синхронно-синфазного электропривода / М.В. Фалеев, А.Н. Ширяев // Электроприводы с улучшенными характеристиками для текстильной и легкой промышленности. - Иваново, 1986. - С. 20-27.
5. Бубнов А.В. Импульсный частотно-фазовый дискриминатор для прецизионного синфазного электропривода / А.В. Бубнов, В.Л. Федоров. - Омск, 1999. - Деп. В ВИНИТИ 23.12.99 № 3806 - В99. - 13с.
6. Овчинников И.Е., Лебедев Н.И., Бесконтактные двигатели постоянного тока с транзисторными коммутаторами. Л., "Наука", 1979. - 270 с.
7. Александров А.Г. Синтез регуляторов многомерных систем. - М.: Машиностроение, 1986, 272 с., ил.
8. Изерман Р. Цифровые системы управления: Пер. с англ. - М.: Мир, 1984. - 541 с., ил.
9. Букреев И.Н. Микроэлектронные схемы цифровых устройств. Изд.2-е, перераб. и доп.М., "Сов. Радио". 1975. - 368 с. с ил.
10. Опадчий Ю.Ф., Глудкин О.П. Гуров А.И. Аналоговая и цифровая электроника: Учебник для вузов. Под ред. О.П. Глудкина. - М.: Горячая - Телеком, 2003. - 768 с.: ил.
11. Вульвет Дж. Датчики в цифровых системах: Пер. с англ. - М: энергоиздат, 1981. - 200с
12. Гутников В.С. Интегральная электроника в измерительных устройствах. - Л.: Энергия. Ленингр. отд-ние, 1980. - 248 с., ил.
13. Шило В.Л. Популярные цифровые микросхемы: Справочник.2-е изд., испр. - Челябинск: 1989. - 352 с.:
14. ГОСТ 12.0.003. - 74. Система стандартов безопасности труда. Опасные и вредные производственные факторы. Классификация. - М.: Изд-во стандартов, 1999.
15. ГОСТ 12.1.005-88. Система стандартов безопасности труда. Общие санитарно-гигиенические требования к воздуху рабочей зоны. - М.: Изд-во стандартов, 1989.
16. СанПиН 2.2.4.548-96. Гигиенические требования к микроклимату производственных помещений. - М.: Изд-во стандартов, 1996.
17. СанПиН 2.2.2.542-96. Гигиенические требования к видеодисплейным терминалам, персональным электронно-вычислительным машинам и организации работы. - М.: Изд-во стандартов, 1996.
18. СНиП 23.05-95. Естественное и искусственное освещение. - М.: Изд-во стандартов, 1995.
19. ГОСТ 12.1.003-83. Система стандартов безопасности труда. Шум. Общие требования безопасности. - М.: Изд-во стандартов, 1999.
20. СН 2.2.4/2.1.8.562-96. Шум на рабочих местах, в помещениях жилых, общественных зданий и на территории жилой застройки. - М.: Изд-во стандартов, 1996.
21. СН 2.2.4/2.1.8.566-96. Производственная вибрация. Вибрация в помещениях жилых и общественных зданий. - М.: Изд-во стандартов, 1996.
22. ГОСТ 12.1.012-90. Система стандартов безопасности труда. Вибрационная безопасность. Общие требования. - М.: Изд-во стандартов, 1997.
23. ГОСТ 12.2.007.0-75. Система стандартов безопасности труда. Изделия электротехнические. Общие требования безопасности. - М.: Изд-во стандартов, 1999.
24. ГОСТ 12.1.006-84. Система стандартов безопасности труда. Электромагнитные поля радиочастот. Допустимые уровни на рабочих местах и требования к проведению контроля. - М.: Изд-во стандартов, 1999.
25. Р 2.2.755-99. Гигиенические критерии оценки условий труда по показателям вредности и опасности факторов производственной среды, тяжести и напряженности трудового процесса. - М.: Изд-во стандартов, 1999.
26. ГОСТ 12.1.004-76. Система стандартов безопасности труда. Пожарная безопасность. Общие требования. - М.: Изд-во стандартов, 1997.
27. НПБ 105-95. Определение категорий помещений и зданий по взрывопожарной и пожарной опасности. - М.: Изд-во стандартов, 1996.
Приложения
Приложение А
Текст программы для микроконтроллера AVR ATMega64,вычисляющей значение сигнала управления
/*****************************************************
This program was produced by the
CodeWizardAVR V1.24.2c Standard
Automatic Program Generator
© Copyright 1998-2004 Pavel Haiduc, HP InfoTech s. r. l.
http://www.hpinfotech. ro
e-mail: office@hpinfotech. ro
Project:
Version:
Date: 04.06.2005
Author: User
Company: OmGTU
Comments: Program for digital regulator for electrical drive with phase syncronization
Chip type: ATmega64
Program type: Application
Clock frequency: 8,000000 MHz
Memory model: Small
External SRAM size: 0
Data Stack size: 1024
*****************************************************/
#include <mega64. h>
#include <math. h>
float Td=0.014012,K=1;
float q0,q1,q2;
unsigned int T0,Tay,Tay2,OUT;
// External Interrupt 0 service routine
interrupt [EXT_INT0] void ext_int0_isr (void)
{
// Place your code here
T0=PINA;
T0=T0<<8;
T0=T0+PINB;
Tay2=Tay;
Tay=PINC;
Tay=Tay<<8;
Tay=Tay+PIND;
q0=K* (Td+T0);
q1=-K*Td;
q2=T0;
OUT= (q0/ (0,82*q2)) *Tay+ (q1/ (0,82*q2)) *Tay2;
PORTF=OUT; // выводим данные на выход микроконтроллера
PORTE=OUT>>8;
}
// Declare your global variables here
void main (void)
{
// Declare your local variables here
// Input/Output Ports initialization
// Port A initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PORTA=0x00;
DDRA=0x00;
// Port B initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PORTB=0x00;
DDRB=0x00;
// Port C initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PORTC=0x00;
DDRC=0x00;
// Port D initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PORTD=0x00;
DDRD=0x00;
// Port E initialization
// Func7=Out Func6=Out Func5=Out Func4=Out Func3=Out Func2=Out Func1=Out Func0=Out
// State7=0 State6=0 State5=0 State4=0 State3=0 State2=0 State1=0 State0=0
PORTE=0x00;
DDRE=0xFF;
// Port F initialization
// Func7=Out Func6=Out Func5=Out Func4=Out Func3=Out Func2=Out Func1=Out Func0=Out
// State7=0 State6=0 State5=0 State4=0 State3=0 State2=0 State1=0 State0=0
PORTF=0x00;
DDRF=0xFF;
// Port G initialization
// Func4=In Func3=In Func2=In Func1=In Func0=In
// State4=T State3=T State2=T State1=T State0=T
PORTG=0x00;
DDRG=0x00;
// Timer/Counter 0 initialization
// Clock source: System Clock
// Clock value: Timer 0 Stopped
// Mode: Normal top=FFh
// OC0 output: Disconnected
ASSR=0x00;
TCCR0=0x00;
TCNT0=0x00;
OCR0=0x00;
// Timer/Counter 1 initialization
// Clock source: System Clock
// Clock value: Timer 1 Stopped
// Mode: Normal top=FFFFh
// OC1A output: Discon.
// OC1B output: Discon.
// OC1C output: Discon.
// Noise Canceler: Off
// Input Capture on Falling Edge
TCCR1A=0x00;
TCCR1B=0x00;
TCNT1H=0x00;
TCNT1L=0x00;
ICR1H=0x00;
ICR1L=0x00;
OCR1AH=0x00;
OCR1AL=0x00;
OCR1BH=0x00;
OCR1BL=0x00;
OCR1CH=0x00;
OCR1CL=0x00;
// Timer/Counter 2 initialization
// Clock source: System Clock
// Clock value: Timer 2 Stopped
// Mode: Normal top=FFh
// OC2 output: Disconnected
TCCR2=0x00;
TCNT2=0x00;
OCR2=0x00;
// Timer/Counter 3 initialization
// Clock source: System Clock
// Clock value: Timer 3 Stopped
// Mode: Normal top=FFFFh
// Noise Canceler: Off
// Input Capture on Falling Edge
// OC3A output: Discon.
// OC3B output: Discon.
// OC3C output: Discon.
TCCR3A=0x00;
TCCR3B=0x00;
TCNT3H=0x00;
TCNT3L=0x00;
ICR3H=0x00;
ICR3L=0x00;
OCR3AH=0x00;
OCR3AL=0x00;
OCR3BH=0x00;
OCR3BL=0x00;
OCR3CH=0x00;
OCR3CL=0x00;
// External Interrupt (s) initialization
// INT0: On
// INT0 Mode: Rising Edge
// INT1: Off
// INT2: Off
// INT3: Off
// INT4: Off
// INT5: Off
// INT6: Off
// INT7: Off
EICRA=0x03;
EICRB=0x00;
EIMSK=0x01;
EIFR=0x01;
// Timer (s) /Counter (s) Interrupt (s) initialization
TIMSK=0x00;
ETIMSK=0x00;
// Analog Comparator initialization
// Analog Comparator: Off
// Analog Comparator Input Capture by Timer/Counter 1: Off
// Analog Comparator Output: Off
ACSR=0x80;
SFIOR=0x00;
// Global enable interrupts
#asm ("sei")
while (1)
{
// Place your code here
};
}