
Рефераты по авиации и космонавтике
Рефераты по административному праву
Рефераты по безопасности жизнедеятельности
Рефераты по арбитражному процессу
Рефераты по архитектуре
Рефераты по астрономии
Рефераты по банковскому делу
Рефераты по сексологии
Рефераты по информатике программированию
Рефераты по биологии
Рефераты по экономике
Рефераты по москвоведению
Рефераты по экологии
Краткое содержание произведений
Рефераты по физкультуре и спорту
Топики по английскому языку
Рефераты по математике
Рефераты по музыке
Остальные рефераты
Рефераты по биржевому делу
Рефераты по ботанике и сельскому хозяйству
Рефераты по бухгалтерскому учету и аудиту
Рефераты по валютным отношениям
Рефераты по ветеринарии
Рефераты для военной кафедры
Рефераты по географии
Рефераты по геодезии
Рефераты по геологии
Рефераты по геополитике
Рефераты по государству и праву
Рефераты по гражданскому праву и процессу
Рефераты по кредитованию
Рефераты по естествознанию
Рефераты по истории техники
Рефераты по журналистике
Рефераты по зоологии
Рефераты по инвестициям
Рефераты по информатике
Исторические личности
Рефераты по кибернетике
Рефераты по коммуникации и связи
Рефераты по косметологии
Рефераты по криминалистике
Рефераты по криминологии
Рефераты по науке и технике
Рефераты по кулинарии
Рефераты по культурологии
Дипломная работа: Программируемый таймер установки для подводного вытяжения позвоночника
Дипломная работа: Программируемый таймер установки для подводного вытяжения позвоночника
Введение
Заболевания позвоночника, среди которых основными являются остеохондроз и радикулит, являются широко распространенными у населения различного возраста. Высокие темпы урбанизации общества, стрессы, гипокинезия и низкая иммунологическая резистентность организма обусловливают тенденцию раннего начала и малозаметного прогрессирования болезней позвоночника. При несвоевременном и неграмотном лечении они быстро переходят в хронические и могут привести к острому болевому синдрому, существенному ограничению подвижности и явиться предпосылкой последующих морфологических изменений позвонков. Несмотря на наличие современных методов лекарственной терапии заболеваний позвоночника, появившихся в последние годы, восстановление его функции остается сложной задачей для неврологов. Это связано, в первую очередь, с необходимостью улучшения подвижности и микро циркуляции спинномозговых сегментов, что является предпосылкой надежного восстановления позвоночника. В данной работе рассматривается метод подводного вытяжения позвоночника с применением программируемого таймера и системы управления тракционной установкой. Особое внимание уделяется разработке программируемого таймера, как составной части системы управления вцелом.
1 Анализ существующих устройств и методов тракционной терапии
1.1 Медицинские аспекты проведения процедуры вытяжения позвоночника
Заболевания периферической нервной системы с временной утратой трудоспособности занимают одно из первых мест в общей структуре неврологических заболеваний. Одним из самых распространённых заболеваний этой системы является дегенеративное поражение позвоночника с неврологическими проявлениями, поражающее людей в наиболее трудоспособном возрасте[2].
Остеохондроз позвоночника – это хроническое системное заболевание организма, проявляющееся дегенеративно-дистрофическими нарушениями в соединительной ткани межпозвонкового диска.При дегенеративном процессе усиливается ферментативный распад (в частности, протеино-полисахаридов) в соединительной ткани на фоне нейрогуморальных нарушений. Гипоксические факторы развиваются одновременно, и в поражённом сегменте, и в соответствующем дерматоме. Нарушается кислотно – щелочное состояние и развивается ацидоз. Важное значение придают структуре гликозаминогликанов, от которых зависит прочность и эластичность межпозвонкового диска. Изучение роли ауто-иммунных реакций и патогенеза остеохондроза выявила наличие у этой группы больнах аутоаллергических реакций, приводящих к возникновению рецидивов, а также, к развитию реактивного воспалительного процесса в соединительно-тканных образованиях, окружающих изменённый диск. Обнаружено естественное старение межпозвонкового диска, наблюдающееся у здоровых лиц. К возрастным изменениям относят фибротизацию пульпозного ядра и гиалинизацию волокон фиброзного кольца, денатурацию коллагеновых волокон и их распад. Следствием этих дегенеративно-дистрофических изменений является потеря элластичности и прочности межпозвонкового диска и снижение его устойчивости к травмирующим факторам.
Основными механизмами возникновения клинических синдромов являются протрузии или проляпсы межпозвонковых дисков, гиппертрофия жёлтой связки, реактивное воспаление в эпидуральной клетчатки, стаз в венах корешков, и , наконец, нестабильность позвоночника.
При травме, инфекции, и действии ряда других эндогенных и экзогенных факторах возникает повреждение фиброзного кольца, чаще в его задней части, где оно тоньше, а задняя продольная связка прикреплена к телам позвонков значительно слабее чем передняя.[3]
Различают три степени патологического процесса в дисках:
1. Смещение пульпозного ядра кзади и выпячивание его в позвоночный канал с фиброзным кольцом;
2. Разрыв фиброзного кольца и частичное выхождение пульпозного ядра из межпозвонкового промежутка;
3. Утолщение жёлтой связки; диск при этом спаян с корешком и эпитдуральной клетчаткой.
Наиболее частое повреждение дисков поясничного отдела объясняется анатомо-физиологическими особенностями этой области: большой нагрузкой на эту часть позвоночника, подвижностью, косым положением суставов поясничных позвонков, узостью между l(4) – l(5) и l(5) – l (1) позвонками и массивностью корешков.
Принимая во внимание патогенетическую сложность и многообразие неврологических проявлений, необходимо при постановке диагноза учитывать патогенез заболевания ( остеохондроз, выбухание, грыжа диска, ишемия и т.д. ), течение, стадию заболевания и выраженность болевого синдрома. Согласно классификации проблемной комиссии «Заболевания периферической нервной системой», различают :
1. Рефлекторные синдромы.
· Люмбаго – прострел, острые боли в пояснице.
· Люмбалгию – умеренно выраженные боли в поясничной области, появляющиеся при стоянии, поворотах, сгибании.
· Люмбоишиалгию – боли в пояснице и по задней поверхности ноги постоянные, периодически обостряющиеся, с мышечно-тоническими, вегетативно-сосудистыми и нейро-дистрофическими нарушениями (синдромы: грушевидной мышцы, кокцигодинии и т.д.
2. Корешковые синдромы – боли в пояснице и ноге в соответствии с зоной поражённого корешка или нескольких корешков. Объективно отмечается изменение конфигурации позвоночника (сколиоз, кифоз, уплощение поясничного лордоза), напряжение длинных мышц спины, выраженные в различной степени симптомы натяжения (Ласега, Вассермана, Мацкевича и др.), нарушение преимущественно ахилловых рефлексов, понижение поверхностной болевой чувствительности в зоне иннервации поражённых корешков. При поражении пятого поясничного корешка: боль в ягодичной области, наружной поверхности бедра, голени , стопы, с нарушением чувствительности в той же зоне, повышение (или понижение) коленного и ахиллова рефлексов, похудание мышц голени, слабость первого пальца. При поражении первого крестцового корешка: боль и расстройство кожной чувствительности по задне-наружной поверхности бедра, голени, наружному краю стопы, снижение или исчезновение ахиллова рефлекса, снижение силы мышц сгибателей пальцев (особенно первого), атрофия ягодичной мышци. Сравнительно реже встречается поражение четвёртого поясничного корешка, которое наблюдается при изменениях третьего поясничного диска: боль в паховой области, передне-наружной поверхности бедра и по втнутренней поверхности голени. В этой же области нарушена кожная чувствительность. Выявляется расстройство коленного рефлекса, снижение мышечного тонуса вплоть до атрофии четырёхглавой мышци бедра. Чаще встречается сочетание поражения нескольких корешков или преимущественно одного спинального корешка.
3. Сосудистые корешково-спинальные синдромы. Радикуломиелоишемия, миелоишемия (артериальная или венозная, стойкая, преходящая)
По степени выраженности различают слабовыраженный, умеренно и резковыраженные болевые синдромы. Течение заболевания может быть прогрессирующем, стационарным, рецидивирующим, регрессирующим. В случае ремиттирующего течения нужно учитывать стадию процесса: обострение, обратное развитие (или подострое), неполная ремиссия, ремиссия. Стадия течения заболевания отражает тяжесть болезни в данный момент.
Острая стадия заболевания характеризуется сильнейшими болями, резкими симптомами натяжения; больной не в состоянии себя обслужить. В этой стадии бальнеофакторы не применяют.
При подострой стадии остаются интенсивными боли, значительные ограничения объёма движения в поясничной области, вынужденное положение тела, симптомы натяжения выражены несколько меньше чем в стадии обострения, больной может встать с постели, но хотьба затруднена из-за усиления болей, работу выполнять не может. Стадия неполной ремиссии – боли умеренные, иногда непостоянные, нерезкие симптомы натяжения, ограничения объёма движения в поясничной области может быть значительным, сохраняется вынужденная анталгическая поза, больной может себя обслужить; трудоспособность ограничена, особенно у лиц физического труда.
Стадия ремиссии характеризуется нерезкими периодически возникающими болями, отсутствием симптомов натяжения, вынужденным положением корпуса и небольшим ограничением объёма движения в поясничной области, трудоспособность не ограничена.
Сложность патогенеза и разнообразие неврологических проявлений поясничного остеохондроза предполагают комплексный метод лечения больных с включением ряда ортопедических мероприятий, в том числе вытяжение позвоночника.
Вытяжение приводит к увеличению межпозвонковых пространств, разгружает поражённый диск, обеспечивает постепенное вправление грыжи, ликвидирует подвывихи межпозвонковых суставов, приводит к декомпрессии нервных структур, улучшает условия кровообращение, уменьшает отёк, ликвидирует реактивные явления в тканях, прекращает нагрузку на ось позвоночника, создаёт условия для рубцевания трещин и разрывов фиброзного кольца.
Подводное вытяжение позвоночника имеет свои преимущества, так как к механическому вытяжению позвоночника присоединяется влияние тёплой водной среды, способствующей снижению мышечного тонуса, релаксации тканей и уменьшение интенсивности болевого синдрома. Тёплая вода блокирует поток патологических импульсов, ликвидирует временные связи, патологический характер которых обусловлен рефлекторным механизмом (парабиотическое состояние тканей, ангеоспазм, венозный стаз)
Эффект от вытяжения большой. Тракция помогает больным с дископатией, которые исчерпали все виды консервативного лечения.
'Вертикальное подводное вытяжение позвоночника, предложенное К. Моллем (1953), широко применяют как в виде самостоятельного метода, так и в сочетании с физическими факторами. Его также проводят в минеральных водах различного химического состава. Учитывая недостаточную эффективность вытяжения в пресной воде, что связано, по-видимому, с ее малой релаксирующей способностью.
Разработанный нами метод сочетанного воздействия на мышечно-суставной аппарат вытяжением и душем-массажем в оптимальном режиме приводит к улучшению периферического кровообращения (по данным термометрических исследований и реовазографических). Наблюдается нормализация функционального состояния нервно-мышечного аппарата, о чем свидетельствует увеличение биоэлектрической активности мышц пораженной ноги (по показателям электромиографии) и изменение как пластического тонуса — показателя остроты патологического процесса, так и контрактильного тонуса — показателя мышечной силы.
Улучшение периферического кровообращения, нормализация измененного функционального состояния мышц обеспечивают максимум их релаксации и связанный с ней эффект растяжения, декомпрессию нервно-сосудистых образований и высокий терапевтический результат.[1]
Разработана лечебная методика подводного вертикального вытяжения позвоночника с гидромассажем длинных мышц спины поясничной области. Установлен оптимальный режим температуры воды и давления гидромассажа. Сочетанное применение подводного гидромассажа с вертикальным вытяжением в оптимальной экспозиции повышает эффективность лечения.
Вытяжение проводят в бассейне глубиной не менее 2 м с пресной водой, можно проводить в контрастных ваннах. (Подробнее о методах вытяжения позвоночника см. в п. 1.2.)
В устройстве для проведения подводного вертикального вытяжения позвоночника, расположенного на стене бассейна и состоящего из рамы, подлокотников и опор для ног, вмонтированы вертикальные трубки, шарнирно соединенные с рамой, что позволяет перемещать их по высоте, расстоянию от тела больного, а также изменять угол наклона струн. В трубках просверлены сопловые отверстия диаметром 2 мл на расстоянии 3 см друг от друга в количестве 20.
Больного укрепляют в устройстве для вытяжения с помощью матерчатых корсетов, одеваемых на грудную клетку и область таза, последний из которых тросами через блоки соединен с аппаратом для вытяжения позвоночника. Предплечья больного упираются на подлокотники. С помощью рукоятки производят перемещение трубок так, чтобы сопловые их отверстия оказались расположенными параллельно разгибателям туловища поясничной области на расстоянии 2—3 см. Необходимое давление для проведения Душа-массажа создастся с помощью аппарата «Тангентер», через который поступает горячая вода температуры 45—50°С из водопроводной сети.
Подводное вертикальное вытяжение позвоночника проводят в пресной воде с температурой 36—37°С. Вытяжение начинают с небольшой нагрузки — 5 кг, которую при хорошей переносимости больного при последующих процедурах увеличивают па 2,5—5 кг и повторяют каждую величину нагрузки ' 2—3 раза, доводя к концу лечения до 20—25 кг.
Скорость нарастания нагрузки и максимальная ее величина зависят от клинических особенностей заболевания, выраженности болевого синдрома и статико-динамических нарушений.
При подострой стадии заболевания с умеренно выраженным и выраженным болевым синдромом увеличение нагрузки проводят более постепенно, прибавляют не более чем 2—2,5 кг и ограничивают максимальную величину нагрузки 15—20 килограммами.
При слабо выраженном болевом синдроме величину нагрузки можно увеличивать на 5 кг через каждые 3 процедуры н доводить ее до 25 кг. Аналогичным образом проводят вытяжение больным с выраженными изменениями конфигурации позвоночника (сколиоз, кифоз, кифосколиоз), но при слабо выраженном болевом синдроме.
Женщинам назначают меньшую величину нагрузки (15— 20 кг) по сравнению с мужчинами (20—25 кг).
В случае усиления болевого синдрома в процессе лечения величину нагрузки снижают и вновь увеличивают после уменьшения боли.
При появлении парестезии, онемения, боли в пораженной конечности в момент проведения процедуры лечение вытяжением прерывают.
Эффект от лечения наступает после 6—8-й процедуры и отчётливо проявляется к 10—12-й, после чего целесообразно снижать величину нагрузки до исходной величины.
В течение вытяжения больному одновременно проводят душ-массаж поясничной области водой температуры 45—50°С, под давлением струи воды, начиная от 0,5, и доводят до 1,5—2 атм. Продолжительность процедуры 15 мин. Лечение проводят через день или два дня подряд с последующим днем перерыва, на курс лечения 14—16 процедур.
Сразу после вытяжения для иммобилизации позвоночника больной одевает корсет (или пояс штангиста) или бинтуют его 5—10 метрами льняного полотна (шириной до 50 см), после чего больной отдыхает в горизонтальном положении не менее часа. На протяжении всего курса лечения, а затем после него в течение 1,5—2 месяцев больному рекомендуют спать на жесткой постели (па щите, подложенном под поролоновый или ватный матрац) и носить корсет. Корсет или пояс иммобилизирует позвоночник, снижает нагрузку на диски и корешки, фиксирует его в «растянутом» положении.
При появлении рецидива заболевания среди прочих мероприятий, направленных на восстановление здоровья, необходимо рекомендовать ношение пояса-корсета.
Указанный метод лечения можно назначить в стационарных и амбулаторных условиях. В период лечения необходимо исключить большую физическую нагрузку, резкие движения, охлаждение и др.
Метод подводного вытяжения позвоночника должен являться частью комплексного лечения, включающего методы аппаратной терапии, лечебной гимнастики и массажа. При выраженном болевом синдроме вытяжение следует начинать после нескольких физико-терапевтических процедур (УЗ, СМТ, УФО), которые обеспечивают уменьшение болевого синдрома.
Показаниями к проведению процедуры вытяжения позвоночника являются следующие болезни: люмбалгия, люмбоишиалгия, радикулярные синдромы, обусловленные дегенеративным процессом в межпозпонковых дисках (выбуханием диска) в стадии обратного развития и стадии неполной ремиссии со статико-динамическими нарушениями (ограничение объема движений в поясничном отделе позвоночника, сколиоз, кифосколиоз, напряжение длинных мышц спины, уплощение лордоза и т. д.), со слабо н умеренно выраженным болевым синдромом.
Противопоказана процедура вытяжения позвоночника при грыже межпозвонкового диска, сосудистых корешково-спинальных синдромах (радикуломиелоишемия, миелоишемия), воспалительных спинальных синдромах (арахноидит, рубцово-спаечный эпидурит). Острая (обострение) стадия с выраженным и резко выраженным болевым синдромом. Сопутствующие заболевания брюшной полости: холецистит, язвенная болезнь желудка и двенадцатиперстной кишки, почечно- и желчно-каменная болезнь, опущение почек, рубцовые процессы после операций на органах брюшной полости. Специальные противопоказания к применению водолечения.
1.2 Техника проведения процедуры и методики вытяжения позвоночника в воде
Подводное вертикальное вытяжение позвоночника [5]. Эту процедуру проводят в специальном бассейне или другой емкости. Матерчатый пояс с грузом вначале 2-5 кг надевают на тазовую область больного. Опираясь в бассейне на подлокотники и головодержатель, он пребывает в нем в течение 20 - 40 мин. Груз постепенно индивидуально увеличивают до 25-35 кг. На курс лечения до 15 процедур.
Вытяжение на горизонтальной плоскости по В. А. Лисунову (рисунок 1.1). Головной конец тракционного щита крепят к головному борту ванны, а ножной остается незакрепленным, что позволяет значительно изменять угол наклона щита. При необходимости вытяжения поясничного отдела позпоночника больного укладывают на щит. На нижнюю часть его грудной клетки накладывают лиф из прочной ткани. Лямки лифа припязыпают к скобам у головного конца щита. На таз больного накладывают полукорсет. Пода не должна покрывать грудь больного. К лямкам полукорсета с помощью металлических тросиков, переброшенных через систему блоков, за бортом ванны подпешива-ют груз. Вытяжение начинают с груза 5 кг, затем п течение 4-5 мин груз увеличивают до 10-15 кг. В конце процедуры фуз уменьшают постепенно до 0. При последующих воздействиях силу тяги увеличивают на 5 кг и к 4 - 5-й процедуре доводят до 25 - 30 кг. Продолжительность процедуры 20 - 40 мин, затем отдых на горизонтальной или с приподнятым головным концом кушетке 1-1,5 ч. На курс лечения 10-12 процедур.
При необходимости вытяжения шейного отдела позвоночника голову больного фиксируют петлей Глиссона. При этом применяют меньший груз и уменьшают длительность процедуры. При первой процедуре используют груз 5 кг, в последующем с каждой процедурой его увеличивают и доводят до 12-15 кг. Продолжительность процедуры вначале 8-10 мин, затем-до 12-15 мин. На курс лечения до 10- 12 процедур.
Вытяжение (провисание) под влиянием собственного веса тела по В.Б.Киселеву (рисунок 1.2). Осуществляется путем фиксации плечевого пояса больного при помощи кронштейна, укрепленного на борту головного конца ванны. Ноги в области голеностопных суставов с помощью манжет и бинта фиксируют у противоположного торца ванны. Средняя часть туловища в таких условиях провисает, обуславливая растяжение в поясничном отделе позвоночника. При наличии болей используют щадящую методику (через день сначала по 5 мин, затем по 10 мин). На курс лечения 10-20 процедур.
Вытяжение позвоночника по Пушкарёвой-Воздвиженской. Сочетает в себе элементы провисания и дозированной нагрузки в воде ванны. Происходит растяжение поясничного отдела позвоночника в противоположных направлениях с помощью двух корсетов из плотной ткани, наложенных на грудной отдел и область таза. Процедуру проводят в ванне размером 200х65х70 см.
Нагрузку осуществляют с помощью специального автоматического гидравлического аппарата, обеспечивающего постепенное нарастание и сброс нагрузки. Вытяжение начинают с нагрузки 10 кг (2-3 процедуры), постепенно груз увеличивают на 2 - 5 кг.
Вытяжение по данной методике проводят не только в пресной воде, но и в минеральных водах, отпуская первые 1-2 ванны без вытяжения (входные ванны). Различный тепловой эффект разной по физико-химическому составу воды ванн, а также неоднозначная релаксация мышц в них требуют разной нагрузки при их проведении. Вытяжение позвоночника в сульфидных ваннах проводят при концентрации сероводорода в воде 3 - 4,5 ммоль/л (100-150 мг/л) и температуре 36-37 "С. Продолжительность ванны 10-15 мин, нагрузка от 10 до 30 кг. Проводят процедуры 3-4 рада в неделю; на курс лечения 12-14 процедур.
Вытяжение позвоночника в радоновых ваннах проводят при содержании радона в воде 1,5-4,5 ммоль/л (80-120 нКи/л) и температуре воды 36-37 "С. Продолжительность ванны 15-20 мин, нагрузка 10-20 кг. Проводят процедуры 3—4 раза в неделю; на курс 14—16 ванн.
Вытяжение позвоночника в хлоридных натриевых ваннах проводят при концентрации 20 - 40 г/л и температуре 36-37 °С. Продолжительность ванны 20 мин, нагрузка 10-25 кг. Применяют ванны 4-5 раз в неделю; на курс 10-16 процедур.
Вытяжение позвоночника в скипидарных ваннах (из белой эмульсии или желтого раствора скипидара) начинают (первые 2-3 процедуры) с концентрации 5-20 мл на 200 л воды, постепенно увеличивая ее (по 5 мл) и доводя до 60 мл на 200 л воды. Температура воды 37 - 38°С. Процедуры продолжительностью 15-25 мин проводят 3-4 раза в неделю; на курс лечения 14-15 процедур. Вытяжение позвоночника в пресной воде проводят при температуре 36-37 °С.
Продолжительность процедур до 30 мин, нагрузка 10-20 кг. Применяют панны 4-5 раз в неделю; на курс лечения 20 процедур.
Вертикальное вытяжение позвоночника в воде в сочетании с подводным душем-массажем. Больного, на грудную клетку и область таза которого надеты корсеты из плотной ткани, закрепляют в специальной установке (рисунок. 1.4), помещенной в бассейне (глубиной не менее 2 м) с пресной водой температуры 36-37 °С. Начинают с небольшой нагрузки (5-10 кг), которую постепенно увеличивают на 2,5-5 кг, доводя к концу лечения до 20-25 кг. В течение вытяжения больному одновременно проводят душ-массаж температуры 45-50°С; давление струи воды 150-200 кПа (1,5-2 ат) создается при помощи «Тангенсора». Процедуры продолжительностью 15 мин проводят через день или 2 дня подряд с перерывом на 3-й день; на курс лечения 12-14 процедур.
1.3 Современные установки для подводного вытяжения позвоночника
Среди изученных в процессе патентного поиска установок, особое внимание заслуживают те установки, которые имеют в своём составе систему управления нагрузкой.[4] Установка (рисунок 1.5) содержит фиксаторы 1 и пояс 2 пациента, трос 3, направляющие ролики 4, рычаг 5, груз 6, установленный на каретке 7 с реверсивным приводом, и пульт управления 10. Вдоль рычага 5 установлены герконы, на каретке - постоянный магнит 16, а на пульте управления - переключатели времени изменения нагрузки и ее амплитуды. Оба переключателя включены в цепь управления скоростью привода. Груз соответствует максимальной амплитуде нагрузки. В приводе может быть использован двигатель постоянного тока, либо шаговый двигатель. Установка применяется при вертикальном вытяжении в бассейне, либо при горизонтальном вытяжении в ванне, снабженной щитовым ложем. Установка работает следующим образом: Пациент помещается на основание 26 в ванной 25, на нём закрепляется фиксатор 1 и пояс 2. Медсестра устанавливает Параметры процедуры при помощи переключателей на передней панели. После нажатия кнопки «Пуск» начинается процедура. Устройство управления изменяет нагрузку посредством шагового двигателя 9, редуктора 34, винта 8, перемещает каретку 7 с грузом 6 относительно опоры 35 рычага 5. Положение груза оценивается при помощи герконов 15,14,13,12. Система позволяет без применения датчика усилия достаточно точно устанавливать предварительно рассчитанную величину нагрузки.
Конструкция установки позволяет легко регулировать время нагрузки, её амплитуду, скорость изменения при помощи одного шагового двигателя. На передней панели прибора для управления установкой расположены соответствующие органы управления, которые позволяют выставить время, в течение которого будет происходить изменение нагрузки; время, в течение которого нагрузка остаётся постоянно; амплитуду нагрузки.
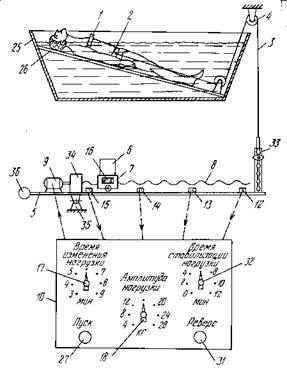
Рисунок. 1.5- Установка для подводного вытяжения позвоночника
Установка (Рисунок.1.6) содержит фиксаторы 1 и пояс 2 пациента, трос 3 с направляющими роликами 4 и блок управления, в который введены присоединенный к тросу 3 датчик усилия 5, программный задатчик 6 с постоянным запоминающим устройством 13, табло и клавиатурой для задания параметров процедуры медсестрой, регулятор нагрузки (выполненный на базе микропроцессора) и пневматический сервомотор с золотником. Датчик усилия и программный задатчик 6 подключены к регулятору 7, выход регулятора связан с золотником сервомотора 8, а к штоку поршня сервомотора присоединен конец троса 3.
Установка имеет микропроцессорное устройство управления величинами нагрузки и временными параметрами, система имеет датчик усилия натяжения при помощи которого в системе осуществляется обратная связь. Устройство усложнено применением пневмопривода.
Установка работает следующим образом: Пациент помещается на основание 31 в ванне 30. На теле пациента закрепляются фиксатор 1 и пояс 2. Медсестра-оператор устанавливает режимы работы установки: Амплитуду нагрузки, скорость изменения нагрузки, время процедуры при помощи клавиш 22, 23, 24, 25. После нажатия кнопки «Пуск» (22) Начинается цикл процедуры. Все параметры процедуры, как при их установке, так и во время процедуры, отображаются на семисегментных индикаторах, причём время до конца процедуры и текущая величина нагрузки отображаются отдельно от установленных оператором величин. Микропроцессорное устройство управляет реле 29 золотника пневмопривода и открывает его в случае, когда необходимо снять нагрузку. Подача нагрузки осуществляется через управляемый устройством управления 7 поршневой цилиндр 9, посредством перемещения штока и подачи тем самым сжатого воздуха в одну из частей рабочего цилиндра 8.
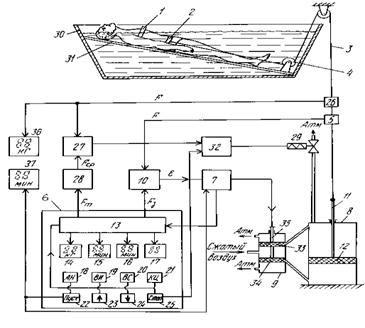
Рисунок 1.6 - Установка для подводного вытяжения позвоночника
Устройство (рисунок 1.7) предназначено для обеспечения равномерного дифференцированного приложения растягивающей силы к позвоночнику при упрощении отпуска процедур и может быть использовано в физиотерапии для профилактики и лечения заболеваний позвоночника при подводном вытяжении. На раме установлен узел фиксации плечевого пояса в виде двух подмышечников на горизонтальных направляющих. Головодержатель размещен на вертикальных направляющих, закрепленных на раме, оснащен противовесом и состоит из двух частей - затылочной и подбородочной. Секторы взаимодействуют с регулировочным винтом, установленным на основание. Подбородочная часть размещена на двух горизонтальных направляющих, закрепленных на затылочной части. Концы опоры подбородка дугообразной формы шарнирно закреплены на подбородочной части, а середина взаимодействует с регулировочным винтом. Механизм нагружения закреплен на раме и выполнен в виде самостопорящейся лебедки с динамометром. Трособлочная система состоит их двух тросов, связанных уравновешивающим блоком, причем один из них прикреплен к самостопорящейся лебедке, а другой проходит через кронштейны с роликами, установленные на раме, и обеими прикреплен к тазовому поясу. Подковообразная накладка затылочной части, накладки опоры подбородка и подмышечников выполнены из эластичного материала, стойкого к воздействию воды и дезинфицирующих растворов, причем опорная поверхность подмышечников выполнена в виде дуги окружности, обращенной вогнутой частью вниз, при этом по середине направляющих узла фиксации плечевого пояса закреплен гидромассажер, выполненный в виде центральной трубы с отходящими от нее в противоположные стороны попарно слепыми патрубками, расположенными перпендикулярно центральной трубе и лежащими с ней в одной плоскости, а тазовый пояс оснащен поплавками. Раздельная фиксация при вытяжении как шейного, так и нижнегрудного и поясничного отделов позвоночника обеспечивает приложение к ним растягивающей силы оптимальной величины.
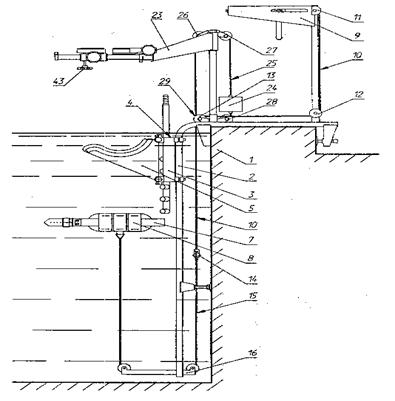
Рисунок 1.7 - Установка для вертикального подводного вытяжения позвоночника.
2. Разработка структурной схемы программируемого таймера для установки подводного вытяжения позвоночника
Система построена на базе однокристальной микроЭВМ МК51. В состав устройства входят датчики, электродвигатели, клапана. Предполагается применение трёх видов датчиков:
- Датчик температуры – предназначен для измерения температуры воды в бассейне для последующего автоматического поддержания её на заданном уровне.
- Датчик усилия – предназначен для измерения усилия растяжения, прикладываемого к пациенту.
- Датчик уровня – предназначен для измерения уровня воды в бассейне
Устройство содержит следующие узлы:
Коммутатор – предназначен для последовательного, разделённого во времени опроса каждого из датчиков и позволяет упростить схему, ограничившись применением одного АЦП.
АЦП – аналагово-цифровой преобразователь, предназначен для преобразования сигнала датчика, в данный промежуток времени подключённого к АЦП через Коммутатор, в цифровой код.
ЖК Модуль – Устройство на жидких кристаллах, отображающее информацию о режимах процедуры.
Дешифратор – предназначен для коммутации устройств, управляемых системой.
К1, К2, К3 – гидроклапаны с электроприводом для регулирования и подачи горячей, холодной воды и слива её из бассейна.
УС – устройство сопряжения, преобразующее цифровой сигнал с контроллера в необходимые управляющие сигналы.
Шаговый двигатель – двигатель, привод которого регулирует нагрузку.
Регуляция усилия растяжения, прилагаемого к пациенту осуществляется с помощью шагового двигателя. Включение подачи горячей и холодной воды, а также, слив воды осуществляется гидроклапанами открывание и закрывание которого осуществляется электрическим приводом. В качестве устройства отображения предполагается использование готового ЖК-модуля со встроенным контроллером. Устройство работает следующим образом: при включении установки устройство, снимает показания датчика уровня и если бассейн пуст, то открывает гидроклапаны подачи холодной и горячей воды. Когда уровень воды достигнет датчика температуры, устройство контролирует температуру воды и регулирует её подачу таким образом, чтобы температура сохранялась постоянной заданной заранее (обычно 37°С). При достижении воды уровня наполнения, наполнение прекращается и система переходит в режим поддержания температуры и объёма воды. После закрепления поясов больного оператор выставляет время и режим работы устройства (скорость изменения нагрузки, диапазон нагрузок и т.д.). По окончании процедуры, нагрузка снимается с пациента. Для интерфейса с оператором используется простейшая клавиатура и ЖК-модуль. Удобство интерфейса будет определятся в значительной степени программным обеспечением. Для возможности быстрого изменения конструкции с целью добавления дополнительных датчиков а также средств регулировки воздействия, датчики и потребители подключены при помощи коммутирующих схем на базе дешифраторов.
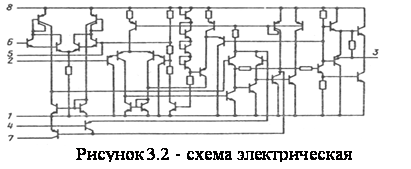
3 Разработка схемы электрической принципиальной
3.1 Разработка схемы электрической принципиальной программируемого таймера в составе устройства управления тракционной установкой
Подбор электронных компонентов схемы производится, на основе разработанной структурной схемы устройства. Программируемый таймер является неотъемлемой составной частью устройства управления установкой подводного вытяжения позвоночника. В данной главе основное внимание сконцентрировано на разработке цифровой части электрической схемы устройства. Основу устройства управления составляет однокристальная микроЭВМ КР1816ВЕ751, имеющая в своём составе репрограммируемое постоянное запоминающее устройство (ПЗУ).
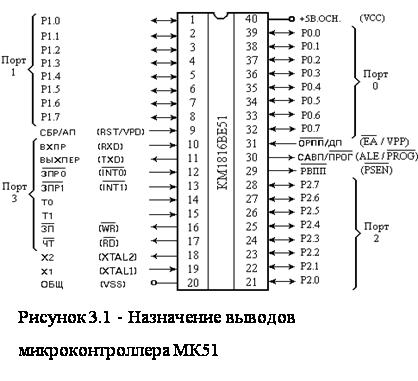
ОМЭВМ, назначение выводов которой представлено на рисунке 3.1 состоит из следующих основных функциональных узлов: блока управления, арифметико-логического устройства, блока таймеров/счетчиков, блока последовательного интерфейса и прерываний, .программного счетчика, памяти данных и памяти программ. Двусторонний обмен информацией между функциональными блоками осуществляется с помощью внутренней 8-разрядной магистрали данных. Разряды порта 3 микроконтроллера имеют двойную функцию, в зависимости от установленных режимов работы. Порт 3 может функционировать как обыкновенный параллельный 8-разрядный интерфейс, либо позволяет организовывать последовательный канал обмена данными и систему прерываний от внешних устройств, причём существует возможность задавать режим работы каждого разряда порта 3 в отдельности.
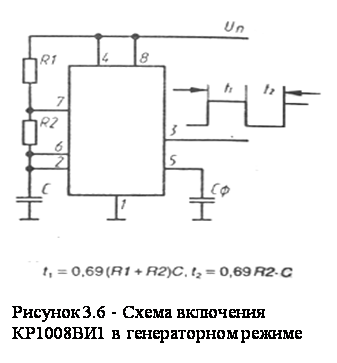
В устройстве управления использована возможность организации обработки прерывания от внешнего устройства для отсчёта секундных интервалов времени, что позволило сэкономить программную память и сосредоточить внимание программы на обработку показаний датчиков и работу с ЖК модулем. Для отсчёта секундных интервалов используется микросхема-таймер КР1008ВИ1 (рисунок 3.2), позволяющая задавать RC-цепочкой временные параметры генерируемого сигнала. Несмотря на отсутствие в схеме таймера кварцевого резонатора, RC-цепочка даёт стабильные колебания с достаточной для отсчёта времени процедуры точностью.
Устройство оснащено датчиками температуры, усилия растяжения, уровня жидкости. В данном проекте не рассматриваются цепи подключения датчиков к аналогово-цифровому преобразователю (АЦП) и
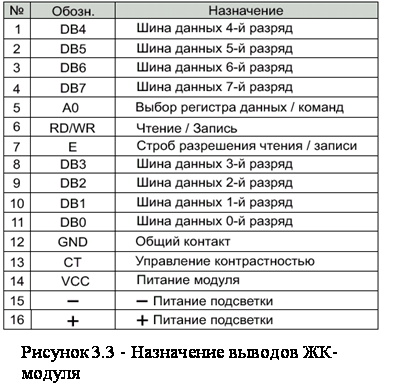
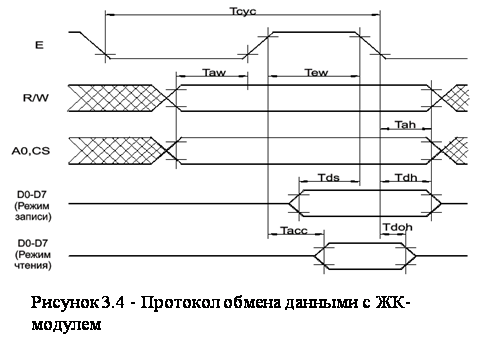
предусилительные схемы, ввиду наличия широкой номенклатуры изготавливаемых сенсоров, в том числе и со встроенными предусилителями сигнала. Схема устройства управления включает в себя систему сбора данных, построенную на одной микросхеме КР572ПВ4. Микросхема имеет 8 аналоговых входов и осуществляет последовательно преобразование по каждому из них. Аналоговый сигнал преобразуется в 8-значное двоичное число. Коэффициент нелинейности не более 0.3% Каждому аналоговому каналу соответствует ячейка оперативной памяти. Считывание данных может происходить асинхронно с получением результатов преобразования. Данный АЦП позволяет «оцифровывать» сигнал с напряжением до 2.5В. На полный цикл преобразования по всем восьми каналам требуется :не более 256 мкс, при тактовой частоте 2.5 Мгц. Ввиду того что в разрабатываемом устройстве нет необходимости в быстроте преобразования, скорость преобразования не имеет особого значения. Тактовым генератором для микросхемы сбора данных является таймер КР1008ВИ1. Для отображения информации применён ЖК-модуль MT-12S2-1 .(LCD) Данное индикаторное устройство позволяет отображать как цифровую так и символьную информацию. Размер экрана 2х12 символов при матрице символа 5х8. ЖК-модуль имеет встроенный контроллер управления экраном, аналогичный SED1520DOA фирмы SEIKO EPSON. Шина данных модуля имеет восемь разрядов. Назначение выводов ЖК-модуля (рисунок 3.3) и протокол обмена данными с ним показаны (рисунок 3.4) будут затронуты подробнее при разработке алгоритма программы.
В состав системы включена клавиатура, состоящая из четырёх клавиш.
Интерфейс с опреатором предполагается организовать в режиме выбора пунктов меню и изменения установленных по умолчанию значений.
 Исполнительная часть
схемы состоит из трёх клапанных механизмов, положением клапанов которых
управляет электромагнитный привод,
Исполнительная часть
схемы состоит из трёх клапанных механизмов, положением клапанов которых
управляет электромагнитный привод,
показанный на схеме катушками L1, L2, L3 (рисунок 3.5). Клапанные механизмы предназначены для управления подачей горячей и холодной воды в ванную, а также слива воды после процедуры. Устройство, ввиду того, что имеется датчик температуры, имеет возможность контроля температуры воды и поддержания её постоянной . Датчик уровня позволяет организовать слежение за уровнем воды при наполнении ванны и подачи горячей воды для поддержания постоянной, комфортной для тела температуры.
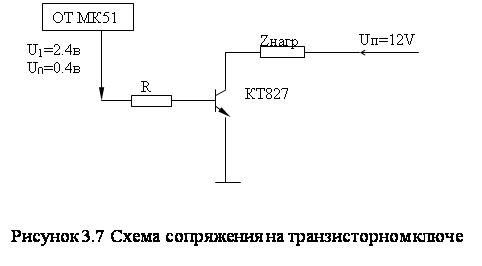
Для изменения усилия воздействия в системе предусмотрен шаговый двигатель. (M). Задача по формированию управляющих импульсов для шагового двигателя возложена на микроконтроллер, что позволило упростить электрическую схему. Кинематическая схема изменения нагрузки, приведенная на рисунке 1.5 взята за основу, как наиболее простая и эффективная по моему мнению. Для контроля усилия натяжения предусмотрен датчик усилия натяжения, установленный на передающем усилие тросу.
В качестве схемы сопряжения между силовыми приводами и микроконтроллером, выбраны транзисторные ключи на составных транзисторах (VT1-VT7) КТ827 большой мощности и с большим коэффициентом усиления. В транзисторных ключах на выходе, параллельно с нагрузкой установлены диоды VD1-VD7 для шунтирования напряжения индукции, неизбежно возникающего на обмотках электромагнитного механизма при движении ротора или якоря реле.
Ориентировочный рассчёт времязадающих цепей, транзисторных ключей приведен в разделе 3.2.
Все микросхемы устройства функционируют при напряжении +5В, однако для микросхемы АЦП необходимо опорное напряжение +2.5В. Разрабатываемое устройство имеет в своём составе блок питания с источником стабилизированного напряжения +2.5В. Ввиду небольшой потребляемой мощности устройства, схема блока питания состоит из трансформатора с выходными напряжениями 5В, 12В, 36В. В её состав также входят диодные мосты для двухполупериодного выпрямления тока питания и конденсаторы для сглаживания пульсаций. Опорное напряжение стабилизируется при помощи интегрального стабилизатора на микросхеме КР142ЕН10. (DD1) Выходное напряжение задаётся при помощи резисторного делителя. Расчёт блока питания приведен в разделе 3.3.
Расчёт номиналов элементов системы управления установкой подводного вытяжения позвоночника.
 Рассчёт необходимо
начать с времязадающих цепей таймеров КР1008ВИ1 (DD2,DD4) . (рисунок
3.6)
Рассчёт необходимо
начать с времязадающих цепей таймеров КР1008ВИ1 (DD2,DD4) . (рисунок
3.6)
 (3.1)
(3.1)
Т.к. питание микросхемы +5В, то на значение номиналов резисторов налагаются следующие ограничения:
![]() (3.2)
(3.2)
Начнём рассчёт с рассчёта таймера, задающего секундные интервалы.
Зададимся значением суммы R1+R2=2Мом. Тогда получим:
![]() (3.3)
(3.3)
Из ряда Е12 (см. приложение B) выбираем значение С=0.68мкф.
Прерывание от таймера будет вызываться по переходу сигнала на входе микроконтроллера из 1 в 0, т.е по срезу.
Найдём значение R2 из (3.1) приняв значение t2=0.001c.
![]() (3.4)
(3.4)
Из ряда Е12 выберем 2,2 Ком.
Рассчитаем R1 из (3.1)
![]() (3.5)
(3.5)
Рассчитаем таймер, генерирующий тактовые импульсы для микросхемы АЦП. При работе таймера на частоте 2,5Мгц, время преобразования по каждому из каналов составляет 32мкс. Таймер КР1008ВИ1 имеет возможность генерировать импульсы длительностью не менее 20мкс, что соответствует частоте:
![]() (3.6)
(3.6)
при такой частоте тактовых импульсов скорость преобразования по каналу составит:
![]() (3.7)
(3.7)
Рассчитаем параметры времязадающих цепей таймера, генерирующего тактовые импульсы для АЦП.
![]() (3.8)
(3.8)
Выберем из ряда Е12 значение C=15пф
Рассчитаем значение резистора R2 по формуле 3.2.4:
![]() (3.9)
(3.9)
Выберем из ряда Е12 значение R2=1.8Мом
По формуле (3.5) рассчитаем значение R1
![]() (3.10)
(3.10)
Результаты рассчётов с учётом обозначений элементов по схеме электрической принципиальной приведены в таблице 3.1
Таблица 3.1 - Номиналы рассчитанных элементов
Элемент |
Номинал |
Тип элемента |
R1 |
2.2Мом |
С2-23-0,125 |
| R2 | 2,2Ком | С2-23-0,125 |
| R3 | 8,2Ком |
С2-23-0,125 |
| R4 | 3,3Ком | С2-23-0,125 |
| R5 | 1,8Мом | С2-23-0,125 |
| R6-R12 | 820 Ом | С2-23-0,125 |
| C1 | 0,68мкф |
КМ |
| C2 | 0,1мкф | К21У-2 |
| C3 | 30пф | К21У-2 |
| C4 | 30пф | К21У-2 |
| C5 | 10мкф | К50-6 |
| C6 | 15пф | К21У-2 |
| C7 | 0,1мкф | К21-9 |
Номиналы резистора R3 и конденсаторов C3,C4,C5 взяты, как типовые для времязадающей цепочки микроконтроллера МК51. Произведём рассчёт коммутирующего транзисторного ключа для схемы управления шаговым двигателем. Типовые параметры шагового двигателя небольшой мощности приведены в таблице 3.2
Таблица 3.2 - Параметры шагового двигателя
| Параметр | Значение |
| Кол-во полюсов ротора | 50 |
| Коэффициент объединения | 0,121 В*рад-1*сек |
| Инерция ротора | 1,16*10-5кг*м2 |
| Сопротивление обмотки статора | 0,66 Ом |
| Индуктивность обмотки статора | 1,52*10-3Гн |
| Номинальный ток обмотки статора | 2А |
Для рассчёта примем номинальный ток каждой из обмоток шагового двигателя равным 2А. Схема представлена на рисунке 3.7
Для рассчёта потребуются следующие данные:
H21=750..18000
Ik.max=20А
Uбэ=1,2...2в
Ток базы транзистора в открытом состоянии не должен превышать максимально допустимый ток на выходе параллельного порта микроконтроллера. Максимальный ток на выходе составляет: не более 10мА.
При Iк=2А получим:
![]() (3.11)
(3.11)
Определим величину ограничительного резистора R:
 (3.12)
(3.12)
откуда:
![]() (3.13)
(3.13)
Из ряда Е12 выберем R=820 Ом
3.3 Расчёт элементов блока питания
Блок питания включает в себя трансформатор, двухполупериодные выпрямители, сглаживающие конденсаторы и стабилизатор напряжения.(рисунок 3.8) Основным элементом блока питания является трансформатор. Ниже приведен расчёт питающего трансформатора для
Таблица 3.3 - Исходные данные для расчёта трансфрматора
| Величина | Значение |
| Напряжение питающей сети, U1 | 220В |
| Напряжение вторичной обмотки, U2 | 5В |
| Напряжение вторичной обмотки, U3 | 12В |
| Напряжение вторичной обмотки, U4 | 36В |
| Ток вторичной обмотки I2 | 150мА+3мА+6мА |
| Ток вторичной обмотки I3 | 2А |
| Ток вторичной обмотки I4 | 10мА |
Номинальной мощностью трансформатора питания называют сумму номинальных мощностей вторичных обмоток. Номинальная мощность вторичной обмотки определяется как произведение тока при номинальной нагрузке на номинальное напряжение.
Номинальная мощносьт трансформатора пропорциональна частоте напряжения сети, индукции в магнитопроводе, плотности тока обмоток, площади сечения стали в магнитопроводе и площади сечения меди, заполняющей окно магнитопровода.
КПД трансформатора:
 (3.14)
(3.14)
где Pном-номинальная мощность трансформатора, Pмп-мощность потерь в магнитопроводе, Pоб-мощность потерь в обмотках
Определим номинальную мощность трансформатора:
 (3.15)
(3.15)
Подставляя данные из таблицы 3.3 получим:
![]()
Определяем произведение:
 (3.16)
(3.16)
где Sм-площадь сечения магнитопровода, см2; Sок-площадь окна магнитопровода, см2; Pном-мощность, Вт; f- частота питающей сети, Гц; Bm- амплитуда магнитной индукции в магнитопроводе, Т; j- плотность тока, А/мм2; kок- коэффициент заполнения окна магнитопровода; kм- коэффициент заполнения сечения стержня магнитопровода. Значение Bm- можно выбирать по графику (рисунок 3.9) в зависимости от габаритной мощности трансформатора Pг»(1,05..1,3)Pном и марки стали. Наибольшее значение коэффициента при Pном соответствует трансформаторам с Pном<10 В*А, наименьшее – трансформаторам с Pном>100 В*А. Плотность тока в обмотках выбирают от 2 (при Pном>200 В*А) до 6 А/мм2 (при Pном=10 А*В и менее) Коэффициент kок, тем меньше, чем тоньше провода обмоток (чем меньше номинальная мощность трансформатора). Для броневых трансформаторов с Pном=15..50 В*А можно принимать kок=0,22..0,28, с Pном=50..150 В*А – kок=0,28..0,34 и для трансформаторов большей мощности kок=0,35..0,38
Коэффициент kм – зависит от толщины листов, их вида и изоляции. Для магнитопроводов из Ш-образных пластин толщиной 0,1 мм, изолированных лаком, можно принять kм=0,7; при толщине пластин 0,2мм - kм=0,85; при толщине пластин 0,35 мм kм=0,91. Если пластины изолированны фосфатной плёнкой, то можно принимать kм=0,75; 0,89 ;0,94 соответственно.
Выбранные значения коэффициентов приведены в таблице 3.4
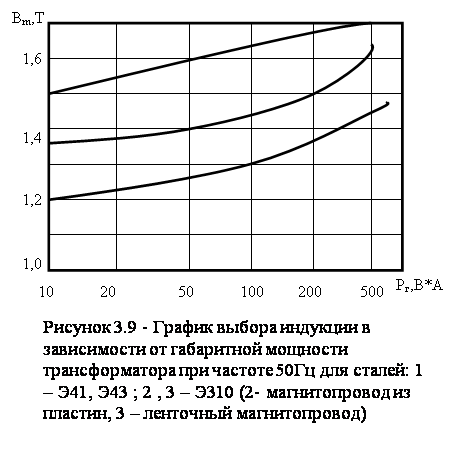
Таблица 3.4 - Выбранные из условий значения
| Коэффициент | Значение |
|
Pг |
1,2*Pном=1,2*25,16=30,192Вт |
|
Bm |
1,28Т (марка стали Э41) |
| j |
4 А/мм2 |
|
kок |
0.24 |
|
kм |
0.7 |
Определяем произведение Sм*Sок из формулы (3.16):

Определяем размеры магнитопровода (см. таблицы 3.5, 3.6).
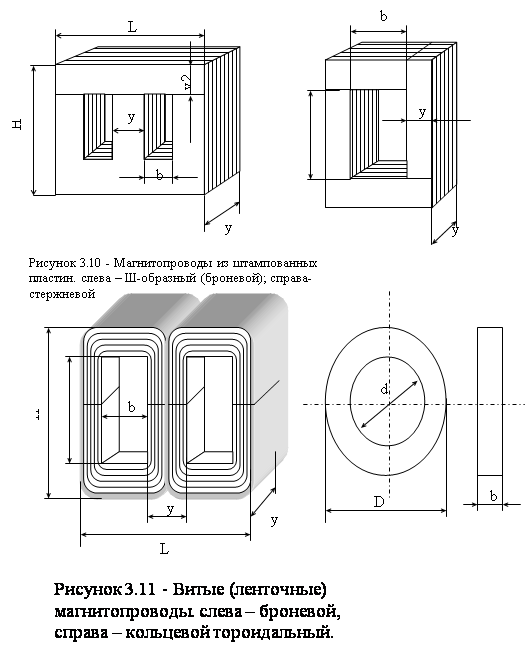
Таблица 3.5 - Размеры нормализованных броневых магнитопроводов из штампованных пластин. (см. рисунок 3.10)
|
Тип |
y,мм |
y1,мм |
b,мм |
h,мм |
L,мм |
H,мм |
Средняя длина пути магн. линии |
|
Ш |
9 |
9; 12 |
9 |
22,5 |
36 |
31,5 |
7,72 |
|
|
12 |
10; 12; 16; 20; 25; 32 |
12 |
30 |
48 |
42 |
10 |
|
16 |
10; 12; 16; 20; 25; 32; 40 |
16 |
40 |
64 |
56 |
13,7 |
|
|
20 |
12; 16; 20; 25; 32; 40; 50 |
20 |
50 |
80 |
70 |
17,4 |
|
|
25 |
16; 20; 25; 32; 40; 50; 64 |
25 |
62,5 |
100 |
87,5 |
21,4 |
|
|
32 |
20; 25; 32; 40; 50; 64;80 |
32 |
80 |
128 |
112 |
27,4 |
|
|
40 |
25; 32;40; 50; 64; 80; 100 |
40 |
100 |
160 |
140 |
34,3 |
|
|
ША |
5 |
6,3; 10 |
5 |
12,5 |
20 |
17,5 |
4,3 |
|
6 |
8; 12,5 |
6 |
15 |
24 |
21 |
5,2 |
|
|
8 |
10; 16 |
8 |
20 |
32 |
28 |
6,3 |
|
|
10 |
16; 20 |
10 |
25 |
40 |
35 |
8,6 |
|
|
12 |
25 |
12 |
30 |
48 |
42 |
10,3 |
|
|
ШВ |
3 |
4; 6,3 |
3,5 |
8 |
14 |
12 |
2,8 |
|
4 |
4; 8 |
5 |
10 |
20 |
15 |
3,4 |
Таблица 3.6 - Размеры нормализованных ленточных броневых магнитопроводов (см. рисунок 3.11)
|
Тип |
y,мм |
y1,мм |
b,мм |
h,мм |
L,мм |
H, мм |
Средняя длина пути магн. линии, см |
|
ШЛ |
4 |
4; 5; 6,5; 8 |
4 |
10 |
16 |
14 |
3,4 |
|
|
5 |
5; 6,5; 8; 10 |
5 |
12 |
20 |
17 |
4,2 |
|
|
6 |
6,5; 8; 10; 12,5 |
6 |
15 |
24 |
21 |
5,1 |
|
|
8 |
8; 10; 12,5; 16 |
8 |
20 |
32 |
28 |
6,8 |
|
|
10 |
10; 12,5; 16; 20 |
10 |
25 |
40 |
35 |
8,5 |
|
|
12 |
12,5; 16; 20; 25 |
12 |
30 |
48 |
42 |
10,2 |
|
|
16 |
16; 20; 25; 32 |
16 |
40 |
64 |
56 |
13,6 |
|
|
20 |
20; 25; 32; 40 |
20 |
50 |
80 |
70 |
17,1 |
|
|
25 |
25; 32; 40; 50 |
25 |
62,5 |
100 |
87,5 |
21,3 |
|
|
32 |
32; 40; 50; 64 |
32 |
80 |
128 |
112 |
27,3 |
|
|
40 |
40; 50; 64; 80 |
40 |
100 |
160 |
140 |
34,2 |
|
ШЛМ |
8 |
8; 10; 12,5; 16 |
5 |
14 |
26 |
22 |
5 |
|
|
10 |
10; 12,5; 16; 20 |
6 |
18 |
32 |
28 |
6,4 |
|
|
12 |
12,5; 16; 20; 25 |
8 |
23 |
40 |
35 |
8,1 |
|
|
16 |
16; 20; 25; 32 |
10 |
26 |
52 |
42 |
9,7 |
|
|
20 |
20; 25; 32; 40 |
12 |
36 |
64 |
56 |
12,7 |
|
|
25 |
25; 32; 40; 50 |
15 |
45 |
80 |
70 |
16 |
|
ШЛО |
4 |
5; 6,5; 8; 10 |
5 |
13 |
18 |
17 |
4,4 |
|
|
5 |
5; 6,5; 8; 10 |
6,2 |
16 |
22,4 |
21 |
5,6 |
|
|
6 |
6; 8,5; 10; 12,5 |
7,5 |
23 |
27 |
29 |
7,3 |
|
|
8 |
8; 10; 12,5; 16 |
10 |
27 |
36 |
35 |
9,6 |
|
|
10 |
10; 12,5; 16; 20 |
12,5 |
32 |
45 |
42 |
11 |
|
|
12 |
12,5; 16; 20; 25 |
20 |
44 |
65 |
57 |
14,7 |
|
|
16 |
16; 20; 25; 32 |
24 |
64 |
81 |
71 |
18,1 |
Для маломощных трансформаторов рекомендуются броневые магнитопроводы, позволяющие изготовить трансформаторы меньших размеров и меньшей стоимости. Для выбранного магнитопровода должно выполняться условие:
![]() (3.17)
(3.17)
Отношение y1/y не должно превышать 2..2,5. В противном случае необходимо выбрать пластины большего размера. Для кольцевых магнитопроводов должно выполняться условие:
![]() (3.18)
(3.18)
Где D,d,b – размеры магнитопровода. (см. таблицу. 3.7)
Таблица 3.7 - Размеры нормализованных ленточных кольцевых магнитопроводов.
| d,мм | D,мм | b,мм | Средняя длина пути магнитной линии, см | d,мм | D,мм | b,мм | Средняя длина пути магнитной линии, см |
| 10 | 16 | 4; 5; 6,5; 8 | 4 | 32 | 50 | 16; 20; 25; 32 | 12,8 |
| 12 | 20 | 5; 6,5; 8; 10 | 5 | 40 | 64 | 20; 25; 32; 40 | 16,3 |
| 16 | 26 | 6,5; 8; 10; 12,5 | 6,5 | 50 | 80 | 25; 32; 40; 50 | 20,4 |
| 20 | 32 | 8; 10; 12,5; 16 | 8,1 | 64 | 100 | 32; 40; 50; 64 | 25,8 |
| 25 | 40 | 10; 12,5; 16; 20; 25 | 10,2 | 80 | 128 | 40; 50; 64; 80 | 32,6 |
Выбранные параметры магнитопровода приведены в таблице 3.8
Таблица 3.8 - Выбранные параметры магнитопровода
Ш-образный броневой магнитопровод. Типоразмер: Ш12х10 |
|
Параметр |
Значение |
H |
42 мм |
| h | 30 мм |
| L | 48 мм |
| b | 12 мм |
| y | 12 мм |
| y1 | 10 мм |
Определяем количество витков провода для каждой из обмоток:
 (3.19)
(3.19)
где Ui – напряжение на i-ой обмотке, В; f - частота, Гц; Bm – амплитуда магнитной индукции, Т; Sм-площадь, см2; Число витков вторичных обмоток следует увеличить на 2..5%, чтобы учесть внутреннее падение напряжения. Наибольшее значение относится к трансформаторам с мощностью до 10 В*А, наименьшее – к трансформаторам с номинальной мощностью не менее 200 В*А.
Рассчитаем площадь сечения магнитопровода Ш-образной конструкции:
![]()
Расчитываем количество витков каждой обмотки по формуле (3.19)
Определяем диаметры проводов обмоток по формуле:
 (3.20)
(3.20)
где Ii – ток i-ой обмотки, А; j – плотность тока, А/мм2; Ток в первичной обмотке примерно равен 1,1 Pном/U1
Из (3.19) находим:
Проверка правильности компоновки трансформатора производится путём определения числа витков в слое цилиндрической обмотки:
 (3.21)
(3.21)
где h – высота окна, мм; dк – толщина материала каркаса, мм; dиз – диаметр провода, мм, с изоляцией;
Число слоёв обмотки Nсл = w/wсл, где w – число витков обмотки. Толщина обмотки dоб = Nсл *(dиз+dиз), где dиз – толщина изоляции между слоями. Должно выполняться условие:
![]() (3.22)
(3.22)
где ådоб – суммарная толщина всех обмоток; dпр – суммарная толщина всех прокладок между обмотками.; b – ширина окна. Если это условие не выполняется следует увеличить размер магнитопровода.
Определим значения резисторов на делителе R1-R2, задающем выходное напряжение на микросхеме DD1. Номиналы резисторов R1, R2 выбираются из выражения:
![]() (3.23)
(3.23)
При этом ток делителя должен быть более чем 1,5 мА.
Требуемое выходное напряжение 2.5В, следовательно:
![]() (3.24)
(3.24)
причём:
![]() (3.25)
(3.25)
откуда:
![]()
Зададимся R1=100 Ом, тогда из (3.24, 3.25) найдём R2:
![]()
4 РАЗРАБОТКА ТОПОЛОГИИ ПЕЧАТНЫХ ПЛАТ
4.1 Конструкторско-технологический расчёт печатных плат
Конструктивно-технологический расчет печатных плат проводится с учетом производственных погрешностей рисунка проводящих элементов, фотошаблона, базирования, сверления и т.п. За основу принимаем параметры плат третьего класса точности, как наиболее оптимальный вариант по технологичности и простоте изготовления. Платы данного класса точности так же являются наиболее распространенными в области микроэлектроники.
Граничные значения основных параметров печатного монтажа, которые могут быть обеспечены при конструировании и производстве для третьего класса точности приведены в таблице 4.1.
Таблица 4.1 - Номинальные значения размеров основных параметров элементов конструкции печатных плат для узкого места
| Наименование элемента | Условное обозначение | Размеры, мм |
| Ширина проводника |
|
0.25 |
| Расстояние между проводниками |
|
0.25 |
| Гарантированный поясок наружного слоя |
|
0.1 |
| Гарантированный поясок внутреннего слоя |
|
0.05 |
|
Отношение диаметра отверстия к толщине Платы |
|
0.33 |
Элементы, которые содержит разрабатываемый печатный узел, приведены в таблице 4.2.
Таблица 4.2 - Габаритные размеры элементов
| Наименование элемента | Тип корпуса | Количество, шт. |
Габаритные размеры, мм |
|
| К1816ВЕ55 | 2123.40-6 | 1 | 49,7х14,7 | |
| КР572ПВ4 | 2121.28-6 | 1 | 36,0х14,7 | |
| КР1008ВИ1 | 2101.8-1 | 2 | 10,5х6,5 | |
| Кварц | 1 | 10х7,5 | ||
| Резисторы С2-23-0.125 | С2-23-0.125 | 5 | 10х4 | |
| Конденсатор К22У-2 | К22У-2 | 1 | 10х4 | |
| КонденсаторыК22У-2 | К22У-2 | 3 | 6х4 | |
| КонденсаторК21-9 | К21-9 | 2 | 10х4 | |
| Конденсатор КМ | КМ | 1 | 10х4 | |
| Вилка XР1 | 1 | 40х18 | ||
| Вилка XР2 | 1 | 40х18 | ||
| Вилка ХР3 | 1 | 40х18 | ||
| Вилка ХР4 | 1 | 75х18 | ||
| Вилка ХР5 | 1 | 40х18 | ||
| Суммарная площадь: |
5752,95 мм2 |
|||
Общая площадь, занимаемая компонентами с учетом припусков вокруг каждого элемента, обусловленных шириной контактных площадок, равна 5752,95мм2. Коэффициент заполнения платы не имеет существенного значения, т.к. разрабатываемое устройство является стационарным. Ориентировочный коэффициент заполнения 0.6. При этом площадь платы будет составлять 9588,25. При проектировании печатного узла одним из наиболее важных критериев оптимизации является правильная компоновка, т.е. максимальное использование площади печатной платы при минимально возможных ее размерах. В соответствии со стандартом МЭК 297-3 выбираем из предложенных типоразмеров размер печатной платы: 100 x 160 мм.
Таблица 4.3 Основные размеры печатных плат по стандарту МЭК 297-3
| Высота Н, мм | Ширина | |
| Ряд 1 | Ряд 2 | В, мм |
| 55,55 | 67,31 | 100; 160; 220; 280 |
| 100,00 | 111,76 | 100; 160; 220; 280 |
| 144,45 | 156,20 | 100; 160; 220; 280 |
| 188,90 | 200,70 | 100; 160; 220; 280 |
| 233,35 | 245,10 | 100; 160; 220; 280 |
| 277,80 | 289,55 | 100; 160; 220; 280 |
| 322,25 | 334,00 | 100; 160; 220; 280 |
| 366,70 | 378,45 | 100; 160; 220; 280 |
| 411,15 | 422,90 | 100; 160; 220; 280 |
| 455,60 | 467,35 | 100; 160; 220; 280 |
| 500,05 | 511,80 | 100; 160; 220; 280 |
При выборе типоразмера учитывались прежде всего функциональные требования, выражающие плотность компоновки. Математическое представление оптимизации представляет собой коэффициент заполнения платы, который равен отношению площади, занятой элементами к общей площади печатной платы.
Произведем расчет параметров нашей печатной платы.
Номинальные значения диаметра монтажного отверстия:
![]() (4.1)
(4.1)
где dЭ – максимальное значение диаметра вывода навесного элемента, устанавливаемого на плату;
r – разность между минимальным значением диаметра отверстия и максимальным диаметром вывода элемента;
![]() dН.О. – нижнее предельное
отклонение номинального значения диаметра отверстия.
dН.О. – нижнее предельное
отклонение номинального значения диаметра отверстия.
d=0,6+0,1+0,2=0,9 (мм)
Минимальный диаметр контактной площадки вокруг монтажного отверстия:
![]() (4.2)
(4.2)
где ![]() dВО – верхнее предельное отклонение диаметра отверстия;
dВО – верхнее предельное отклонение диаметра отверстия;
![]() tВО – верхнее предельное отклонение
ширины проводника;
tВО – верхнее предельное отклонение
ширины проводника;
![]() tНО – нижнее предельное отклонение
ширины проводника;
tНО – нижнее предельное отклонение
ширины проводника;
bН – гарантированный поясок контактной площадки;
![]() dТР – допуск на подтравливание
отверстия;
dТР – допуск на подтравливание
отверстия;
![]() d – допуск на расположение отверстия;
d – допуск на расположение отверстия;
![]() p – допуск на расположение контактной
площадки.
p – допуск на расположение контактной
площадки.
D=(0,9+0,05)+2*0,1+0,1+2*0,035+(0,082+0,32+0,082)0,5=0,64 (мм)
Минимальный диаметр переходного отверстия:
![]() (4.3)
(4.3)
где j – коэффициент = 0,33
hПП – толщина печатной платы.
dП![]() 0,33*2
0,33*2![]() 0,66 (мм)
0,66 (мм)
Номинальное значение ширины проводника:
![]() (4.4)
(4.4)
где tТД – минимально допустимое значение ширины проводника.
tП=0,17+0,08=0,25 (мм)
Номинальное значение расстояния между соседними элементами проводящего рисунка:
![]() (4.5)
(4.5)
где SТД – минимально допустимое расстояние между соседними элементами проводящего рисунка.
S=0,15+0,1=0,25 (мм)
Минимальное расстояние для прокладки n-го количества проводников между двумя отверстиями с контактными площадками с диаметрами D:
 (4.6)
(4.6)
где n – количество проводников;
![]() l – допуск.
l – допуск.
l=(1,64+1,64)/2+0,25*1+0,25*(1+1)+0,05=2,44 (мм)
т.е. между двумя контактными площадками можно провести максимум только один проводник.
Сопротивление самого длинного из возможных проводников:
 (4.7)
(4.7)
где hФС – толщина фольгированного слоя.
R=(1,72*10-8*0,34)/(0,25*10-3*35*10-8)=0,55 (Ом)
Допустимый ток в печатном проводнике:
![]() (4.8)
(4.8)
где ![]() - допустимая плотность
тока.
- допустимая плотность
тока.
IMAX=20*0,25*0,035=0,175 (А)
Падение напряжения на самом возможно длинном печатном проводнике:
![]() (4.9)
(4.9)
![]() U=0,0172*20*0,34=0,116 (В)
U=0,0172*20*0,34=0,116 (В)
Требуемое сечение печатного проводника шины питания и ‘земли’:
 (4.10)
(4.10)
где IП – ток, протекающий через проводник и равный сумме токов всех элементов. В таблице 3 приведены токи потребляемые микросхемами. Просуммируем их и умножим на коэффициент запаса, который учитывает токи утечек и токи, потребляемые пассивными элементами и транзисторами. Поэтому примем коэффициент запаса равным 40.
SПЗ![]() 0,0172*0,34*0.17/(0,015*5)*40=0,2
(мм)
0,0172*0,34*0.17/(0,015*5)*40=0,2
(мм)
Принимаем ширину шины питания 1 мм.
Используя полученные данные можно приступать к трассировке платы системы управления.
Таблица 4.4 - Электрические параметры микросхем
Микросхема |
Потребляемый ток, мА |
| КР1816ВЕ51 | 150 |
| КР572ПВ4 | 3 |
| КР1008ВИ1 | 6 |
| ЖК –модуль | 10 |
| Сумма | 170 |
При трассировке печатной платы блока питания устройства, необходимо подсчитать ширину трассы для каждого вида нагрузки. Блок питания, содержит в себе источник опорного напряжения 2,5 В, ток потребления не более 1-3 мА, питание системуы управления +5В на ток не более 170мА, и питание шагового двигателя напряжением +12В с током потребления не более 2А.
Из вышесказанного следует что по формуле (4.10) определяем требуемую ширину трасс питания для каждого из оставшихся двух потребителей:
SПЗ![]() 0,0172*0,34*0.003/(0,015*5)*40=0,001
(мм)
0,0172*0,34*0.003/(0,015*5)*40=0,001
(мм)
SПЗ![]() 0,0172*0,34*2/(0,015*5)*40=1,7(мм)
0,0172*0,34*2/(0,015*5)*40=1,7(мм)
Таблица 4.5 - Площади элементов блока питания
| Элемент | Тип корпуса | Кол-во, шт | Габаритные размеры | ||
| К142ЕН11 | 2121.28-6 | 1 | 36,0х14,7 | ||
| Резисторы | 3 | 10х4 | |||
| Диоды | 8 | D=22 | |||
| Резисторы С2-23-0.125 | С2-23-0.125 | 5 | 10х4 | ||
| Конденсатор К50-6 | К50-6 | 6 | D=30мм | ||
| Вилка XР1 | 1 | 40х18 | |||
| Вилка XР2 | 1 | 40х18 | |||
| Суммарная площадь: |
12960мм2 |
||||
Принимаем толщину проводников для 2.5В и 5 В равную 1мм, а для питания шагового двигателя и других исполнительных устройств – 2мм. Коэффициент заполнения печатной платы блока питания можно довести до значения 0.9, т.к блок питания имеет в своём составе достаточно крупногабаритные элементы. Таким образом площадь трасс незначительна по сравнению с площадью элементов. Для удобства дальнейшей компоновки плат в корпусе выберем габариты печатной платы блока питания 100х160мм.
4.2 Особенности назначения применяемых пакетов САПР
Фирмой ACCEL выпускается два варианта системы PCAD 8.5: Master Design и Associate Design. Большими возможностями обладает вариант Master Design.
Система поддерживает широкий набор графических дисплеев, плоттеров, манипуляторов и цифровых планшетов различных типов.
Система PCAD позволяет выполнять следующие проектные операции: создание символов элементов принципиальной электрической схемы и корпусов; графический ввод принципиальной электрической схемы и конструктивов плат проектируемого устройства; ручную и автоматическую трассировку печатных проводников произвольной ширины; автоматизированный контроль результатов проектирования ПП на соответствие принципиальной электрической схеме.
Программный комплекс PCAD включает в себя взаимосвязанные пакеты программ, образующих систему сквозного проектирования ПП электронной аппаратуры. В ее состав входят следующие программы:
-Schematic Editor – графический ввод и редактирование принципиальной электрической схемы;
-Symbol Editor – графический ввод и редактирование символов радиоэлектронных компонентов на принципиальных схемах;
-PCB Editor – графический ввод и редактирование конструктивов ПП, автоматическое или ручное размещение компонентов на плате;
-Part Editor – графический ввод и редактирование корпусов компонентов РЭА и стеков контактных площадок.
Графический редактор принципиальных схем и символов компонентов имеет два режима: Schematic Editor и Symbol Editor. После загрузки графического редактора экран дисплея форматируется и разбивается на несколько зон. Зона меню подкоманд, предназначенная для команд графического редактора, расположена справа от окна и внизу под ним. Команды выбираются щелчком левой кнопки мыши. Расположенные справа команды имеют подкоманды, список которых выводится на экран после выбора основной команды.
Построение чертежа выполняется с помощью манипулятора мышь, перемещаемого по горизонтальной поверхности рабочего стола, при этом на экране дисплея синхронно перемещается курсор в виде креста. Координатная сетка на экране упрощает процесс построения чертежа и повышает точность позиционирования. Шаг координатной сетки по осям X и Y показан в поле Grd. Текущие координаты указываются в поле XY.
В схемном графическом редакторе полная информация о чертеже заносится в 18 слоев, устанавливаемых по умолчанию. На каждой фазе работы с графическим редактором необходима не вся имеющаяся информация, поэтому часть слоев делают невидимыми. Информация о слоях выводится по команде View Layer. Всего слоев поддерживается до 100. Слои могут быть окрашены в любой из 16 цветов. Каждый слой имеет одно из трех состояний: OFF – слой невидим и недоступен, ON – слой видим но недоступен, ABL – слой видим и может стать активным.
Также отличительной особенностью PCAD является использование атрибутов. Атрибуты состоят из двух частей: ключевого слоя и значения, разделенных знаком равенства “=”. Ключевое слово должно начинаться с буквы и иметь длину до 23 символов. Значение атрибута представляет собой последовательность чисел или текстовых переменных, разделенных запятыми. После вода атрибута ключевое слово и знак равенства становятся невидимыми на экране.
При использовании атрибутов можно значительно облегчить работу со схемой. В частности можно использовать автоматическое создание корпусов компонентов, автоматическое присвоение имени цепи и др.
При создании символов УГО элементов дискретного типа есть своя специфика, которую следует помнить.
Для дискретных компонентов не должны присутствовать имена и номера выводов на схеме. Имя дискретного компонента не слое DEVICE не наносится. Номера выводов по команде Enter/Packing Data наносят на слое ATTR2, который в дальнейшей работе выключают.
Для резисторов дополнительно следует указать атрибут RVALUE=<номинал>. Он необходим для диагностики ошибок, связанных с отсутствием резистора в цепях для микросхем с открытым коллектором.
Для дискретных компонентов целесообразно создавать два УГО: для вертикального и горизонтального расположения на схеме.
Замечательной особенностью системы PCAD является возможность определения стратегии трассировки, что позволяет в значительной степени повысить эффективность автоматической трассировки и сделать её индивидуальной для каждого конкретного разрабатываемого устройства.
Для трассировки печатной платы системы управления применены следующие основные параметры с учётом требований к 3-му классу точности:
- ширина основной трассы 0,25мм
- ширина шины питания 1мм
- трассировка производится по сетке 2.5мм
- расстояние между трассами не менее 0.25мм
- расстояние между отверстиями не менее 2,5мм (кроме крепления разъёмов)
- Трассировка в двух слоях в перпендикулярных направлениях
- Разрешено скругление углов и диагональная трассировка.
- Стратегия – Steiner
Для платы блока питания установлены следующие параметры:
- ширина основной трассы 1мм
- ширина шины питания исполнительных устройств2мм
- трассировка производится по сетке 1,25мм
- расстояние между трассами не менее 0.25мм
- расстояние между отверстиями не менее 2,5мм (кроме крепления разъёмов)
- Трассировка в двух слоях; приемущественные направления не определены.
- Разрешено скругление углов и диагональная трассировка.
- Стратегия – Steiner
Для редактирования чертежей будет использован пакет AutoCAD.
Команды AutoCAD могут выбираться из меню с помощью кнопок панелей управления, а так же набираться с клавиатуры в текстовом окне. Независимо от способа набора команды для ее повторения необходимо нажать клавишу Enter. AutoCAD хранит чертежи в файлах с расширением “.dwg”. Кроме чертежа этот файл содержит ряд параметров. При создании нового чертежа эти параметры устанавливаются по умолчанию, либо берутся из чертежа прототипа.
В AutoCAD имеется возможность определения формата и точности представления чисел. Ввод координат с клавиатуры возможен в абсолютных и относительных координатах. Относительные координаты задают смещение относительно последней введенной точки. Для удобства работы можно определить пользовательскую систему координат, которая может быть смещена относительно мировой и повернута под любым углом.
Чертежи в AutoCAD создаются в примитивах, над которыми понимают элементы чертежа, которые обрабатывают как единое целое, а не как совокупность точек и объектов. Система позволяет ставить линейные, угловые, диаметральные, радиальные и координатные размеры. Составные элементы размера: размерная линия, выносная линия и размерный текст. Имеется возможность ввода своего значения. Все линии, стрелки, элементы текста рассматриваются как один примитив.
Как и система PCAD система AutoCAD поддерживает слойность чертежа. Слои обладают свойствами сходными со слоями PCAD, что дает возможность редактировать чертежи созданные PCAD-ом. Слои в AutoCAD могут содержать имя слоя, состоящее из символов и цифр-букв, они могут переходить из включенного состояния в выключенное и наоборот. На каждом слое можно задавать свой цвет и тип линии, что помогает при создании и редактировании чертежей.
Одной из особенностей AutoCAD, является то, что он поддерживает специфический язык программирования Lisp. Этот язык ориентирован на обработку списков. Применение этого языка в AutoCAD дает ему широкие возможности.
5 Разработка алгоритма программы
В данной системе на программную часть, которая является важнейшей, и которая во многом определяет эффективность работы устройства, возложено множество функций, которые порой можно реализовать при помощи дополнительных электронных блоков. Например для генерации управляющих последовательностей сигналов на шаговый двигатель можно применять специализированные микросхемы. Однако, как мне кажется, в случае если в систему включён двигатель небольшой мощности, и не требующий большого количества управляющих входов, функцию генерации последовательностей управления можно возложить на микроконтроллер. Таким образом на программу возложены функции управления исполнительными устройствами, включая генерацию последовательностей управляющих сигналов; вывода на ЖК-модуль информации, опрос клавиатуры, опрос АЦП и получения данных с датчиков.
Программа должна состоять из следующих шагов:
1. Начальные установки после включения питания.
2. Опрос датчиков с целью получения информации о состоянии системы (уровень воды в бассейне, температура)
3. Запрос на установку исходных параметров комплекса. (Установка параметров производится при помощи меню с изменением опций)
4. После окончания установки исходных данных, и выбора в меню пункта запуска системы, приступить к установке комплекса в начальные условия (наполнение бассейна водой, контроль температуры)
5. Запуск системы на выполнение процедуры. (установка нагрузки; изменение нагрузки, постоянная нагрузка и другие режимы; возможен параллельно режим поддержания постоянной температуры в бассейне)
6. Снятие нагрузки, возврат к пункту 1.
Каждый пункт необходимо сопровождать выводом данных о текущем состоянии системы. В таблице 5.1 приведен список портов и назначение каждого разряда по схеме.
Таблица 5.1 - Назначение разрядов портов по схеме.
| Номер разряда порта | Назначение по схеме | Номер разряда порта | Назначение по схеме | Номер разряда порта | Назначение по схеме |
| P1.0 | Шина данных (АЦП, ЖКИ) | P3.1 | Клапан подачи холодной воды | Р2.3 | Тоже |
| Р1.1 | Тоже | Р3.2 | Клапан слива воды | Р2.4 | Выбор микросхемы АЦП (CS инверсный) |
| P1.2 | Тоже | Р3.3 | Вход прерывания от таймера.(1 сек) | Р2.5 |
Защёлка адреса памяти АЦП (ALE) |
| P1.3 | Тоже | Р3.4 | Шаговый двигатель | Р0.0, Р0.1 |
Клавиатура (чтение) |
| P1.4 | Тоже | Р3.5 | Шаговый двигатель | Р0.2, Р0.3 |
Клавиатура (сканир.) |
| P1.5 | Тоже | Р3.6 | Шаговый двигатель | Р0.4 | Сигнал выбора регистра данных/команд (A0) |
| P1.6 | Тоже | Р3.7 | Шаговый двигатель | Р0.5 | Запись/чтение (WR/RD) |
| P1.7 | Тоже | Р2.1 | Адрес слова для чтения данных из АЦП | Р0.6 | Строб разрешения чтения/записи (Е) |
| P3.0 | Клапан подачи горячей воды | Р2.2 | Тоже |
Данная система управления отличается тем, что её функционирование во многом зависит от программы, что даёт возможность быстрого расширения и усовершенствования выполняемых на базе этого устройства функций.
6 Охрана труда и экологическая безопасность
Обеспечение эргономичности программируемого таймера для установки подводного вытяжения позвоночника.
Эффективность системы «человек-машина» (СЧМ) определяется тем, насколько такая система соответствует эргономическим требованиям.
Эргономические требования к СЧМ отражают весь комплекс взаимосвязей и взаимозависимостей компонентов системы и имеют достаточно сложную структуру. Эргономические показатели программируемого таймера включают в себя следующие требования:к алгоритму деятельности человека-оператора; к средствам отображения информации; к органам управления; к средствам обеспечения безопасности и другому оборудованию на рабочем месте; к габаритным размерам рабочего места; к размещению средств отображения информации и органов управления; к физическим факторам; к биологическим факторам [6].
Рабочим местом оператора СЧМ называется некоторое пространство, с расположенными в нем средствами отображения информации, органами управления и вспомогательным оборудованием, где осуществляется трудовая деятельность человека-оператора.
Рабочая среда данного пространства представляет собой совокупность физических, химических, биологических, информационных, социально-психологических и эстетических факторов внешней среды, воздействующей на оператора. Для оценки качества рабочей среды существует система показателей, характеризующих состояние каждого фактора. Эта система включает оптимальный (допустимый) уровень того или иного фактора, фактическую его величину, определяемую с помощью инструментальных методов исследования или экспертным путем, а также степень отклонения фактической величины от оптимального уровня, которая выражается в баллах.
Предложена четырех бальная система оценок факторов рабочей среды: 0, 1, 2, 3.
Баллом «0» оцениваются факторы, которые не превышают нормативных или предельно допустимых значений. Если на рабочем месте все факторы оценены баллом «0», то на нем сформирована комфортная рабочая среда.
Баллом «1» оцениваются факторы рабочей среды, величина которых несколько превышает допустимые (оптимальные) уровни. Наличие факторов в рабочей зоне, оцененных баллом «1», характеризует рабочую среду как относительно дискомфортную.
Баллом «2» оцениваются факторы, формирующие тяжелые, вредные или напряженные условия труда, т.е. экстремальную рабочую среду.
Баллом «3» оцениваются факторы, формирующие очень тяжелые, очень вредные или очень напряженные условия труда, т.е. сверхэкстремальную рабочую среду [8].
Задачей в инженерной психологии и технической эстетики в приборостроении является изучение особенностей работы человека-оператора при обслуживании РЭС, раскрытие средних способностей нормальной деятельности оператора при управлении, установление разумных пределов быстроты реакции оператора, выработка требований, способствующих созданию рационального конструкторского решения и оптимальных условий окружающей среды, а также качественное оформление приборов.
Качество внешнего оформления прибора зависит от того, насколько удачно средства обеспечения технических требований сочетаются со средствами обеспечения требований эстетики.
Реализация законченного внешнего вида прибора осуществляется конструктором и дизайнером.
Приборы будут отвечать своему назначению тогда, когда их форма будет проста и выразительна, а отдельные части – подчеркивать основное назначение прибора.
Каждый цветовой фон по-разному оказывает влияние на степень утомляемости зрения. Наиболее утомляет глаз красный и сине-фиолетовый цвета. Наиболее приемлемы желтый, желто-зеленый и голубовато-зеленый цвета и цвета слабой насыщенности.
Конструирование лицевой панели устройства включает выполнение следующих этапов: определение размеров лицевой панели и индикаторов; выбор органов управления; эргономический анализ спроектированной лицевой панели [7].
Размещаемые на панели элементы коммутации, органы управления на ее поверхности компонуются в соответствии с требованиями эргономики и технической эстетики.
Габариты панели выбираются на основе комплексного решения соблюдения эргономических требований по размещению элементов панели и компоновки остальной части устройства РЭС.
В разрабатываемом устройстве имеются следующие органы управления:
1) выключатель двухпозиционный для включения и выключения прибора. На панели в верхнем положении тумблера должно быть написано «ВКЛ.», а в нижнем положении– «ВЫКЛ.». Размер букв и расстояние между ними будет рассчитан ниже.
2) клавиатура, включающая четыре клавиши размером 10х10 мм , первая из которых предназначена для выхода в меню функций, и имеет на поверхности надпись «меню», вторая и третья – клавиши изменения вводимых величин, обозначенные стрелками, и четвёртая – клавиша ввода величины/выбора элементов меню, обозначенная как «ввод»
В разрабатываемом устройстве применен микропроцессорный жидкокристаллический модуль для отображения информации (рисунок 6.1) .

Цифровой индикатор располагается по центру панели, а под ним должны быть расположены органы управления датчиками. Угловые размеры знаков находятся в пределах 20 угловых минут. Контраст знаков и фона не менее 3 к 1 [7]. В системе индикации обеспечена возможность регулировки контрастности переменным резистором. Ручка для поворотной регулировки r=3мм.
Максимальная длина лицевой панели определяется исходя из горизонтального и вертикального угловых размеров зоны периферического зрения оператора и требуемого расстояния до панели. Она вычисляется по формуле:
 (6.1)
(6.1)
где ![]() - требуемое расстояние до
лицевой панели (для пульта l=0,5
м);
- требуемое расстояние до
лицевой панели (для пульта l=0,5
м);
![]() – горизонтальный угол обзора панели
(для зоны периферического зрения
– горизонтальный угол обзора панели
(для зоны периферического зрения ![]()
![]()
Максимальная высота панели определяется по формуле:
 , (6.2)
, (6.2)
где ![]() – вертикальный угол обзора
панели (
– вертикальный угол обзора
панели (![]() )
)
![]() .
.
Площадь поля зрения на лицевой панели вычисляется по формуле:
![]() (6.3)
(6.3)
 .
.
Отсюда, при числе элементов, размещаемых на панели минимальная площадь панели вычисляется по формуле:
![]() (6.4)
(6.4)
где ![]() – число элементов на
панели;
– число элементов на
панели;
![]() м2.
м2.
Однако, эта площадь не учитывает установочной площади отдельных элементов, размещаемых на панели. Для определения минимально допустимых размеров панели необходимо найти суммарную установочную площадь элементов по формуле:
 (6.5)
(6.5)
где ![]() – установочная площадь i-го элемента;
– установочная площадь i-го элемента;
![]()
Для дальнейших расчетов
примем площадь панели равную ![]() , так как
она больше чем
, так как
она больше чем ![]() .
.
С целью уменьшения габаритов и веса, фактическую площадь лицевой панели выбирают из соотношения:
 (6.6)
(6.6)
где ![]() – коэффициент использования
площади (
– коэффициент использования
площади (![]() );
);
![]()
Минимально допустимые размеры знаков и символов на лицевой панели определяются по формуле:
![]() (6.7)
(6.7)
где ![]() – допустимый угловой поворот
символа (для простых символов
– допустимый угловой поворот
символа (для простых символов ![]() ).
).
![]() .
.
Допустимая минимальная ширина символа определяется по формуле:
![]() (6.8)
(6.8)
где F – формат символа (F=2/3).
Тогда:
![]() .
.
Расстояние между символами принимается равным половине ширины символа. Минимальное расстояние от краев одного знака до другого равно ширине (или высоте) знака [7]. Так как сам прибор имеет покрытие под названием «белая ночь», то все надписи и знаки должны быть выполнены черной краской не имеющей бликов. Краска должна быть нестираемой и при нанесении знаков должна обеспечивать требуемый контраст и четкость.
Минимальное расстояние от края индикатора до ближайшего знака, отображаемого на нем равно ширине (или высоте) знака. В этом случае размеры индикатора вычисляют по формулам:
![]() , (6.9)
, (6.9)
![]() , (6.10)
, (6.10)
где ![]() и
и ![]() – высота и ширина
индикатора;
– высота и ширина
индикатора;
![]() и
и ![]() –
число знаков индикатора, располагаемых по вертикали и горизонтали;
–
число знаков индикатора, располагаемых по вертикали и горизонтали;
![]() и
и ![]() –
высота и ширина символов.
–
высота и ширина символов.
Для табло получим:
![]() мм.
мм.
![]() мм.
мм.
В качестве индикатора используется жидкокристаллический модуль МТ-12S2-1 со встроенной подсветкой.
Для обеспечения оптимального считывания показаний индикатора оператором, необходимо обеспечить контрастность изображения в пределах:
![]() , (6.11)
, (6.11)
где ![]() – коэффициент контраста.
– коэффициент контраста.
Проведем расчет данных для обеспечения нормального считывания показаний индикатора при следующих данных:
внешняя освещенность среды от 10 до 500 лк;
коэффициент отражения
поверхности ![]() =0,75;
=0,75;
высота знака ![]() =9 мм;
=9 мм;
расстояние от глаз оператора до знака примем l=0,5 м.
Определим коэффициент отражения знака по формуле:
![]() , (6.12)
, (6.12)
![]() .
.
Подбираем цвет индикатора
зеленый с ![]() =0,15.
=0,15.
Определим отраженную яркость по формуле:
 , (6.13)
, (6.13)
где Е – освещенность поверхности.
![]() .
.
Определим угловой размер знака индикатора по формуле:
![]() , (6.14)
, (6.14)
![]()
По графику приведенному в
[7] определим для ![]() и
и ![]() значение порогового контраста
значение порогового контраста ![]() . Оно удовлетворяет
значению условия:
. Оно удовлетворяет
значению условия:
 , (6.15)
, (6.15)
Следовательно, дополнительной подсветки не требуется.
Определим яркость знака для максимальной освещенности по формуле :
![]() .
.
Определим яркость фона по формуле (6.13):
![]() .
.
Определим контраст (коэффициент контраста) по формуле:
 , (6.16)
, (6.16)
![]() .
.
Требуемый контраст обеспечен, так как он удовлетворяет условию (6.11).
При размещении средств отображения информации учитывались следующие требования:
а)функционально связанные органы управления и индикатор располагаются в непосредственной близости друг от друга;б)органы управления датчиками и
связанный с ними индикатор расположены так, что сами органы управления и рука при работе с прибором не закрывает показания индикатора;
в)органы управления датчиками сгруппированы соответствующим образом: последовательные действия производятся слева направо [7].
Приблизительная компоновка органов управления на передней панели приведена на рисунке 6.2. Представленная на рисунке 6.2 компоновка панели управления удовлетворяет всем эргономическим требованиям к расположению элементов управления. Действия оператором совершаются слева направо, в процессе работы индикатор всегда находится в поле зрения.
7 Технико-экономическое обоснование
7.1 Характеристика системы управления установкой подводного вытяжения позвоночника
Система управления установкой подводного вытяжения позвоночника – современное электронное устройство, которое служит для осуществления автоматического контроля режимов работы и управления установкой подводного вытяжения позвоночника.
Представленная система является усовершенствованным дополнением выпускаемых в настоящее время тракционных установок. Применение данной системы в комплексе с установками вытяжения позвоночника увеличивает целом стоимость всего комплекса, в связи с чем расчёт сравнительного экономического эффекта и экономического эффекта от внедрения не имеет смысла. Смысл внедрения в производство и использования данной системы заключается в повышении качества контроля параметров проведения процедуры, что в свою очередь положительно скажется на здоровье пациентов.
Практически полная автоматизация процесса позволит сэкономить время на подготовку проведения процедуры. Таким образом, внедрение системы приводит к улучшению показателей комплекса целом, т.е является усовершенствованием, которое можно сказать не обеспечивает прямого экономического эффекта, однако несомненно имеет огромное значение.
Комплекс целом, как обладающий улучшенными характеристиками, будет пользоваться большим спросом, за счёт чего вероятно появится возможность увеличить объём выпуска
7.2 Расчет стоимостной оценки результата производства
7.2.1 Прогноз объема продаж и расчетного периода
Возможный объем продаж прогнозируется исходя из числа потенциальных заказчиков, возможностей развертывания производства, наличия производственной базы и т.д. [24].
Вероятно, наиболее оптимальный взгляд на эту проблему даст объем продаж в районе 160 систем/год. Этой цифры будем придерживаться в дальнейших расчетах. Однако в первый год объем продаж составит вероятно около 80 шт/год, так как первые полгода будут потрачены на научно-конструкторские разработки и выпуск опытно-конструкторских образцов. В случае, если прибыль от производства системы не будет положительной, рассчитаем необходимый объём продаж, при котором экономически целесообразно налаживать выпуск системы.
Расчетный период подразумевает время, в течение которого капиталовложения оказывают воздействие на производственный процесс. Для предприятия производителя расчетный период-срок производства новой техники. Очевидно, что увеличение сроков производства влечет за собой увеличение прибыли, поскольку затраты на освоение новой продукции многократно себя окупают. Этот факт, вроде бы верный, может таить в себе заблуждение. На самом деле, если товар выпускается в течение длительного времени, он теряет свою новизну и перестает привлекать покупателей. Это в большей степени относится к изделиям электронной техники, чем к каким либо другим. Поэтому, реальный срок производства не может быть более 2-4 лет. В качестве расчетного периода возьмем 4 года.
7.2.2 Общая методика расчета экономического эффекта
Большое значение для начала производства проектируемого изделия имеет ожидаемая прибыль или экономический эффект, на этапе завершения проектных работ, как обоснование ожидаемой экономической эффективности. Экономический эффект за расчетный период при сравнительной эффективности рассчитывается по формуле:
![]() ,(7.1)
,(7.1)
гдеDРт – прирост (экономия) стоимостной оценки результата от мероприятия;
DЗт - прирост (экономия) дополнительных затрат на реализацию мероприятия;
т - расчетный период времени.
Расчет экономического эффекта производится с обязательным использованием приведения разновременных затрат и результатов к единому для всех вариантов моменту времени — расчетному году (tp).
Учет фактора времени один из основных вопросов, возникающих при анализе вариантов капиталовложений. Приведение к расчетному году осуществляется путем умножения разновременных затрат и результатов по каждому году на коэффициенты приведения. Коэффициент определяется по формуле:
![]() (7.2)
(7.2)
гдеЕн - норматив приведенных разновременных затрат и результатов;
tр - расчетный год, tр=1.
В качестве расчетного года берем год начала финансирования работ по осуществлению мероприятия, включая проведение научных исследований. Рассчитываем коэффициент приведения на четыре года. Примем Ен=0,4. Результат расчета приводится в таблице 7.1.
Таблица 7.1 - Числовые значения коэффициента приведения
| Расчетный период | 2001 | 2002 | 2003 | 2004 |
| Значение коэффициента | 1 | 0,7 | 0,51 | 0,36 |
7.2.3 Методика и расчет себестоимости и отпускной цены
Расчет экономической эффективности начинаем с расчета себестоимости и отпускной цены единицы продукции.
Себестоимость продукции – это выраженная в денежной форме сумма затрат на производство и реализацию продукции.
В эту статью включается стоимость основных и вспомогательных материалов, необходимых для изготовления единицы продукции по установленным нормам, рассчитываемая по формуле:
 ,(7.3)
,(7.3)
гдеКТР – коэффициент, учитывающий транспортно заготовительные расходы при приобретении материалов;
Нрi – норма расхода i – го вида материала на единицу продукции;
Цi – отпускная цена за единицу i – го вида материала, руб.;
Овi – возвратные отходы i – го вида материала, руб.;
n – номенклатура применяемых материалов.
Коэффициент Нрi и Цi приведены в таблице 7.2. Коэффициент Овi для всех видов материалов равен нулю.
Результаты расчета затрат на сырье и материалы для производства установки приведены в таблице 7.2.
Таблица 7.2 - Расчет затрат на сырье и материалы
| Наименование материала | Марка | Единица измерения | Норморасход | Оптовая цена, руб. |
Сумма, руб. |
| Припой | ПОС-61 | кг | 0,02 | 18 | 0.36 |
| Эмаль | ЭП-525 | л | 0,012 | 14 | 0.17 |
| Флюс | ФСК | кг | 0,05 | 8 | 0.4 |
| Спирт этиловый | л | 0,2 | 7 | 1.4 | |
| Итого: | 2.33 | ||||
| С учетом транспортно-заготовительных работ (5%): | 2.4 | ||||
Расчет затрат на покупные изделия и полуфабрикаты производится по формуле:
 ,(7.4)
,(7.4)
гдеКТР – коэффициент, учитывающий транспортно заготовительные расходы при приобретении материалов;
Цi – отпускная цена за единицу j – го вида материала, руб.;
m – номенклатура применяемых материалов.
Результаты расчета затрат на покупные изделия и полуфабрикаты приведены в таблице 7.3
Таблица 7.3 - Затраты на покупные комплектующие изделия и полуфабрикаты
| Наименование изделия | Единица измерения | Количество | Среднегрупповая оптовая цена, руб. | Сумма, руб. | |
| Микросхема КР1816ВЕ751 | шт. | 1 | 2000 | 2000 | |
| Микросхема КР572ПВ4 | шт. | 1 | 1500 | 1500 | |
| Микросхема КР1008ВИ1 | шт. | 2 | 700 | 1400 | |
| Микросхема КР142ЕН10 | шт. | 1 | 500 | 500 | |
| Микросхема КР142ЕН5А | шт. | 1 | 500 | 500 | |
| 1 | 2 | 3 | 4 | 5 |
| ЖК модуль | шт. | 1 | 10000 | 10000 |
| Транзистор КТ827А | шт. | 7 | 300 | 2100 |
| Диод Д247 | шт. | 7 | 100 | 700 |
| Диод Д206 | шт. | 4 | 100 | 400 |
| Диод Д302 | шт. | 4 | 100 | 400 |
| Диод Д304 | шт. | 4 | 100 | 400 |
| Конденсатор К10-17 | шт. | 7 | 80 | 560 |
| Конденсатор К50-6-4000х50 | шт. | 2 | 200 | 400 |
| Трансформатор сетевой | шт. | 1 | 5000 | 5000 |
| Предохранитель ВП | шт. | 2 | 20 | 40 |
| Резистор МЛТ-0,125 | шт. | 12 | 100 | 1200 |
| Резистор СПО-2 | шт. | 1 | 300 | 300 |
| Кнопка | шт. | 4 | 600 | 2400 |
| Выключатель сетевой | шт. | 1 | 1250 | 1250 |
| Вилка | шт. | 5 | 300 | 1500 |
| Гайка | шт. | 10 | 5 | 50 |
| Винт | шт. | 10 | 10 | 100 |
| Плата 1 | шт. | 1 | 1200 | 1200 |
| Плата 2 | шт. | 1 | 700 | 700 |
| Корпус | шт. | 1 | 6400 | 6400 |
| Итого: | 41000 | |||
| С учетом транспортно-заготовительных работ (5%): | 43050 | |||
Затраты на основную заработную плату производственных рабочих сдельщиков рассчитываются по формуле:
![]() ,(7.5)
,(7.5)
гдеTчсi - часовая тарифная ставка, соответствующая i-му разряду работ;
ti - норма времени по данному i-му виду работ;
Кпр - премиальный коэффициент.
Часовая тарифная ставка рассчитывается по формуле:
 ,(7.6)
,(7.6)
гдеTм1 - месячная тарифная ставка, соответствующая первому разряду;
Ксi – тарифный коэффициент часовой тарифной ставки, соответствующей i – му разряду;
Кпп – коэффициент сложности работы.
Часовая тарифная ставка для рабочих, выполняющих маркировку и упаковку (разряд работы 4, коэффициент сложности равен 1) составит:
 руб/ч
руб/ч
Часовая тарифная ставка для рабочих, выполняющих установку комплектующих на плату (разряд работы 4, коэффициент сложности равен 1,3):составит:
 руб/ч
руб/ч
Часовая тарифная ставка для рабочих, выполняющих работу 5 разряда (коэффициент сложности равен 1,3):составит:
 руб/ч
руб/ч
Расчеты основной заработной платы представлены в таблице 7.4.
Таблица 7.4 - Расчет основной заработной платы
| Наименование операции | Разряд работ |
Норматив времени tштч/оп, ч. |
Часовая ставка тарифа, руб/ч. |
Сумма, руб. |
| Установка комплектующих на плату | 4 | 0,2 | 139,46 | 27,9 |
| Пайка волной припоя | 5 | 0,5 | 153,67 | 76,835 |
| Проверка пайки | 5 | 0,5 | 153,67 | 76,835 |
| Сборка | 5 | 1,5 | 153,67 | 230,505 |
| Контроль | 5 | 24 | 153,67 | 3688,08 |
| Маркировка | 4 | 0,1 | 107,28 | 10,7 |
| Упаковка | 4 | 0,3 | 107,28 | 32,184 |
| Итого: | 4143,039 | |||
| С учетом премии (40%): | 5800,25 | |||
Дополнительная заработная плата основных производственных рабочих рассчитывается по формуле:
 ,(7.7)
,(7.7)
гдеЗо – основная заработная плата;
Нд – процент отчислений в дополнительную заработную плата основных производственных рабочих, равняется 20%.
![]() руб.
руб.
Отчисления в фонд социальной защиты населения определяется по формуле:
 , (7.8)
, (7.8)
гдеНсоц – процент отчислений в фонд социальной защиты населения, равен 35%.
![]() руб.
руб.
Чрезвычайный чернобыльский налог и отчисления в фонд занятости определяется по формуле:
 , (7.9)
, (7.9)
гдеНчз – процент отчислений в чрезвычайный чернобыльский налог и в фонд занятости, равен 5%.
 руб.
руб.
Износ инструментов и приспособлений целевого назначения определяется по формуле:
![]() , (7.10)
, (7.10)
гдеНиз – процент отчислений на износ инструментов и приспособлений целевого назначения, равен 15%.
 руб.
руб.
Общепроизводственные расходы рассчитываются по формуле:
 , (7.11)
, (7.11)
гдеНобщ – процент отчислений на общепроизводственные расходы, равен 100%.
![]() руб.
руб.
Общехозяйственные расходы определяются по формуле:
![]() , (7.12)
, (7.12)
гдеНобх – процент отчислений на общехозяйственные расходы, равен 150%.
![]() руб.
руб.
Прочие производственные расходы определяются по формуле:
 , (7.13)
, (7.13)
гдеНпр – процент отчислений на прочие производственные расходы, равен 1%.
![]() руб.
руб.
Производственная себестоимость рассчитывается:
![]() (7.14)
(7.14)

Коммерческие расходы определяются по формуле:
 ,(7.15)
,(7.15)
гдеНком – процент отчислений на коммерческие расходы, равен 2%.
![]() руб.
руб.
Полная себестоимость изделия рассчитывается по формуле:
![]() , (7.16)
, (7.16)
![]() руб.
руб.
Плановая прибыль на единицу изделия определяется:
 , (7.17)
, (7.17)
гдеНед – процент отчислений на плановую прибыль на единицу изделия, равен 30%.
![]() руб.
руб.
Оптовая цена предприятия рассчитывается по формуле:
![]() , (7.18)
, (7.18)
![]() руб.
руб.
Отчисления в местный бюджет (сельхозналог, отчисления в ведомственный жилой фонд и инвестиционный фонд) определяются по формуле:
 , (7.19)
, (7.19)
гдеНмб – процент отчислений в местный бюджет, равен 2,5%.
 руб.
руб.
Отчисления в республиканский бюджет (поддержание производителей сельхозпродукции, дорожный фонд) определяются по формуле:
 , (7.20)
, (7.20)
гдеНрб – процент отчислений в республиканский бюджет, равен 2%.
![]() руб.
руб.
Итого основная цена без учета НДС определяется по формуле:
![]() , (7.21)
, (7.21)
![]() руб.
руб.
Налог на добавленную стоимость рассчитывается по формуле:
 ,(7.22)
,(7.22)
гдеНдс – процент отчислений на добавленную стоимость, равен 20%.
![]() руб.
руб.
Отпускная (свободная) цена определяется по формуле:
![]() (7.23)
(7.23)
![]() руб.
руб.
Результаты расчетов себестоимости и отпускной цены единицы продукции сведены в таблице 7.5.
Таблица 7.5 - Себестоимость и отпускная цена единицы продукции
|
Наименование статей Затрат |
Условное обозначение | Значение, тыс. руб. | Примечание |
| 1 | 2 | 3 | 4 |
| Сырье и материалы за вычетом отходов |
Рм |
0,0024 | См. табл. 7.2 |
| Покупные комплектующие изделия, полуфабрикаты |
Рк |
41,0 | См. табл. 7.3 |
| Основная заработная плата производственных рабочих |
Зо |
5,8 | См. табл. 7.4 |
| Дополнительная заработная плата производственных рабочих |
Зд |
1,16 | Формула 7.7 |
| Отчисления в фонд социальной защиты населения |
Рсоц |
2,44 | Формула 7.8 |
| Чрезвычайный чернобыльский налог и отчисления в фонд занятости |
Рчн |
0,35 | Формула 7.9 |
| Износ инструментов и приспособлений целевого назначения |
Риз |
0,87 | Формула 7.10 |
| Общепроизводственные расходы |
Робщ |
5,8 | Формула 7.11 |
| 1 | 2 | 3 | 4 |
| Общехозяйственные расходы |
Робх |
8,7 | Формула 7.12 |
| Прочие производственные расходы |
Рпр |
0,058 | Формула 7.13 |
| Производственная себестоимость |
Спр |
6,82 | Формула 7.14 |
| Коммерческие расходы |
Рком |
1,3 | Формула 7.15 |
|
Полная себестоимость |
Сп |
69,6 | Формула 7.16 |
| Плановая прибыль на единицу продукции |
Пед |
20,9 | Формула 7.17 |
| Оптовая цена предприятия |
Цопт |
90,5 | Формула 7.18 |
| Отчисления в местный бюджет |
Омб |
2,3 | Формула 7.19 |
| Отчисления в республиканский бюджет |
Орб |
1,8 | Формула 7.20 |
| Итого основная цена без учета НДС |
Ц* |
94,68 | Формула 7.21 |
|
Налог на добавленную стоимость (20% от Ц*) |
НДС | 18,94 | Формула 7.22 |
| Отпускная (свободная) цена |
Цотп |
113,6 | Формула 7.23 |
7.3 Расчет стоимостной оценки затрат
Единовременные затраты в сфере производства включают предпроизводственные затраты (Кпп.з.) и капитальные вложения в производственные фонды завода‑изготовителя (Кп.ф.):
![]() (7.24)
(7.24)
Предпроизводственные затраты определяются по формуле:
![]() , (7.25)
, (7.25)
где Sниокр – сметная стоимость НИОКР, руб.;
Косв – затраты на освоение производства и доработку опытных образцов продукции, изготовление моделей и макетов, руб.;
Кп.ф. – капитальные вложения в производственные фонды завода – изготовителя, равно нулю;
Косв равно нулю, так как технология изготовления продукции не требует значительных затрат на доработки и эти затраты можно отнести в статью общепроизводственные расходы.
![]()
КП=КППЗ
КП=2052 тыс. руб.
7.3.1 Сметная стоимость НИОКР
Заработная плата разработчиков с учетом отчислений от нее:
 , (7.26)
, (7.26)
где чр – число разработчиков;
tрj – трудоемкость работ выполняемых j – ым работником, дней;
ЗПднj – среднедневная заработная плата j – го работника, руб.;
Кд – коэффициент дополнительной заработной платы, равен 20%;
Кнз – коэффициент начислений на заработную плату, равняется 1,4.
Данные о заработной плате сотрудников НИР приведены в таблице 7.6.
Таблица 7.6 – Данные о заработной плате сотрудников НИР
| Виды работ | Исполнитель | Затраты труда, чел.‑дн. | Зарплата за день работы, тыс. руб. |
| Утверждение технического задания | Руководитель | 5 | 4,5 |
| Подбор и изучение литературы | Старший научный сотрудник | 45 | 4,0 |
| Разработка схем и исполнение чертежа | Инженерно ‑ технические работники | 60 | 3,0 |
![]() тыс. руб.
тыс. руб.
Услуги сторонних организаций Рус равны нулю.
Прочие прямые расходы рассчитываются по формуле:
 , (7.27)
, (7.27)
где Нпр – процент отчислений на прочие прямые расходы, равен 10%.
 тыс. руб.
тыс. руб.
Косвенные накладные расходы рассчитываются по формуле:
![]() , (7.28)
, (7.28)
где Нкос – процент отчислений на косвенные накладные расходы, равен 150%.
![]() тыс. руб.
тыс. руб.
Полная себестоимость сметы затрат НИР составит:
![]() , (7.29)
, (7.29)
гдеРм получаем из таблиц 7.2 и 7.3.
![]() тыс. руб.
тыс. руб.
Результаты расчета плановой (сметной) себестоимости и цены НИР и ОКР сведены в таблице 7.7.
Таблица 7.7 - Результаты расчета плановой (сметной) себестоимости и цены НИОКР
| Статьи затрат | Условное обозначение | Значение, тыс. руб. | Примечание |
| 1 | 2 | 3 | 4 |
| Материалы |
Рм |
43,07 | См. табл. 7.2, табл. 7.3 |
| Сметная стоимость ЗП разработчиков с отчис. | ЗП | 771,12 | Формула 7.26 |
| Услуги сторонних организаций |
Рус |
0 | |
| Прочие прямые расходы |
Рпр |
81 | Формула 7.27 |
| Косвенные накладные расходы |
Ркос |
1156,68 | Формула 7.28 |
| Полная себестоимость |
Сп |
2052 | Формула 7.29 |
7.4 Расчет экономического эффекта
В качестве прироста прибыли от производства принимается годовой прирост, остающейся в распоряжении предприятия.
Абсолютная величина прироста прибыли за год определяется по формуле:
 , (7.30)
, (7.30)
гдеНt - процент налога на прибыль в году t;
Nt – объём выпуска.
Пед – плановая прибыль на единицу продукции
Годовой прирост чистой прибыли от внедрения в первый год:
![]() тыс. руб.
тыс. руб.
В последующие годы:
 тыс. руб.
тыс. руб.
Экономический эффект можно расчитать по формуле:
![]() (7.31)
(7.31)
Расчет экономического эффекта приведен в таблице 7.10 Очевидно, что производство системы при выбранном объёме выпуска (80 шт.) в первый год будет убыточным. В последующие годы при объёме выпуска 160 шт. в год, изделие будет на пределе рентабильности. Рассчитаем минимальный необходимый объём выпуска, при котором производство системы будет иметь положительный экономический эффект:
Из формулы ( 7.30) получим:
 ,
,
откуда:
 (7.32)
(7.32)
из формулы (7.32) получим:
Для дальнейшего расчёта примем
Таблица 7.10 - Расчет экономического эффекта
| Показатель | Ед. | Расчетный период | |||||||||
| Разм. | 2001 | 2002 | 2003 | 2004 | |||||||
| Результат | |||||||||||
| Прогнозируемый объем производства | шт. | 140 | 140 | 140 | 140 | ||||||
| Себестоимость единицы | тыс. руб. | 69,5 | 69,5 | 69,5 | 69,5 | ||||||
| Годовой прирост чистой прибыли от внедрения | тыс. руб. | 2052 | 2052 | 2052 | 2052 | ||||||
| То же с учетом фактора времени | тыс. руб. | 2052 | 1436 | 1046 | 738,7 | ||||||
| Затраты | |||||||||||
| Смета затрат на НИОКР | тыс. руб. | 2052 | 0 | 0 | 0 | ||||||
| То же с учетом фактора времени | тыс. руб. | 2052 | 0 | 0 | 0 | ||||||
| Экономический эффект | |||||||||||
| Превышение рез-та над затратами | Тыс руб. | 0 | 1436 | 1046 | 738,7 | ||||||
| Коэффициент приведения | — | 1 | 0,7 | 0,51 | 0,36 | ||||||
В таблице 7.10 приведены данные, основанные на граничном условии рентабильности производства по первому году выпуска. Из расчётов следует, что производство не является целесообразным при объёме выпуска менее 140 систем в год.
Заключение
Разработанная в ходе дипломного проектирования система управления для установки подводного вытяжения позвоночника является полезным усовершенствованием, которое позволит значительно сэкономить время на подготовку к процедуре и обеспечить качественный контроль всех параметров процедуры. Разработка устройства проводилась на современной элементной базе и с использованием современных приёмов построения электрических схем. В ходе разработки устройства были использованы: система автоматического проектирования PCAD 8.5 и конструкторская программная среда AutoCAD 2000. Устройство удовлетворяет современным эргономическим требованиям, обеспечивает простоту и наглядность управления. Программируемый таймер обеспечивает автоматическое выполнение подготовительных операций и обеспечивает управление нагрузкой и её снятием по окончании процедуры. В таймере предусмотрены возможности изменения нагрузки во времени по различным законам, контроль и поддержание постоянной температуры воды, автоматическая замена воды после каждой процедуры. Задачей оператора является задание необходимых режимов работы и закрепления пациента на рабочем столе. Остальные действия выполняет программируемый таймер. Экономический эффект от производства невелик. Для рентабельности производства необходим выпуск около 140 устройств в год, однако в конечном итоге, ввиду того, что устройство обеспечивает лучшие показатели всего комплекса вцелом, система будет иметь спрос на мировом рынке.