
Рефераты по авиации и космонавтике
Рефераты по административному праву
Рефераты по безопасности жизнедеятельности
Рефераты по арбитражному процессу
Рефераты по архитектуре
Рефераты по астрономии
Рефераты по банковскому делу
Рефераты по сексологии
Рефераты по информатике программированию
Рефераты по биологии
Рефераты по экономике
Рефераты по москвоведению
Рефераты по экологии
Краткое содержание произведений
Рефераты по физкультуре и спорту
Топики по английскому языку
Рефераты по математике
Рефераты по музыке
Остальные рефераты
Рефераты по биржевому делу
Рефераты по ботанике и сельскому хозяйству
Рефераты по бухгалтерскому учету и аудиту
Рефераты по валютным отношениям
Рефераты по ветеринарии
Рефераты для военной кафедры
Рефераты по географии
Рефераты по геодезии
Рефераты по геологии
Рефераты по геополитике
Рефераты по государству и праву
Рефераты по гражданскому праву и процессу
Рефераты по кредитованию
Рефераты по естествознанию
Рефераты по истории техники
Рефераты по журналистике
Рефераты по зоологии
Рефераты по инвестициям
Рефераты по информатике
Исторические личности
Рефераты по кибернетике
Рефераты по коммуникации и связи
Рефераты по косметологии
Рефераты по криминалистике
Рефераты по криминологии
Рефераты по науке и технике
Рефераты по кулинарии
Рефераты по культурологии
Контрольная работа: Функціональні і структурні схеми систем радіоавтоматики
Контрольная работа: Функціональні і структурні схеми систем радіоавтоматики
Функціональні і структурні схеми систем радіоавтоматики
1. Система фазового автопідстроювання частоти (ФАПЧ)
У
системі АПЧ – керуюча напруга, пропорційна ![]() (w0-центральна частота), не в стані
звести до нуля розстройку по частоті Wс. Система АПЧ є статичною. Величина
статичної помилки пропорційна величині початкової неузгодженості по частоті.
(w0-центральна частота), не в стані
звести до нуля розстройку по частоті Wс. Система АПЧ є статичною. Величина
статичної помилки пропорційна величині початкової неузгодженості по частоті.
У системі ФАПЧ керуюча напруга пропорційна різниці фаз сигнальної й опорної напруги.
Ця напруга зводить до нуля початкову розстройку по частоті. Отже, у системі ФАПЧ відсутня статична помилка внаслідок інтегральної залежності різниці фаз від частотної розстройки. Система ФАПЧ є астатичною системою автоматичного регулювання.
Астатизм системи автоматичного регулювання визначається числом інтегруючих ланок. У системі ФАПЧ відбувається одне інтегрування, тому ФАПЧ – це система з астатизмом першого порядку.
Системи ФАПЧ широко застосовуються в радіотехнічних пристроях різного призначення.
Вони застосовуються як слідкувальні фільтри для відновлення носійної в радіоприймачі при односмуговій і балансовій модуляції; у системах передачі повідомлень методом фазової маніпуляції; для автоматичного підстроювання частоти і фази рядкового розгорнення в телевізорі; у системах кольорового телебачення з квадратурною модуляцією колірної піднесійної; для виділення сигналу на тлі шуму в доплеровських системах; для демодуляції сигналів з фазовою модуляцією; для побудови генераторів, що перестроюються по частоті, високостабільних коливань; у пристроях відтворення магнітного запису й в інших галузях.
У схемному відношенні система ФАПЧ відрізняється від системи АПЧ використанням замість частотного дискримінатора фазового дискрімінатора (рис.1).
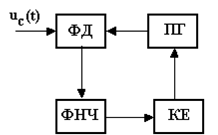
Рисунок 1 – Структурна схема системи ФАПЧ
Принцип дії системи ФАПЧ полягає в такому. Коливання сигналу ис(t) і генератора, що підстроюється, ПГ надходять на фазовий детектор ФД. При неузгодженості зазначених коливань по фазі на виході ФД з'являється напруга, яка, пройшовши через фільтр нижніх частот ФНЧ, впливає за допомогою керуючого елемента КЕ на частоту генератора, який підстроюється, ПГ так, що вихідна фазова неузгодженість зменшується.
При правильному виборі параметрів у системі ФАПЧ установлюється синхронний режим, у якому частота і фаза генератора, що підстроюється, стежить за частотою і фазою сигналу ис(t). Перехід до синхронного режиму роботи забезпечується в межах визначеного діапазону початкових розстроєк між частотами сигналу і генератора, що підстроюється, який називають смугою захоплення.
Складемо
структурну схему системи ФАПЧ. Різниця фаз ![]() j коливань, що подаються на
фазовий детектор, дорівнює j=jс-jм, де jз і jм – фази коливань сигналу і
генератора, що підстроюються, відповідно.
j коливань, що подаються на
фазовий детектор, дорівнює j=jс-jм, де jз і jм – фази коливань сигналу і
генератора, що підстроюються, відповідно.
Якщо не враховувати інерційності амплітудних детекторів, що входять до складу ФД, то його вихідна напруга записується так:
![]() ,
,
де F(j) і x(t) – відповідно математичне чекання і флуктуаційна складова вихідної напруги. Функція F(j), називається дискримінаційною характеристикою фазового детектора, є періодичною з періодом 2p. Її форма залежить від схеми ФД і співвідношення амплітуд вхідної напруги.
Керуюча напруга ud=uф, що знімається з виходу ФНЧ, зв'язана з напругою ud лінійним диференціальним оператором
![]() .
.
При
роботі на лінійній ділянці регулювальної характеристики генератора, що
підстроюється, його частота wг зв'язана з напругою uф ( лінійною залежністю ![]() ,
,
де
SP – крутість регулювальної
характеристики, wГс – значення власної частоти
генератора за відсутності керуючої напруги. Частота wГс з урахуванням її
нестабільності h визначається рівністю ![]() , де wГ0 – початкове значення частоти
гетеродина.
, де wГ0 – початкове значення частоти
гетеродина.
Оскільки на ФД напруга сигналу і гетеродина порівнюються по фазі, необхідно від частоти wГ генератора, що підстроюється, перейти до його фази:
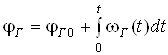 ,
,
де φг0 – початкова фаза коливань ПГ.
Структурна схема системи ФАПЧ, складена на підставі наведених співвідношень, має вигляд (рис. 2)

Рисунок 2 – Структурна схема системи ФАПЧ
Блок
![]() відображає в структурі
операцію інтегрування. Якщо ввести в розгляд нові змінні j1=jс-wГ0t-jГ0, j2=jГ-wГ0t-jГ0, то структурна схема спрощується і
набуває такого вигляду (рис.3):
відображає в структурі
операцію інтегрування. Якщо ввести в розгляд нові змінні j1=jс-wГ0t-jГ0, j2=jГ-wГ0t-jГ0, то структурна схема спрощується і
набуває такого вигляду (рис.3):

Рисунок 3 – Спрощена структурна схема системи ФАПЧ
2 Системи спостереження за часовим положенням імпульсного сигналу (системи АСД)
Системи спостереження за часовим положенням імпульсного сигналу застосовуються для автоматичного вимірювання дальності імпульсним радіолокатором; для виділення періодично повторюваних імпульсів на тлі перешкод у системах зв'язку з імпульсними піднесійними. Такі системи спостереження мають назву часових автоселекторів.
Функціональна схема системи подана на рис. 4. Радіолокаційний приймач відкривається (стробується) за допомогою часового автоселектора на короткі інтервали часу очікуваного приходу ехосигналу від обраної цілі. Ця міра підвищує завадостійкість прийому.
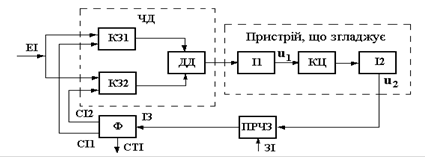
Рисунок 4 – Структурна схема часового авто селектора
Строб-імпульси формуються спеціальним формувачем Ф, що входить до складу часового автоселектора. До складу часового автоселектора входять також часовий дискримінатор ЧД, пристрій, що згладжує, пристрій регульованої часової затримки ПРЧЗ.
Поєднання в часі строб-імпульсів з ехосигналами цілі в кожному циклі зондування забезпечується роботою слідкувального автоселектора. З цією метою формувач Ф формує два селекторних імпульси СІ1 і СІ2. Імпульси прямокутної форми СІ1 і СІ2 розташовуються симетрично щодо середини строб-імпульсу і ідуть безпосередньо один за одним.
Згладжуючий пристрій містить два послідовно включених електронних інтегратори І1 і І2 і коригувальний RС - ланцюжок КЛ. Електронні інтегратори можна виконати, наприклад, на операційних підсилювачах.
Часовий дискримінатор містить два каскади збігів КЗ1 і КЗ2 на два входи кожен і диференціальний детектор ДД. Вихідна напруга каскадів збігів КЗ1 і КЗ2 утвориться в результаті збігу селекторних імпульсів СІ1 і СІ2 і ехосигналу цілі. Імпульси ІС1 і ІС2 детектуються і віднімаються в диференціальному детекторі, утворюють вихідну напругу дискримінатора.
Зондувальні імпульси ЗІ, що виробляються синхронізатором радіолокатора, запускають могутній імпульсний генератор, що формує радіоімпульси, випромінювані антеною, і одночасно запускають пристрій регульованої часової затримки ПРЧЗ автоселектора. Як ПРЧЗ можна використати, наприклад, фантастрон, пристрій часової затримки, що керується цифровим кодом.
Тривалість імпульсу затримки ІЗ, що виробляється фантастроном, залежить від величини керуючої напруги u2.
Від заднього фронту (спаду) імпульсу затримки запускається формуач селекторних імпульсів Ф. Перший селекторний імпульс формується мультивібратором, що очікує, а другий селекторний імпульс утвориться шляхом затримки першого на час, рівний його тривалості, за допомогою лінії затримки. При зміні керуючої напруги u2 селекторні імпульси зміщаються в часі щодо зондувального імпульсу в межах від нуля до 0,95Т3,, де Т3 – період повторення зондувальних імпульсів.
На часових діаграмах, що пояснюють функціонування автоселектора, ехоімпульс у момент часу t1 збігається з першим селекторним імпульсом СІ1. У результаті на виході каскаду збігів КЗ1 з'являється імпульс збігів ІЗ1, що зменшує по абсолютній величині напругу на виході першого інтегратора на величину Du1.1 У проміжку між імпульсами напруга на виході першого інтегратора зберігається постійною. Унаслідок зменшення напруги на виході першого інтегратора, вихідна напруга другого інтегратора, хоча і продовжує збільшуватися, але з меншою швидкістю.
В міру збільшення напруги на виході другого інтегратора зменшується тривалість імпульсу затримки З. Завдяки цьому в момент часу t2 селекторні імпульси СІ1 і СІ2 розташовуються відносно чергового ехоімпульса ЕІ так, що велика частина ЕІ перекривається з імпульсом СІ1, а менша - з імпульсом СІ2. Тепер утворяться два імпульси збігів, – ІЗ1 і ІЗ2, причому ІЗ1 має велику тривалість у порівнянні з ІЗ2. Імпульс ІЗ1 приводить до подальшого зменшення негативної напруги на виході першого інтегратора, а імпульс ІЗ2, навпаки, збільшує цю напругу. Оскільки тривалість ІЗ1 більше тривалості ІЗ2, то результуюча негативна напруга на виході першого інтегратора зменшується на величину Du1.2.
Однак
![]() . Напруга на виході другого
інтегратора, хоча і про-довжує збільшуватися, але з меншою швидкістю, ніж у
попередньому періоді. Збільшення напруги u2 приводить до подальшого
зменшення тривалості імпульсу затримки ІЗ, у результаті чого селекторні
імпульси в момент часу t3 виявляються так розташованими щодо
ехоімпульса, що межа їх розділу поділяє ехоімпульс навпіл. У результаті цього тривалості
імпульсів збігів ІЗ1 і ІЗ2 виявляються рівними, а збільшення напруги на виході
першого інтегратора дорівнює нулю. Отже, збільшення напруги на виході другого
інтегратора припиняється, також припиняється зміна тривалості імпульсу затримки
ІЗ і в системі встановлюється стан рівноваги. Величина напруги u2
пропорційна дальності до цілі, а величина напруги u1 на виході
першого інтегратора пропорційна швидкості цілі, якщо вона рухається.
. Напруга на виході другого
інтегратора, хоча і про-довжує збільшуватися, але з меншою швидкістю, ніж у
попередньому періоді. Збільшення напруги u2 приводить до подальшого
зменшення тривалості імпульсу затримки ІЗ, у результаті чого селекторні
імпульси в момент часу t3 виявляються так розташованими щодо
ехоімпульса, що межа їх розділу поділяє ехоімпульс навпіл. У результаті цього тривалості
імпульсів збігів ІЗ1 і ІЗ2 виявляються рівними, а збільшення напруги на виході
першого інтегратора дорівнює нулю. Отже, збільшення напруги на виході другого
інтегратора припиняється, також припиняється зміна тривалості імпульсу затримки
ІЗ і в системі встановлюється стан рівноваги. Величина напруги u2
пропорційна дальності до цілі, а величина напруги u1 на виході
першого інтегратора пропорційна швидкості цілі, якщо вона рухається.
У динаміці селекторні імпульси безупинно супроводжують ехоімпульс.
Під час руху цілі з постійною швидкістю в системі з двома інтеграторами ( з астатизмом другого порядку) помилка у визначенні швидкості і помилка у визначенні дальності ціль дорівнюють нулю. Але, якщо ціль рухається з прискоренням, з'являється помилка, пропорційна прискоренню. Для покращення якості перехідних процесів між інтеграторами включається корегуюче коло КК (форсуюча ланка). У ряді випадків для поліпшення завадостійкості включається також фільтр нижніх частот (інерційна ланка).
Захоплення цілі на початку роботи автоселектора виробляється або вручну оператором, що спостерігає оцінку цілі на екрані ЕЛПТ, або спеціальним автоматичним пристроєм пошуку і захоплення цілі.
У зв'язку з імпульсним характером сигналу інформація про неузгодженість Dt ( середини ехосигналу щодо стику селекторних імпульсів) утвориться в автоселекторі в дискретні моменти часу, що відстоять один від одного на період повторення зондувальних імпульсів. Тому, часовий автоселектор є дискретною (імпульсною) системою радіоавтоматики. Однак, якщо частота повторення зондувальних імпульсів велика в порівнянні з вищою частотою смуги пропущення автоселектора, що часто практикуєься, то можна вважати автоселектор безупинною системою. У такому припущенні побудуємо структурну схему автоселектора.
Часова неузгодженість Dt дорівнює: Dt=tc -tси.
При високій частоті повторення зондувальних імпульсів пульсації вихідної напруги часового дискримінатора, обумовлені імпульсним характером сигналу, ефективно згладжуються. У цьому випадку при аналізі автоселектора можна розглядати вихідну напругу дискримінатора, усереднену за період повторення імпульсів:
![]()
де F(Dt) і x(![]() ,Dt) – відповідно математичне чекання і флуктуаційна складова
вихідної напруги дискримінатора.
,Dt) – відповідно математичне чекання і флуктуаційна складова
вихідної напруги дискримінатора.
Форма дискримінаційної характеристики F(Dt) і параметри напруги x(t,Dt) залежать від співвідношення сигнал/шум, ширини смуги пропущення радіотракта, тривалості селекторних імпульсів і наявності амплітудних флуктуацій сигналу.
Перетворення напруги, що виконується пристроєм, що згладжує, визначається
лінійним диференціальним оператором, ![]() , що враховує
кількість інтегруючих ланок у складі автоселектора:
, що враховує
кількість інтегруючих ланок у складі автоселектора:
![]()
Звичайно
залежність величини затримки в схемі ПРЧЗ від керуючої напруги є безінерційною.
Якщо вона, крім того, лінійна, то виконується співвідношення ![]() , де SРЕГ –
крутість характеристики ПРЧЗ; tСИ0 – значення затримки за відсутності
керуючої напруги. Величина tСИ0 може мати деяку нестабільність, яку
необхідно враховувати при аналізі селектора.
, де SРЕГ –
крутість характеристики ПРЧЗ; tСИ0 – значення затримки за відсутності
керуючої напруги. Величина tСИ0 може мати деяку нестабільність, яку
необхідно враховувати при аналізі селектора.
Наведеним співвідношенням відповідає структурна схема на рис. 5.
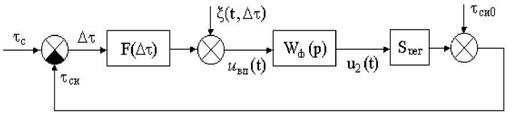
Рисунок 5 – Структурна схема слідкувальної системи
3 Системи автоматичного визначення напрямку на джерело радіохвиль (кутомірні слідкувальні системи, системи АСН)
У кутомірних слідкувальних системах, призначених для супроводу однієї цілі, звичайно використовується рівносигнальний метод пеленгування, при якому за допомогою антенної системи (А) формується рівносигнальна зона (РСЗ). Пеленгаційний пристрій (ПП) (рис. 6), що складається з антенної системи, радіоприймального тракту (РПТ) і вихідних каскадів (ВК), вимірює просторову неузгодженість j між віссю РСЗ zА і напрямком на ціль Ц, а виконавчий пристрій ВП змінює кутове положення вісі РСЗ так, щоб усунути наявну неузгодженість.
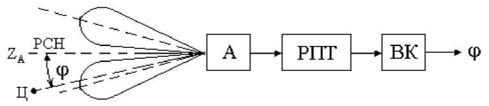
Рисунок 6 – Структурна схема пеленгаційного пристрою
Побудова пеленгаційного пристрою залежить від прийнятого способу формування рівносигнальної зони. У пеленгаційних пристроях з послідовним порівнянням сигналів застосовується один приймач і одна антена. Діаграма спрямованості антени переміщається в просторі (сканує) з періодом ТСК. Вимір кутової неузгодженості виконується порівнянням огинаючої радіосигналу, що періодично змінюється з опорною синусоїдною напругою, синхронізованою і синфазированою з обертанням діаграми спрямованості. Час виміру порівнянний із ТСК. Прикладом автокутоміру такого типу є система з конічним скануванням діаграми спрямованості.
Недоліком систем з послідовним порівнянням сигналів є їхня чутливість до змін рівня сигналу, що здійснюється протягом періоду сканування і не відпрацьовується системою АРП.
Зазначені зміни, спричиняються флуктуаціями амплітуди ехосигналу і дією активних перешкод з амплітудною модуляцією, близькою по частоті до частоти сканування, знижують точність пеленгування. Цього недоліку позбавлені значною мірою системи з одночасним порівнянням сигналів, тому вони одержали найширше поширення.
У пеленгаційних системах з одночасним порівнянням сигналів, які називаються також моноімпульсними, використовується антенна система, що формує чотири окремі (парціальні) діаграми спрямованості, і багатоканальний приймач. Кутова неузгодженість визначається в результаті зіставлення одночасно прийнятих сигналів. Час виміру порівнянний з часом обробки сигналів у прийомному тракті, тобто досить мало. У моноімпульсних автопеленгаторах використовуються амплітудний, фазовий і амплітудно-фазовий методи пеленгування цілі.
Розглянемо спрощену схему амплітудного сумарно-різницевого пеленгатора, що застосовується до пеленгації в одній площині (рис. 8) У результаті підсумовування і віднімання парціальних uП1(t) і uП2(t) на виході антенно-хвилєводного тракту утворяться сумарний uS(t) і різницевий uD(t) сигнали. Залежність сумарної напруги uS(t) від кутового відхилення джерела сигналу визначається сумарною діаграмою спрямованості, що виражається через парціальні діаграми спрямованості співвідношенням
![]()
Аналогічно залежність різницевої напруги uD(t) визначається різницевою діаграмою спрямованості.
![]()
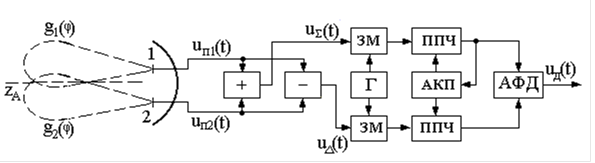 Рисунок 7 – Спрощена
структурна схема амплітудного сумарно-різницевого пеленгатора
Рисунок 7 – Спрощена
структурна схема амплітудного сумарно-різницевого пеленгатора
На рис. 7 " + " - суматор сигналів; " - " – обчислювач сигналів; ЗМ – змішувачі; Г – гетеродин; ППЧ – підсилювачі проміжної частоти; АРП – блок автоматичного регулювання посилення; АФД – амплітудно-фазовий детектор; " 1 " і " 2 " – випромінювачі антени; ZA рівносигнальний напрямок антени.
Форма сумарної і різницевої діаграм спрямованості показана на рис. 8 суцільними лініями. Пунктиром зображені парціальні діаграми спрямованості в одній із площин.
При зміні знака різницевої діаграми спрямованості фаза різницевої напруги змінюється на 180°.
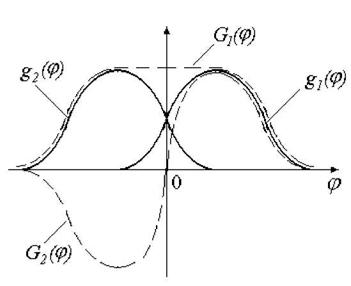
Рисунок 8 – Діаграми спрямованості
Сформовані на виході антенно-хвилєводного тракту сумарна і різницева напруга uS(t) і uD(t) надходять у відповідні канали приймального пристрою, де перетворюються по частоті, підсилюються і подаються на амплітудно-фазовий детектор.
Як видно, різницева діаграма має дискримінаційні властивості по куту. Амплітуда різницевої напруги при малих кутах неузгодженості пропорційна величині кутового відхилення, а полярність (фаза) визначається знаком цього відхилення. Тому в результаті перемножування із сумарним в АФД на його виході з'являється постійна напруга, що залежить від величини і знака кутової неузгодженості.
Неідентичність фазових і амплітудних характеристик сумарного і різницевого каналів не викликає в пеленгаторі сумарно-різницевого типу зсуву нуля пеленгаційної характеристики. У зв'язку з цим вимоги до ідентичності і стабільності приймальних каналів знижуються.
Застосування АРП, що працює по вихідній напрузі ППЧ сумарного каналу, дозволяє послабити вплив змін амплітуди сигналу на характеристики пеленгатора.
У
разі відсутності перешкод і ідеальній роботі АРП пеленгаційна характеристика не
залежить від амплітуди сигналів і пропорційна відношенню ![]() різницевої і сумарної
діаграм спрямованості.
різницевої і сумарної
діаграм спрямованості.
Після згладжування і посилення по потужності вихідна напруга АФД як керуюча підводиться до виконавчого пристрою, що переміщає дзеркало антени.
Структурна схема азимутального каналу кутомірної системи (рис. 9) містить блоки з передатними функціями WПУ(s) і WИУ(s) пеленгаційного і виконавчого пристроїв відповідно. Сигнал неузгодженості j є різниця, j=qЦ –– qZ, де qц – напрямок на ціль, qz - напрямок осі Z. Збурювання n(t) є випадковим впливом, обумовлений внутрішнім шумом радіоприймача, перелічене до кутового відхилення.
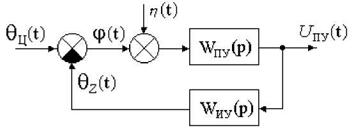
Рисунок 9 – Структурна схема кутомірної системи
4. Системи автоматичного регулювання посилення (АРП)
Призначення АРП – стиск динамічного діапазону вхідного сигналу (сягаючого значень 80 – 100 дб) до 3 – 5 дб на виході додетекторного тракту радіоприймача. Це необхідно для виключення амплітудних перекручувань, що виникають при перевантаженні радіоприймального тракту. Зокрема, система АРП стабілізує коефіцієнт передачі дискримінатора в розглянутих системах радіоавтоматики, тобто виключає залежність цього коефіцієнта від амплітуди радіосигналу на вході приймача. Ця операція називається нормуванною.
Розрізняють системи АРП "уперед" і "назад" (рис. 10).
У системі АРП "уперед" вихідна напруга нерегульованих каскадів НК після детектування надходить через фільтр нижніх частот ФНЧ на наступні регульовані каскади РК, коефіцієнт підсилення яких змінюється відповідно до напруги регулювання (зменшується при збільшенні Uрег). Підбором залежності коефіцієнта підсилення від Uрег домагаються стабілізації вихідної напруги радіоприймача на визначеному рівні. Це система без зворотного зв'язку з усіма властивими даному принципу регулювання недоліками.
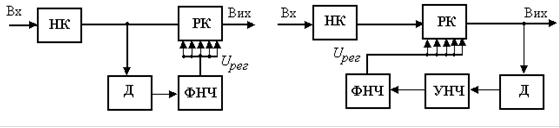
Рисунок 10 – Структурні схеми систем АРУ
У системі АРП "назад" вихідна напруга після посилення в нерегульованих і регульованих каскадах, детектування і наступного посилення надходить через фільтр нижніх частот назад для регулювання коефіцієнта підсилення попередніх (регульованих) каскадів. З ростом напруги UРЕГ коефіцієнт підсилення зменшується. Це система зі зворотним зв'язком. Особливість її полягає в тому, що ефект регулювання досягається в ній за рахунок зміни параметра – коефіцієнта підсилення.