
Рефераты по авиации и космонавтике
Рефераты по административному праву
Рефераты по безопасности жизнедеятельности
Рефераты по арбитражному процессу
Рефераты по архитектуре
Рефераты по астрономии
Рефераты по банковскому делу
Рефераты по сексологии
Рефераты по информатике программированию
Рефераты по биологии
Рефераты по экономике
Рефераты по москвоведению
Рефераты по экологии
Краткое содержание произведений
Рефераты по физкультуре и спорту
Топики по английскому языку
Рефераты по математике
Рефераты по музыке
Остальные рефераты
Рефераты по биржевому делу
Рефераты по ботанике и сельскому хозяйству
Рефераты по бухгалтерскому учету и аудиту
Рефераты по валютным отношениям
Рефераты по ветеринарии
Рефераты для военной кафедры
Рефераты по географии
Рефераты по геодезии
Рефераты по геологии
Рефераты по геополитике
Рефераты по государству и праву
Рефераты по гражданскому праву и процессу
Рефераты по кредитованию
Рефераты по естествознанию
Рефераты по истории техники
Рефераты по журналистике
Рефераты по зоологии
Рефераты по инвестициям
Рефераты по информатике
Исторические личности
Рефераты по кибернетике
Рефераты по коммуникации и связи
Рефераты по косметологии
Рефераты по криминалистике
Рефераты по криминологии
Рефераты по науке и технике
Рефераты по кулинарии
Рефераты по культурологии
Курсовая работа: Построение системы автоматического контроля
Курсовая работа: Построение системы автоматического контроля
ВВЕДЕНИЕ
Значительные изменения во многих областях науки и техники обусловлены развитием электроники. В настоящее время невозможно найти какую-либо отрасль агропромышленного комплекса, в которой не использовались бы электронные приборы или электронные устройства измерительной техники, автоматики и вычислительной техники. Причём тенденция развития такова, что доля электронных информационных устройств и устройств автоматики непрерывно увеличивается. Это является результатом развития интегральной технологии, внедрение которой позволило наладить массовый выпуск дешёвых, высококачественных, не требующих настройки и наладки микроэлектронных функциональных узлов различного назначения.
Промышленность выпускает почти все электронные функциональные узлы, необходимые для создания устройств измерительной и вычислительной техники, а также систем автоматики: интегральные электронные усилители электрических сигналов: коммутаторы; логические элементы; перемножители электрических напряжений; триггеры; счётчики импульсов; регистры; сумматоры и т. д.
Широко практикуется использование базовых матричных кристаллов и программируемых функциональных возможностей интегральных схем. В массовом количестве изготовляются единые матрицы нескоммутированных (не соединённых между собой) элементов. Электрические связи между ними выполняются индивидуально на этапе формирования разводки, исходя из требований заказчика. Изготовив базовую матрицу или программируемую логическую матрицу одного типа, на её основе можно создать сотни разнообразных функциональных узлов различного назначения. Причём различие между базовыми матричными кристаллами и логическими программируемыми матрицами заключается в том, что в последних соединениях можно не только создавать, но и разрушать.
Созданы также более простые полузаказные интегральные схемы, содержащие наборы элементов. Из них могут быть получены и аналоговые устройства, например усилители электрических сигналов. Это позволяет снизить затраты на проектирование и производство электронных устройств различного назначения и уменьшить сроки их внедрения в серийное производство.
В развитии электроники на протяжении многих лет остаётся стабильным только одно - это непрерывное изменение элементной и схемотехнической баз.
В связи с широким выбором интегральных схем, параметры которых известны из технических условий, изменились задачи, стоящие перед разработчиками электронной аппаратуры. Если раньше значительная часть времени уходила на расчёты режимов отдельных каскадов, определение их параметров, решение вопросов термостабилизации и т. д., то в настоящее время и взаимного согласования микросхем.
Типовые микроузлы позволяют собрать нужный электронный блок без детального расчёта отдельных каскадов. Разработчик электронной аппаратуры, определив, какие преобразования должен претерпеть электрический сигнал, подбирает необходимые интегральные микросхемы, разрабатывает схему их соединений и вводит обратные связи требуемого вида. И только в том случае, когда выпускаемые интегральные микросхемы не позволяют решить какой-то конкретный вопрос, к ним добавляют отдельные узлы на дискетных компонентах, требующие проведения соответствующих расчётов, или разрабатывают микросхемы частного применения.
Стремительные темпы компьютеризации всех сторон человеческой деятельности, массовость их применения привели к тому, что сегодня ЭВМ, и, прежде всего персональные компьютеры (ПК), стали непременным атрибутом самых различных технических комплексов. Это касается и современных систем управления и сбора данных, контрольно-измерительного и лабораторного оборудования, т.е. любых комплексов, основной задачей которых является обработка и интерпретация информации, поступающей из “внешнего мира”.
Сегодня практически все системы такого рода, за исключением сугубо специализированных систем, построенных на основе специализированных процессоров, оснащены персональными компьютерами – главным образом машинами семейства IBM PC или их аналогами. В результате перед разработчиками и пользователями любой подобной системы встает задача адекватной стыковки устройств, воспринимающих информацию из внешнего мира, а именно датчиков различного типа, с персональным компьютером, являющимся центральным узлом такой системы и выполняющим задачи координации работы системы, обработки поступающей информации и выдача ее пользователю в наиболее удобной для него форме.
Трудности реализации интерфейсных средств, встающие перед разработчиками, заключаются главным образом в том, что датчики и другие чувствительные устройства, как правило, имеют разнородные выходы, и для подключения к вычислительному оборудованию необходимо использовать или создавать специальные схемы преобразования сигналов, согласующие устройства, кодирующие преобразователи и т.д. Большинство систем с датчиками вырабатывают аналоговые напряжения, которые должны быть преобразованы в цифровые сигналы, прежде чем они могут быть введены в ЭВМ.
Измерительные преобразователи осуществляют преобразование измеряемых физических переменных в выходные электрические сигналы. С выхода датчика электрический сигнал поступает в согласующие схемы, где он готовится для дальнейшего преобразования в цифровую форму и передачи в IBM PC.
Совершенствование полупроводниковой технологии позволило также расширить сферы применения датчиков к тому же повысить их точность, быстродействие, надежность, долговечность, удобство сопряжения с электронными измерительными схемами. Массовый характер производства датчиков способствует снижению цены, что также является немаловажным фактором, определяющим их внедрение в практику.
По определению одного из основоположников техники измерения физических величин А.М. Туричина (1968 г.) к датчикам относятся все основные узлы электронной схемы для измерения неэлектрических величин, расположенные непосредственно у объекта. Необходимость преобразования измеряемой неэлектрической величины в адекватный электрический сигнал послужила позднее основанием для введения термина «измерительный преобразователь», рекомендованного государственной системой обеспечения единства вместо термина «датчик».
В русле общего направления технического прогресса существенные изменения претерпели также и датчики. На смену электромеханическим и электровакуумным устройствам пришли твердотельные (полупроводниковые, сегнетоэлектрические и т.п.) элементы и приборы, которые затем все больше и больше стали вытесняться интегральными схемами. Развитие техники детектирования магнитных и электрических полей, электромагнитных волн (от ИК- до УФ-диапазона), малых количеств примеси в жидких и газообразных средах существенно расширили возможности измерений на удаленных, труднодоступных, движущихся и т.п. объектах. Это сделало необязательным расположение датчиков непосредственно у объекта.
Общие тенденции к миниатюризации и компьютеризации коснулись, безусловно, и рассматриваемой области техники. При этом сигнал датчика, в большинстве случаев аналоговый, для обработки в микропроцессоре или в микроЭВМ должен быть представлен в цифровом виде. Это осуществляется обычным интерфейсным устройством, включающим в себя АЦП. В последнее время наряду с созданием датчиков, имеющих цифровой выходной сигнал, наблюдается тенденция к конструктивному объединению датчиков с микропроцессорными устройствами.
Задачей данного курсового является построение системы автоматического контроля и управления такими параметрами окружающей среды, как температура, влажность, освещенность и давление.
Эффективность управления тепло и такой системы в значительной степени зависит от аппаратурного решения используемых систем управления. Современные достижения науки и техники позволяют использовать для этого новую аппаратуру контроля и управления, основанную на применении микропроцессорной техники.
Применение микропроцессоров и микро-ЭВМ при автоматизации контроля и управления в современной технике позволяет осуществлять эффективную обработку первичной информации и реализовать сложные алгоритмы управления, приближающиеся к оптимальным, улучшать многие технические параметры системы, придав им ряд новых функций.
При разработке микропроцессорных систем необходимо решить ряд задач по обоснованию и выбору алгоритмов обработки информации, разработке программного обеспечения. При этом существенное значение приобретают вопросы получения объективной информации о состоянии контролируемого объекта.
При использовании средств распределенного контроля режимных параметров микроклимата объектов окружающей среды, объем и достоверность полученной информации определяется необходимым количеством датчиков, цикличностью и способом их опроса. В задачу контроля входит не только замер параметров микроклимата в дискретных точках исследуемого объекта, но и оперативная обработка полученной информации в форме, удобной для ввода в управляющее устройство при выработке регулирующего воздействия. В этих условиях наиболее целесообразно использовать интегральные представления полученной информации.
1. ОБЗОР ЛИТЕРАТУРЫ
1. В книге [1] рассматриваются аппаратные и программные средства сопряжения самых разнообразных датчиков с персональными компьютерами фирмы IBM. Для каждого типа датчиков приводятся электронные схемы, предназначенные для обработки его выходного сигнала перед подачей в компьютер. Для иллюстрации принципов сбора и применения информации, поступающей от датчиков, включены примеры использования конкретных датчиков вместе с компьютерными программами. Большинство систем с датчиками вырабатывают аналоговые напряжения, которые должны быть преобразованы в цифровые сигналы, прежде чем они могут быть введены в ЭВМ. В настоящей книге рассматривается конструкция функционально законченной системы сбора и преобразования данных.
В главе 1 рассматриваются различные схемы на основе операционных усилителей, которые полезны для разработки усилительных схем, схем защитного экранирования и ряда других электронных схем, необходимых для обеспечения сопряжения с аналоговыми датчиками.
В главе 2 содержится практическая информация о способах снижения электрических помех в аналоговых и цифровых схемах. Здесь же обсуждаются источники питания.
В главе 3 объясняются принципы функционирования системной шины IBM PC и рассматривается базовый аппаратный интерфейс, с которым связаны все другие конструкции, представленные в данной книге. Рассматривается так же работа системы прерываний, счетчиков и таймеров.
В главе 4 излагается теория и практические аспекты преобразования сигналов, рассматриваются виды двоичных кодов, принципы дискретизации сигналов и цифро-аналоговые преобразователи.
В главе 5 идет речь о выборе и использовании аналого-цифровых преобразователей.
В главе 6 рассматривается универсальный последовательный интерфейс для сопряжения с IBM PC и другими аналоговыми микрокомпьютерными системами.
В главах 7, 8, 9, 10 описываются датчики температуры, датчики фотонов элекромагнитного излучения, датчики перемещения, различные типы датчиков потока и способы их сопряжения с IBM PC.
В главе 11 представлено многочисленное семейство внешних устройств, с помощью которых пользователь может управлять работой компьютера, минуя клавиатуру.
Именно из этой книги для меня явилось полезным использование датчиков температуры и освещенности, а также использование интерфейса RS-232C.
2. В книге [2] достаточно подробно изложены сведения о функциональных узлах и компонентах, применяемых в приборостроении, автоматике, вычислительной технике. Приведённый материал знакомит с наиболее распространенными типами элементов и компонентов, также приведены формулы расчёта параметров основных узлов используемых в электронике. Рассмотрены принципы построения генераторов электрических импульсов. В данном курсовом проекте использовался материал, изложенный в книге о генераторах напряжения прямоугольной формы (мультивибраторах) на основе логических элементов.
3. Cправочник [3] ознакамливает с основами построения цифровых интегральных микросхем и с наиболее распространенными их сериями малого и среднего уровня интеграции.
В первой главе справочника приведены общие сведения о цифровых интегральных схемах и конструктивных особенностях. Во второй – интегральные схемы транзисторно-транзисторной логики. В третьей описаны наиболее распространенные цифровые интегральные схемы на основе КМДП-транзисторов. Четвёртая глава знакомит с самыми быстродействующими микросхемами на основе эмиттерно-связанной логики. Пятая глава посвящена интегральной инжекционной логике. Приведены основные параметры рассматриваемых интегральных схем, которые сведены в таблицы по разделам.
Для более полного понимания работы микросхем среднего уровня интеграции во многих случаях приводятся их структурные схемы, а также принципиальные схемы основных элементов. В частности, в курсовом проекте использовались такие микросхемы как: К561ЛН2, К561ЛА7, К561ЛА9, К561ИЕ10, К561КП2, К561ИР2 информация о которых приведена в третьей главе книги.
4. В основу изложения материала в книге [4] положен принцип функционального описания основных свойств, характеристик и параметров, режимов работы современных цифровых микросхем и микроэлектронных преобразователей. Описаны физические и важнейшие схемотехнические принципы, лежащие в основе работы этих микросхем, что, по мнению авторов, должно способствовать лучшему пониманию особенностей работы микросхем и более эффективному использованию их функциональных возможностей.
В книге рассмотрены цифровые микросхемы, БИС памяти, микросхемы ЦАП и АЦП, составляющие основу цифровой микроэлектронной базы современной аппаратуры.
Приведенные характеристики и параметры микросхем систематизированы по функциональным подгруппам и видам, что позволяет читателю получить достаточно полное представление о возможностях микросхем рассмотренных видов и их месте в обширной номенклатуре современных микроэлектронных изделий.
Наряду с данными справочного характера в книге уделено внимание вопросам описания принципа работы микросхем, их конструктивного оформления, построения на их основе различных функциональных узлов, а также рекомендациям по выбору микросхем для реализации схемотехнических решений.
Настоящий справочник входит в серию книг "Изделия электронной техники", описывающих современную элементную базу.
В частности, в курсовом проекте была использована микросхема АЦП К572ПВ4.
5. Справочник [5] представляет собой пятый том многотомного издания, посвященного интегральным схемам. В первом разделе приведены общие сведения об интегральных схемах: классификация и система условных обозначений, принципы построения условных графических обозначений в схемах, наименование и буквенные обозначения параметров, используемые внутри страны и за рубежом, габаритные размеры стандартизованных корпусов, виды корпусов для автоматизированной сборки и поверхностного монтажа и особенности применения. Во втором разделе даются (в цифровой последовательности, начиная с серии К544) состав серии, функциональное назначение, степень интеграции (количество интегральных элементов), тип корпуса и его масса, назначение выводов, электрические (в том числе справочные, классификационные) параметры и предельно допустимые режимы эксплуатации, условные графические обозначения, структурные или типовые схемы включения, таблицы истинности, рекомендации по применению в соответствии с частными техническими условиями (ТУ) аналоговых и цифровых интегральных микросхем, изготовленных по различным схемно-технологическим решениям (транзисторно-транзисторная логика—ТТЛ; транзисторно-транзисторная логика с диодами Шоттки—ТТЛШ; эмиттерно-связанная транзисторная логика—ЭСЛ, по биполярной и МОП технологиям).
6. Справочник [6]. Резисторы, конденсаторы, трансформаторы и дроссели, изделия коммутации образуют большую группу пассивных элементов, основным свойством которых является выполнение простейших операций (увеличение сопротивления протекающему току, накопление заряда, концентрация электромагнитной энергии и т. п.). Пассивные элементы наряду с активными (электровакуумными приборами, транзисторами) и интегральными схемами являются комплектующими изделиями производства электронной промышленности и радиолюбительских конструкций. В связи с бурным развитием электроники потребность в пассивных элементах возрастает.
Курс на микроминиатюризацию, снижение массы и габаритов, повышение стойкости к внешним факторам, надежности предъявляет повышенные требования и к пассивным элементам. В последние годы разработан ряд новых элементов с улучшенными электрическими и эксплуатационными характеристиками, приспособленными для монтажа на печатных платах.
Многообразие существующих пассивных элементов и появление новых, разбросанность данных о них в специализированных справочниках, каталогах, журналах в известной степени затрудняют работу при конструировании, ремонте и эксплуатации электронной аппаратуры.
Справочник представляет собой достаточно полное издание по значительному числу элементов, таких как резисторы, конденсаторы, унифицированные трансформаторы питания, унифицированные согласующие трансформаторы, низкочастотные дроссели, реле постоянного тока и поляризованные, магнитоуправляемые контакты, переключатели.
Материал справочника распределен на четыре раздела, указанных в названии книги. В начале каждого раздела приводится классификация пассивного элемента, система условных обозначений, основные параметры. Основной материал справочника включает в себя данные по электрическим и эксплуатационным параметрам пассивных элементов. В нем приводятся также рисунки элементов, габаритные размеры и масса.
Для сложных пассивных элементов, таких как трансформаторы, реле, переключатели, приведены рекомендации по выбору, проверке и монтажу.
Справочные материалы составлены на основе данных, указанных в Государственных стандартах и технических условиях. В ряде случаев для сложных элементов даны разъяснения важнейших терминов и параметров.
7. Книга [7] посвящена схемотехнике самых массовых серий микросхем — цифровых малой и средней степени интеграции. Известно, что в аппаратуре доминируют три вида таких микросхем: ТТЛ, КМОП и ЭСЛ. Их выпускают сотнями миллионов штук в год. Возможно, многие из них будут изготавливать до конца столетия.
В каждом из трех видов микросхем существуют преемственно развивающиеся серии. Имея описание микросхемы, можно реализовать ее свойства полностью. Каждая группа микросхем (к примеру, счетчиков, регистров) имеет сейчас много схемотехнических применений. Варианты схемотехники отображают как ход развития микросхем, так и расширение запросов потребителей.
Книга состоит из трех глав. Глава первая — наибольшая по объему, поскольку посвящена микросхемам ТТЛ. В ней рассмотрена не только их номенклатура, но и даны некоторые теоретические сведения (например, о триггерах), общие и для двух других глав.
Во второй главе описаны самые экономичные массовые микросхемы логики КМОП. Отметим, что микросхемы КМОП разрабатывали после внедрения в аппаратуру первых серий ТТЛ, поэтому во многом копировали их структуру. Микросхемы КМОП почти не потребляют энергию от источника питания, когда сигналы не поступают, т. е. во время ожидания. При обработке сигналов ток потребления микросхем тем больше, чем выше скорость работы устройства. Микросхемы ТТЛ потребляют статический ток, сравнимый по силе с динамическим. Отметим, что на предельных скоростях работы токи потребления как для микросхем КМОП, так и для ТТЛ сопоставимы по уровням.
Следует подчеркнуть, что в ряде стран выпускаются особые серий микросхем КМОП с шифром 74С (здесь цифра 74 заимствуется от названия массовых серий ТТЛ, буква С — от сокращения СМОS, в русском варианте — КМОП)
Микросхемы серии 74С по уровням электрических сигналов, напряжению питания, структуре и цоколевке в точности соответствуют микросхемам ТТЛ серии 74LS (т. е. отечественной серии К555). Более новые, высококачественные варианты, называемые 74НС (Н—high), соответствуют серии 74LS и по быстродействию, они постепенно вытесняют ее из многих видов цифровой аппаратуры.
В третьей главе рассмотрены микросхемы ЭСЛ. Это самая скоростная логика является, пожалуй, самой спорной. Потребителей отпугивает очень большая рассеиваемая мощность. Однако разработчики ЭСЛ много раз «спасали» эту логику от наступления ТТЛ, открывая с ее помощью новые возможности увеличения быстродействия цифровых устройств. В настоящее время быстродействие ЭСЛ достигло субнаносекундного диапазона (серия К1500), а перспективные серии ТТЛ работают пока еще со скоростью в 3...4 раза меньшей.
В книге используются таблицы номенклатуры и таблицы состояний. В таблицах номенклатуры перечисляются отечественные микросхемы, приводятся их зарубежные аналоги. В каждую таблицу сводятся микросхемы определенного типа для нескольких сходных серий. Наличие микросхемы в серии отмечается крестиком. Таблицы состояний отображают логические функции микросхем. Здесь, как и на принципиальных схемах, использованы мнемонические обозначения, которые сведены в табл. П.1, приведенную в Приложении книги.
Зная буквенно-цифровое обозначение, с помощью табл. П.2 можно найти в этой книге интересующую микросхему ТТЛ серий К155, К555, К531, КР1533 и КР1531. В таблице микросхемы перечислены в алфавитном порядке букв, входящих в их обозначение.
Наименования отечественных цифровых микросхем отличаются от соответствующих зарубежных. Вместе с тем в иностранных радиолюбительских журналах, а также в переводных изданиях можно найти много полезных вариантов применения микросхем. С целью ориентировки, в зарубежных названиях микросхем ТТЛ в табл. П.3 показана связь их с отечественными аналогами. Таблица П.4 поможет найти в книге микросхемы КМОП серий К176 и К561 по их буквенно-цифровому обозначению. С соответствием наименований зарубежных и отечественных микросхем КМОП можно ознакомиться по табл. П.5. Микросхемы ЭСЛ наносекундной (К500) и субнаносекундной серий (К1500) можно отыскать по табл. П.6 и П.7, где они перечисляются в порядке возрастания их условных номеров.
8. В справочнике [8] большое внимание уделено одному из самых перспективных направлений микроэлектроники - микропроцессорным комплектам (МПК). Значительное место занимают технические характеристики и функциональные особенности основных перспективных серий однокристальных микроЭВМ.
Наряду с материалом по цифровым микросхемам большой раздел посвящен аналоговым микросхемам.
В разделе по конструктивно-технологическому применению описаны конструкции корпусов микросхем, предназначенные для поверхностного монтажа, и особенности технологии. Из этого справочника я извлек правильное условно-графическое изображение и технические характеристики элементов, используемых в схеме разрабатываемого устройства.
9. Cправочник [9] написан с использованием материалов стандартов. В одних случаях – это таблицы значений, в других – сведения реферативного характера, дающие представления о содержании стандарта и порядке установленных величин. Он содержит все изменения и дополнения, обусловленные развитием стандартов.
В книгу включены сведения об отечественных технических и программных средствах автоматизации разработки и выполнения конструкторских документов, о подходе к организации работ по автоматизации. Приведены примеры чертежей, выполненных автоматизировано, на основе которых сделаны обобщения и даны рекомендации для разработки систем автоматизации конструкторской документации. Справочник иллюстрирован конструкторскими документами на изделия радиопромышленности с методическими пояснениями к ним.
10. В книге [10] рассматриваются особенности схемотехники и применения микроэлектронных средств обработки аналоговых сигналов: операционных усилителей, перемножителей, компараторов напряжения, аналоговых таймеров, схем дискретизации, АЦП и ЦАП, однокристальных систем сбора-обработки сигналов, аналоговых микропроцессоров, выпускаемых отечественной промышленностью. Значительное внимание уделяется цифровой обработке аналоговых сигналов с применением микропроцессоров. Описываются конкретные примеры построения аналого-цифровых систем. В курсовом проекте была использована микросхема АЦП К572ПВ4, основные параметры которой и отражены в этой книге.
11. Книга [11] представляет собой обзор устройств и применение современных датчиков, в том числе датчиков температуры, давления, параметров светового излучения, характеристик жидкостей и др. Отсюда я использовал датчики давления, влажности и температуры.
12. Книга [12] посвящена проблеме разработки аппаратуры и программного обеспечения для сопряжения ПК типа IBM PC с различными внешними устройствами, возникающик при создании компьютерных систем и сетей. Приведены справочные данные по интерфейсам ISA, Centronics, RS-232C, а также типичные схемотехнические решения позволяют проектировать устройства сопряжения в наибольшей степени соответствующие конкретной задаче и удовлетворяющие требованиям стандартов.
13. В книге американских авторов [13] детально проанализированы особенности архитектуры и функционирования микропроцессорных систем, необходимые для организации интерфейса с ОЗУ, ПЗУ и другими внешними устройствам, включая семисегментный индикатор, АЦП и ЦАП. Основное внимание уделено описанию особенностей технических средств и способов их применения при расширении микропроцессорных систем. В данном курсовом проекте использованы отсюда сведения про последовательный интерфейс с ЭВМ, включая принципы преобразования уровней сигналов в соответствии со стандартом RS-232.
14. В журнале [14] приведены схемы, описания их функционирования, технические параметры и характеристики, а также различная информация по программированию, компьютерным играм, ряд важных советов в области применения компьютера. Основой моего курсового проекта послужила схема устройства сопряжения с компьютерами через последовательный порт.
2. ОБОСНОВАНИЕ ВЫБОРА СТРУКТУРНОЙ СХЕМЫ
Выбор структурной схемы для любого устройства производится исходя из назначения проектируемого устройства. На этапе составления структурной схемы разработчик только намечает самые крупные блоки и связи между ними.
Структурная схема разработанного устройства (см. приложение 1) состоит из следующих блоков:
1. Датчики первичной информации – температуры, влажности, освещенности и давления.
2. Усилители – осуществляют усиление аналоговых сигналов.
3. Генератор - предназначен для тактирования цифровых узлов устройства.
4. Счетчик подсчитывает количество импульсов пришедших на вход.
5. Коммутатор – осуществляет выборку канала датчика.
6. Преобразователь (АЦП) - преобразует код, приходящий от коммутатора в цифровой вид.
7. Узел сопряжения – осуществляет передачу цифрового кода в ЭВМ. Является конечным блоком в преобразовании.
Проектируемое в курсовом проекте устройство предназначено для контроля параметров окружающей среды: температуры, влажности, освещенности и давления. Соответственно, на структурной схеме имеются блоки «Датчик температуры», «Датчик влажности», «Датчик освещенности» и «Датчик давления». Далее, полученный сигнал нужно усилить для согласования уровня сигнала, поступающего на вход АЦП, для этой цели служат четыре усилителя.
Т.к. измеряемых параметров несколько, то нужно осуществлять выборку канала от датчика. Для этой цели служит коммутатор, на вход которого поступает также сигнал от счетчика, который и адресует нужный канал.
Выбранный сигнал в аналоговом виде поступает на вход аналого-цифрового преобразователя (АЦП), который преобразует аналоговый сигнал в цифровой. Он также будет временно хранить данные, поступающие от датчика, до передачи этих данных в компьютер.
Уже на этапе составления структурной схемы предполагаем, что для приема данных от устройства будет использован последовательный порт (стык С2). Поэтому на схеме имеется “узел сопряжения”, на вход которого поступают сигнал от датчика в цифровом виде и сигнал от счетчика, адресующий этот сигнал. Уже с этого узла данные поступают в ЭВМ.
Как и большинство цифровых устройств, наша разработка нуждается в синхронизации. Для этой цели введен блок «Генератор». Импульсы с него поступают на счетчик, который координирует работу всех остальных частей системы.
3. ОБОСНОВАНИЕ ВЫБОРА ФУНКЦИОНАЛЬНОЙ СХЕМЫ
Функциональная схема выбирается исходя из задач, которые должна выполнять проектируемая система и исходя из выбранной структурной схемы. Итак, опишем и обоснуем выбор узлов функциональной схемы (см. приложение).
Итак, данная схема устройства состоит из следующих основных блоков:
1. Генератор таковых импульсов – генерирует колебания фиксированной частоты. Фактически это может быть генератор любой конструкции, генерирующий прямоугольные импульсы, но наиболее приемлемым в нашем случае будет использование генератора с кварцевой стабилизацией на логических элементах (например, К561ЛН2), т.к. устройство предъявляет жесткие требования к точности измерений.
2. Делитель частоты используется для получения импульсов переменной частоты в зависимости от делителя на входе. Служит для уменьшения частоты генератора и получает импульсы прямо с него. Реализуется на счетчике и логических элементах. Должен обеспечивать частоту деления 14.
3. Блок управляющей логики, реализованный на счетчиках и логических элементах. Этот блок управляет всей схемой в целом.
4. Блок мультиплексирования. Данный блок реализован на двух мультиплексорах. Формирует последовательность поступления битов информации на интерфейс.
5. Преобразователь, реализованный на прецизионном АЦП К572ПВ4.
Осуществляет преобразование аналогового сигнала в цифровой код и выборку канала от датчика.
6. Датчики – датчики первичной информации (температуры, влажности освещенности и давления).
7. Интерфейс с ЭВМ – осуществляет побитовую передачу данных в ЭВМ. Необходим для преобразования уровней КМДП-логики с уровнями стандарта RS-232C (технические характеристики приведены в следующем разделе).
Выбор RS-232C обусловлен тем, что он позволяет расположить устройство сопряжения (УС) (причем УС любой сложности) на большом расстоянии от компьютера (до 15 метров), что в нашем случае наиболее актуально.
Работает устройство следующим образом.
По функциональному назначению схему можно разделить на 3 блока: блок, включающий АЦП, преобразователь кода и блок преобразования уровня.
Функции первого блока описаны выше (см. назначение «преобразователь».)
Преобразователь кода переводит представление информации в последовательное, осуществляя распознавание начала и конца посылки, синхронизацию приема-передачи битов кадра, слежение за наличием ошибок, информирование о готовности к выполнению операций и т.п. Сюда входят все раннее перечисленные блоки, кроме блоков «преобразователь» и «интерфейс с ЭВМ».
Блок преобразования уровня обеспечивает электрическое согласование уровней сигналов последовательного интерфейса (±12 В), с уровнями устройства сопряжения (КМДП). Сюда входит блок «интерфейс с ЭВМ».
Генератор таковых импульсов генерирует импульсы прямоугольной формы и фиксированной частоты. Импульсы поступают на вход делителя частоты, где делятся на константу (“14”) и поступают на блок управляющей логики.
В составе блока управляющей логики можно выделить три функциональных подблока:
1) Первая подсистема управления реализована на четырехразрядном двоичном счетчике с параллельным выходом и двух логических элементах (2И-НЕ и НЕ). Счетчик считает до восьми и таким образом адресует на блоке мультиплексирования битовую передачу. Логические элементы формируют сигнал конца отсчета, который сбрасывает счетчик, фиксирует адрес и обновляет данные в ОЗУ в АЦП (К572ПВ4).
2) Вторая подсистема управления состоит из счетчика и четырех логических элементах. Она формирует сигнал, который можно использовать для синхронизации внешних устройств и сигнала паузы между передаваемыми байтами, который отключает мультиплексор и выходную шину АЦП.
3) Третий подблок управления состоит из регистра, который хранит код адресуемого канала в АЦП, который, в свою очередь, состоит из двух бит и входит в состав передаваемого байта (старшая часть).
АЦП выбирает канал от датчиков,
адресуемый сигналами с подключенных выходов регистра, и уже раннее выбранный
сигнал преобразует в цифровой код, который поступает на шину и, объединившись с
кодом адреса канала, однозначно кодирует измеряемый в текущий момент параметр.
Т.о. этот преобразователь служит и для временного хранения данных на протяжении
всего времени, пока они не передадутся в ЭВМ. Преобразователь получает со счетчиков
также управляющие сигналы (START, ![]() ),
которые фиксируют адрес на входе, обновляют данные внутри АЦП, отключают
выходные шины и синхронизируют работу АЦП.
),
которые фиксируют адрес на входе, обновляют данные внутри АЦП, отключают
выходные шины и синхронизируют работу АЦП.
Далее цифровой код поступает на блок мультиплексоров, один из которых отвечает за формирование стартового и стопового бита, а другой – за последовательность посылки битов на интерфейс с ЭВМ.
4. ОБОСНОВАНИЕ ВЫБОРА ПРИНЦИПИАЛЬНОЙ СХЕМЫ
Выбор принципиальной схемы (см. приложение) обусловлен выбранной функциональной схемой и алгоритмом работы устройства. Ниже, при описании работы устройства, обоснуем выбор некоторых узлов принципиальной схемы.
Принципиальная схема определяет полный состав элементов и связи между ними и дает детальное представление о принципах работы устройства.
Большинство интегральных микросхем выполнено на КМДП-транзисторах. И это не случайно.
В качестве эксплуатационных характеристик КМДП ИС, свойственных только им, следует назвать: работоспособность в широком диапазоне питающих напряжений (3…15 В), высокую помехозащищенность, достигающую 30…45 % от значения питающего напряжения, высокую нагрузочную способность, составляющую до 1000 входов таких же ИС на частотах до нескольких килогерц, высокое входное сопротивление (~1012 Ом), упрощенное сопряжение по слаботочным источникам входного напряжения. Кроме того, имеются и существенные преимущества в технологии КМДП ИС по сравнению с биполярными ИС, к наиболее важным из которых относятся: меньшее (почти в три раза) число технологических операций; самоизоляция от других элементов, расположенных на одной подложке; более высокая степень интеграции (30%) на кристалле.
Исключительно малая потребляемая мощность, открывает для КМДП ИС широкую перспективу применения, в первую очередь в устройствах с автономным питанием: различных бортовых устройствах, в автономных устройствах сбора и обработки данных и т.д., т.е. там, где энергетический фактор оказывается решающим при выборе элементной базы и где по существу им нет альтернативы.
На КМДП-логике у нас построены все логические элементы, счетчики, регистр и мультиплексоры.
Построение систем сбора и цифровой обработки аналоговых сигналов на современных БИС ЦАП, АЦП и микропроцессорных наборах обеспечивает создание функционально полных устройств с точностью, соответствующей 10-12 разрядам, и временем преобразования на канал 1…2 мкс. Причем эти устройства конструктивно всегда размещаются на одной-двух платах. Значительно упростить построение системы сбора может СБИС однокристальной аналогово-цифровой системы типа К572ПВ4. В нашей схеме эта СБИС выполняет мультиплексирование аналогового сигнала и преобразование его в цифровой код.
Задающий генератор выполнен на элементах DD1.1 и DD1.2. Тактовая частота 32767 Гц выбрана из соображений доступности часовых кварцевых резонаторов. Счетчик DD5.1 с элементами DD4.2, DD1.3 образуют делитель тактовой частоты с коэффициентом деления 14. Получающаяся при этом скорость передачи данных — примерно 2341 Бод — отличается от стандартной 2400 Бод менее чем на 3%, что вполне допустимо для асинхронного режима работы. Счетчик DD5.2 формирует последовательность передаваемых 10 бит: стартовый бит, 8 бит данных, 1 стоповый бит без бита паритета.
До начала описания будет полезным упомянуть о технических параметрах примененного в курсовом проекте стандарта RS-232C:
Стандарт RS-232C введен в 1962 году и в настоящее время широко применяется в промышленности. Этот стандарт был разработан для несимметричной передачи данных на короткие расстояния с низкой скоростью.
· Требования стандарта к передатчику:
1) Выход должен выдержать режим холостого хода или короткого замыкания на землю силового или какого либо другого проводника.
2) R при вкл. питании 300 Ом.
3) Uxx мак =+/-25B.
4) Iмак вх кз=500мА.
5) Абсолютное значение сигнала на выходе передатчика на нагрузке от 3000 до 7000 Ом,должна быть более 5В ,но не более 15В.
6) Время наростания и спада сигнала в пределах переходной зоны между +3 и -3В не должно превышать 1мкс.
7) Скорость спада выходного сигнала не должна превышать 30В/мкс.
8) Максимальная скорость передачи данных 20000 бод.
· Требования стандарта к приемнику:
1) Rвх=3000 % 7000 Ом.
2) Шунтирующая Смак между входом приемника и соединительным кабелем должна быть менее 2500 пФ.
3) Uвх хх < 2.0B.
4) Максимальная скорость приема данных 20Кбод.
5) Пределы Uвх +/-25В.
Для того чтобы облегчить соединение оборудования, в котором используется стандарт RS-232, был стандартизирован и 25 контактный соединитель для интерфейса по стандарту RS- 232C (см. таблицу 4.1.)
Таблица 4.1.Обозначение контактов соединителя для стандарта RS-232C.
| 9-контактный соединитель, номер контакта | Обозначение | Описание |
| 1 | DCD | Детектор принимаемого с линии сигнала |
| 2 | RxD | Принимаемые данные |
| 3 | TxD | Передаваемые данные |
| 4 | DTR | Готовность выходных данных |
| 5 | GND | Сигнальное заземление |
| 6 | DSR | Готовность приема данных |
| 7 | RTS | Запрос передачи |
| 8 | CIS | Сброс передачи |
| 9 | RI | Индикатор вызова |
Рассмотрим процесс передачи байта.
В исходном состоянии (пауза) работа DD8 запрещена высоким уровнем на выходах элемента DD3.2, транзистор VT1 открыт, и в линии связи (вывод 2 ХS1) устанавливается отрицательное напряжение, соответствующее уровню логической “1”.
После сброса DD5.2 на его выходах устанавливаются низкие уровни. Hа базу VT1 через выходы Х0 мультиплексора DD7 и Y0 мультиплексора DD8 подается низкий уровень, VT1 закрывается, и в линии уславливается положительное напряжение — формируется стартовый бит. Далее изменением кода на выходах Q0…Q2 счетчика DD5.2 последовательно переключаются каналы X1...Х7 мультиплексора DD8 — в линию передаются биты данных DB0...DB5 микросхемы DD9 и с выхода “1” регистра DD9.2. По окончании передачи бита “1” регистра DD9.2 выход Q3 счетчика DD5.2 устанавливается в "1", a Q0...Q2 — в "0". На выход через каналы X1 мультиплексора DD7 и Х0 мультиплексора DD8 подается бит “1” регистра DD9.1, который вместе с битом “1” регистра DD9.2 играет роль идентификатора передаваемого байта. По окончании передачи бита “1” регистра DD9.1 счетчик D5.2 сбрасывается и одновременно происходит переключение DD6.1 — на его выходе Q0 устанавливается низкий уровень, а на выходе DD3.2 — высокий, запрещающий работу в DD8 и отключающий выходы в DD9. В линии формируется стоповый бит и его уровень удерживается в течение интервала времени, равного длительности посылки 9*3 бит(3 т.к. 3 стоповых бита). В течении этого времени устанавливается в состояние логического "1" вход ALE АЦП К572ПВ4, что позволяет зафиксировать адрес необходимого канала в регистре К561ИР2 (DD9) и на входах A0,A1 во внутреннем ОЗУ АЦП.
По окончании паузы процесс передачи данных повторятся аналогичным образом для следующего байта. Отличие состоит в том, что для следующего байта будут другие 0-ой и 1-ый биты. За это отвечает регистр DD9, хранящий четыре комбинации ( 0-00, 1-01, 2- 10, 3-11 ). Это позволяет однозначно идентифицировать все четыре канала от датчиков. Таким образом, процесс передачи данных происходит следующим образом:
Пауза0 – пауза1 – пауза2 – передаваемый байт – пауза0 –…
Общая пауза между принятыми байтами (примерно 4 мс) позволяет произвести их сортировку и заполнение массива данных а ОЗУ компьютера, а также обновить их в локальном ОЗУ DD9.
0птрон V01 преобразует уровни КМДП и уровни RS-232 и одновременно осуществляет гальваническую развязку линии связи. Это — простое, но эффективное средство защиты компьютера, поскольку ни обычные мультиплаты IBM PC, ни платы адаптеров интерфейсов ЕС-1841 полной гальванической развязки не имеют. В крайнем случае, можно обойтись без оптрона, изменив схему выходного каскада.
Линия связи питается от отдельного биполярного источника питания +12В, -12В. Поскольку ток, потребляемый линией связи невелик, в качестве источника питания может использоваться, например, преобразователь напряжения на основе блокинг-генератора.
5. ОПИСАНИЕ ЭЛЕМЕНТОВ СХЕМЫ
В состав КМДП серий ИС включены счетчики импульсов, которые относятся к микросхемам средней интеграции. Основное функциональное назначение этих типов ИС – счет импульсов и деление частот. Счетчики импульсов КМДП-серий можно разделить на две условные группы: специализированные счетчики и универсальные счетчики общего назначения. Основные параметры счетчиков импульсов приведены в таблице 5.1.
Таблица 5.1. Основные параметры счетчиков
| Тип микросхемы |
Разрядность |
Напряжение питания Uип, В |
Ток потребления Iпот, мкА |
Потребляемая мощность Рпот, мВт |
| К176ИЕ1 | 6 | 9 | 20 | 0.18 |
| К561ИЕ8 | 10 | 10 | 20 | 0.2 |
| К561ИЕ10 | 4 | 10 | 100 | 1 |
| К561ИЕ16 | 14 | 10 | 20 | 0.2 |
| К561ИЕ9 | 8 | 10 | 100 | 1 |
В таблице 5.1. приведены основные параметры счетчиков. Микросхема К176ИЕ1 является простейшим шестиразрядным асинхронным двоичным счетчиком импульсов. Она имеет шесть выходов, на которых содержимое счетчика выдается двоичным числом.
Микросхема К561ИЕ8 представляет собой счетчик по модулю 10 с дешифратором. Она выполнена на основе пятикаскадного высокоскоростного счетчика Джонсона и дешифратора, преобразующего двоичный код в сигнал на одном из десяти выводов.
Микросхема К561ИЕ9 является счетчиком по модулю 8 с дешифрацией состояний. Принцип работы ее аналогичен счетчикам ИЕ8, но она содержит 4 триггера в счетчике Джонсона. Следует отметить, что время задержки распространения сигнала от входа до информационных выходов и до выхода переноса у данного типа счетчиков различно. Для К561ИЕ9 при Uип = 5В tзд.р для выходов Q1…Q7 составляет 3150 нс, а для вывода Р—1500 нс. Для микросхемы К564ИЕ9 время задержки нормируется при Uип = 10 В и составляет для выходов Q1…Q7 ---700 нс, а для выхода Р – 360 нс. Основное применение счетчиков типа ИЕ9 и ИЕ8 – различные распределители уровней и импульсов, используемых в качестве формирователей управляющих сигналов либо серий синхроимпульсов.
Микросхема К561ИЕ10 содержит два независимых 4-разрядных двоичных счетчика с параллельным выходом. Для повышения быстродействия в ИС применен параллельный перенос во все разряды. Подача счетных импульсов может производиться либо в положительной полярности, либо в отрицательной полярности на разные входы микросхемы.
Микросхема К561ИЕ16 содержит четырнадцатиразрядный асинхронный счетчик с последовательным переносом. Сброс счетчика в нуль осуществляется импульсом положительной полярности не менее 500 нс по входу R. Максимальная частота выходных импульсов при Uип = 10 В достигает 4 мГц.
Учитывая характеристики, приведенные в таблице, а так же описание микросхем приведенное выше, для выполнения курсового проекта выберем следующие микросхемы счетчика: 2 микросхемы 561ИЕ10.
Кроме счетчиков в курсовом проекте использованы сдвигающие регистры К561ИР2. Выбор их обусловлен простотой внутренней структуры, функционированием и необходимой раздядностью.
С помощью МДП-транзисторов легко получить электронные контакты, в которых цепь сигнала гальванически не связана с источником управляющего воздействия. Ключи и коммутаторы на КМДП-транзисторах обладают двухсторонним действием, т.е. сигналы могут передаваться как от входа к выходу, так и в обратном направлении. Коммутаторы могут иметь много входов и один выход или быть дифференциальными. Коммутаторы на основе КМДП ИС могут использоваться как для цифровых, так и аналоговых сигналов. В цифровых устройствах эти коммутаторы называются цифровыми мультиплексорами (с нескольких входов на один выход) или демультиплексорами (с одного входа на несколько выходов). Ввиду двухстороннего действия КМДП-ключей коммутаторы могут выполнять обе функции. Основные параметры мультиплексоров приведены в таблице 5.2.
Таблица 5.2. Основные параметры мультиплексоров
|
Тип микро схемы |
Разрядность адреса |
Напряжение питания Uип , В |
Ток потребления Iпот, мА |
Потребляемая мощность Рпот , мВт |
| К561КП1 | 2 | 10 | 20 | 0.2 |
| К651КП2 | 3 | 10 | 100 | 1 |
| К561КП3 | 3 | 10 | 40 | 0.4 |
В таблице 5.2. приведены основные параметры мультиплексоров серии 561. Микросхема К561КП1 содержит два четырехканальных коммутатора, которые переключаются синхронно. Внутреннее сопротивление включенного канала при Uип = 5 В находится в пределах 0.5 – 2.5 кОм. Оно существенно снижается при Uип = 15 В и достигает величин 0.13 – 0.28 кОм. Время переключения коммутаторов при поступлении сигнала разрешения составляет 600 нс. При смене адреса канала коммутаторы переключаются за 400 нс. Задержка коммутируемого сигнала через открытый канал не превышает 40 нс. Микросхема К561КП2 содержит один восьмиканальный коммутатор. Отличие микросхем КП2 и КП1 состоит в трехразрядном адресе канала и одном выходе при восьми входах. Время переключения коммутаторов при поступлении сигнала разрешения составляет 400 нс, при смене адреса канала – 320 нс, а задержка сигнала через открытый канал не превышает 30 нс.
Учитывая описание микросхем и характеристики, приведенные в таблице, для курсового проекта можно выбрать две микросхемы К561КП2. Эти микросхемы будем использовать для преобразования параллельного кода в последовательный с одновременной подачей сигналов в последовательный порт. В серии К561 только эта микросхема обладает нужными параметрами (8 входов – 1 выход).
Элементы микросхемы К561ЛН2 (элементы НЕ) используются в основном для организации мультивибраторов. В серии К561 имеется еще одна микросхема, содержащая инверторы, однако в ней много лишнего.
Единственный в схеме транзистор (КТ315Б) выбран также не случайно. Такие транзисторы найдутся на любом производстве, стоят они недорого, но в то же время обладают необходимыми характеристиками.
Несколько дополнительных слов можно сказать о кварцевом резонаторе ZQ1. Он выбран тоже в основном из соображений доступности: кварцевые резонаторы, рассчитанные на частоту 32768 Гц, широко применяются в промышленности при изготовлении электронных часов. Кроме этого, ZQ1 обладает невысокой резонансной частотой (32768 Гц), что позволяет применить делитель на не слишком большое число. При этом мы можем получить частоту, соответствующую скорости передачи 32768/14 = 2341 бод, что отличается от ближайшей скорости передачи COM-порта (115200/48 = 2400 бод) всего лишь на 3%. Такой разброс вполне допустим при асинхронном способе связи.
Микросхема К561КП2
Микросхемы представляют собой восьмиканальный мультиплексор. Содержат 188 интегральных элементов. Назначение выводов: 1 — выход/вход канала Х4; 2 — выход/вход канала Х6; 3 —выход/вход Y; 4 — выход/вход канала Х7; 5 — выход/вход канала Х5; 6—вход запрета D; 7 — напряжение смещения; 8 — общий; 9 — вход управления С; 10— вход управления В; 11—вход управления А; 12 — выход/вход канала ХЗ; 13 — выход/вход канала Х0; 14 — выход/вход канала X1; 15 — выход/вход канала Х2; 16 —напряжение питания.
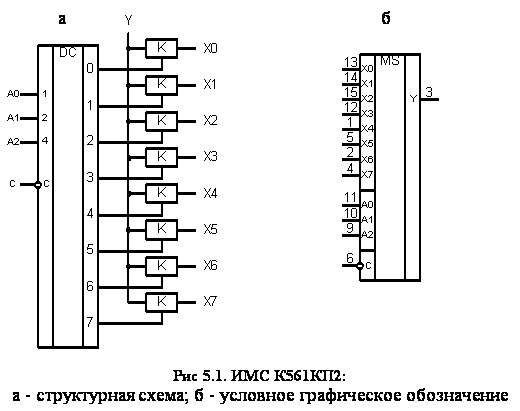
Таблица 5.3. Таблица истинности микросхемы К561КП2
| Выходной сигнал | ||||
| C | A3 | A2 | A1 | |
| 0 | 0 | 0 | 0 | YXO |
| 0 | 0 | 0 | 1 |
YX1 |
| 0 | 0 | 1 | 0 | YX2 |
| 0 | 0 | 1 | 1 | YX3 |
| 0 | 1 | 0 | 0 | YX4 |
| 0 | 1 | 0 | 1 | YX5 |
| 0 | 1 | 1 | 0 | YX6 |
| 0 | 1 | 1 | 1 | YX7 |
| 1 | X | X | X | Все закрыты |
Микросхема К561ИЕ10
Содержит два независимых 4-разрядных двоичных счетчика с параллельным выходом. Для повышения быстродействия в ИС применен параллельный перенос во все разряды. Подача счетных импульсов может производиться либо в положительной полярности (высоким уровнем) на вход С, либо отрицательной полярности (низким уровнем) на вход V. В первом случае разрешение счета устанавливается высоким уровнем на входе V, а во втором случае – низким уровнем на входе С.
Структурная схема и условное обозначение счетчиков 561ИЕ10 приведены на рис. 5.2.
При построении многоразрядных счетчиков с числом разрядов более четырех соединение между собой ИС ИЕ10 может производиться с последовательным или параллельным формированием переноса. В первом случае на вход С (вывод 1 или 9) следующего каскада счетчика подается высокий уровень с выхода Q4 (выводы 6 или 14) предыдущего каскада.
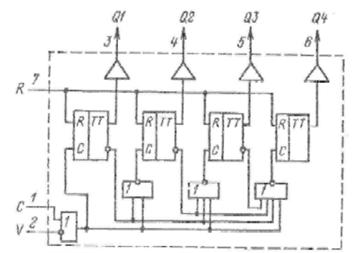
Рис 5.2. ИМС К561КП2:
а- структурная схема; б - условное графическое обозначение
Микросхема К561ЛА9
Микросхема представляет собой 3 элемента 3И-НЕ. Назначение выводов: 1, 2, 3, 4, 5, 8, 11, 12, 13—входы; 6, 9, 10 - выходы; 7 — общий; 14 — напряжение питания.
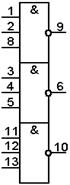
Рис 5.3. Условное обозначение ИМС К561ЛА9
Микросхема К561ЛА7

Рис 5.4. Условное обозначение ИМС К561ЛА7
Микросхема представляет собой 4 элемента 2И-НЕ. Назначение выводов: 1, 2, 5, 6, 8, 9, 12, 13—входы; 3, 4, 10, 11 — выходы; 7 — общий; 14 — напряжение питания.
Микросхема К572ПВ4
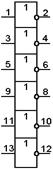
Рис 5.5. Условное обозначение ИМС К561ЛН2
Микросхема представляет собой 6 буферных инверторов (элементов НЕ). Назначение выводов: 1, 3, 5, 9, 11, 13—входы; 2, 4, 6, 8, 10, 12 — выходы; 7 — общий; 14 — напряжение питания.
Значительно упростить построение системы сбора может СБИС однокристальной аналогово-цифровой системы типа К572ПВ4.
 Структурная схема однокристальной системы сбора и преобразования
аналоговых сигналов К572ПВ4 представлена на рисунке 5.6.
Структурная схема однокристальной системы сбора и преобразования
аналоговых сигналов К572ПВ4 представлена на рисунке 5.6.
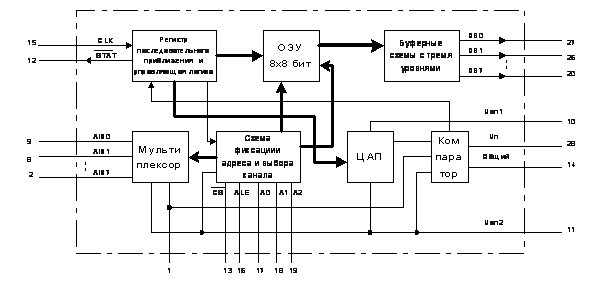
Рис.5.6. Структурная схема ИС К572ПВ4
Аналоговые сигналы с помощью восьмиканального мультиплексора поочередно подключаются к инвертирующему входу компаратора. Блок фиксации адреса канала через каждые 80 тактовых импульсов присоединяет очередной канал. Компаратор, ЦАП и РПП образуют восьмиразрядный АЦП последовательного приближения.
Результат преобразования аналогового
сигнала в 8-разрядный код автоматически записывается в соответствующие столбцы
оперативного запоминающего устройства (03У). Работа БИС синхронизирована
тактовыми импульсами CLK. РПП содержит управляющую логику, формирующую сигналы
управления другими узлами. Сигнал STAT содержит импульсы, формируемые в моменты
начала преобразования каждого канала. По сигналу ![]()
![]() данные, поступающие из
памяти на вход буферных каскадов, появляются на выходах DBO—DB7. В зависимости
от кода на выводах А0, А1, А2 производится выбор требуемого из аналоговых
сигналов AIN0-AIN7. Разрешение на считывание кода AIN0-AIN7 также дает сигнал
данные, поступающие из
памяти на вход буферных каскадов, появляются на выходах DBO—DB7. В зависимости
от кода на выводах А0, А1, А2 производится выбор требуемого из аналоговых
сигналов AIN0-AIN7. Разрешение на считывание кода AIN0-AIN7 также дает сигнал ![]() . Однако адрес будет
зафиксирован в дешифраторе только при подаче сигнала ALE. Каждая ячейка ОЗУ
содержит D-триггер и схему считывания, обеспечивающую произвольный ввод и вывод
данных в разные столбцы под управлением блока фиксации адреса и выбора канала. Выходные
буферные каскады построены на логических схемах с тремя состояниями (лог. 0,
лог. 1 и “обрыв цепи”). Это позволяет отключить систему от шины данных, когда
не требуется выдача результата преобразования или в промежутках между циклами
преобразования аналоговых сигналов сигналов, поступающих на коммутатора. Такая
организация системы обеспечивает доступ к ОЗУ, т. е. к результату
преобразования по любому каналу в любое время. Благодаря этому сокращаются
затраты на считывание результатов преобразования.
. Однако адрес будет
зафиксирован в дешифраторе только при подаче сигнала ALE. Каждая ячейка ОЗУ
содержит D-триггер и схему считывания, обеспечивающую произвольный ввод и вывод
данных в разные столбцы под управлением блока фиксации адреса и выбора канала. Выходные
буферные каскады построены на логических схемах с тремя состояниями (лог. 0,
лог. 1 и “обрыв цепи”). Это позволяет отключить систему от шины данных, когда
не требуется выдача результата преобразования или в промежутках между циклами
преобразования аналоговых сигналов сигналов, поступающих на коммутатора. Такая
организация системы обеспечивает доступ к ОЗУ, т. е. к результату
преобразования по любому каналу в любое время. Благодаря этому сокращаются
затраты на считывание результатов преобразования.
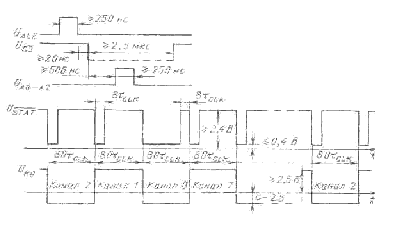
Рис. 5.7. Временные диаграммы работы БИС К572ПВ4
Из показанных на рис. 5.7 временных
диаграмм видно, что считывание данных из памяти происходит только при наличии
соответствующего адреса А0-А2 и воздействии сигнала ![]() .
Процесс же преобразования производится непрерывно и последовательно по каждому
каналу, пока тактовые импульсы подаются на вывод CLK. Данные, полученные в
процессе преобразования, автоматически передаются в ОЗУ. При этом формируется
сигнал
.
Процесс же преобразования производится непрерывно и последовательно по каждому
каналу, пока тактовые импульсы подаются на вывод CLK. Данные, полученные в
процессе преобразования, автоматически передаются в ОЗУ. При этом формируется
сигнал ![]() , срез которого показывает,
что преобразование закончилось, и данные записываются в ОЗУ. Сигнал
, срез которого показывает,
что преобразование закончилось, и данные записываются в ОЗУ. Сигнал ![]() исключает считывание из
ОЗУ недостоверных данных. Этот сигнал позволяет выявить канал 0, при
о6служивании которого напряжение соответствует напряжению лог. 0 в течение 64
периодов тактовых импульсов в отличие от остальных каналов.
исключает считывание из
ОЗУ недостоверных данных. Этот сигнал позволяет выявить канал 0, при
о6служивании которого напряжение соответствует напряжению лог. 0 в течение 64
периодов тактовых импульсов в отличие от остальных каналов.
После включения напряжения питания устанавливается произвольный канал преобразуемого аналогового сигнала. Поэтому в наихудшем случае потребуется 800 тактов для получения первой достоверной информации по всем каналам. Основные параметры БИС K572ПB4 приведены в таблице 5.4. Полярность и диапазон изменения преобразуемых аналоговых сигналов определяются полярностью и значениями эталонных напряжений Uоп1 и Uоп2.
Таблица 5.4. Таблица параметров микросхемы К562ПВ42
| Параметр | Значение |
| Разрядность N, бит | 8 |
|
Время преобразования Тп, мкс |
100 |
|
Погрешность коэффициента передачи dk, % |
0,4 |
|
Напряжение смещения нуля Uсм, % |
1,25 |
|
Потребляемый ток Iп1/Iп2, мА |
3 |
|
Напряжение питания Uп1, Uп2, В |
5 |
|
Опорное напряжение Uоп, В |
±2,5В |
| Логические выходные сигналы | КМОП |
| Тип корпуса | 2121.28-7 |
Микросхема К561ИР2
Микросхема содержит по два независимых четырехразрядных регистра сдвига. Регистры выполнены на однотактных D-триггерах. Данные в регистр вводятся последовательно, через вход D. Информация в регистре сдвигается на один разряд по каждому фронту (положительному перепаду) синхроимпульсов на входе С. Сброс регистра в нуль осуществляется подачей положительного импульса (высокого уровня) на асинхронный вход R.
Назначение выводов:
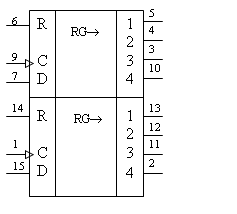 6,14 – сброс; 9,1 –
тактирование;
6,14 – сброс; 9,1 –
тактирование;
7,15 – данные; 5,13 – 0-ой разряд;
4,12 – 1-ый разряд;3,11- 2-ой разряд;
10,2 – 3-ий разряд; 8 – общий;
16 - +Uип.
Рис 5.8. ИМС К561КП2:
Условное графическое обозначение.
· Используемые датчики.
Ниже приведем основные сведения о выбранных датчиках.
Перспективными для целей электрического измерения и контроля различных, в том числе неэлектрических, величин принято считать полупроводниковые измерительные преобразователи (ИП). Их действие основано на целом наборе физических эффектов в твердом теле, заключающихся в изменении проводимости или возникновения ЭДС при воздействии на чувствительный элемент температуры, давления, электрических и магнитных полей, полей излучений, составляющих газовых сред, влажности и т.д.
Преобразователь, преобразующий физическую величину в электрический сигнал, принято называть чувствительным элементом. Статическая чувствительность датчика выражает функциональную зависимость выходной величины В датчика от естественной измеряемой величины А и определяется:
![]()
Это соотношение является постоянным, когда выходная величина (выходной сигнал) представляет собой линейную функцию входной величины (входного сигнала). Если имеется нелинейная функция, то должны быть указаны точки, к которым относиться данная чувствительность.
1. Датчик температуры.
Одним из вариантов датчика может быть датчик, на основе термотранзистора MTS105 фирмы Motorolla. При фиксированном токе коллектора напряжение база – эмиттер транзистора линейным образом зависит от температуры. Эта зависимость имеет линейный вид и представлена на рис. 5.8.
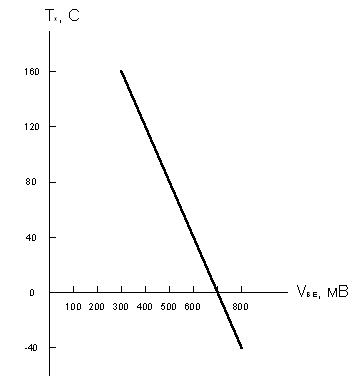
Рис. 6.8. Температурная зависимость напряжения база- эмиттер для транзистора MTS105 фирмы Motorolla.
Сам термометр с использованием в качестве датчика транзистора MTS105 представлен на рис. 5.9.
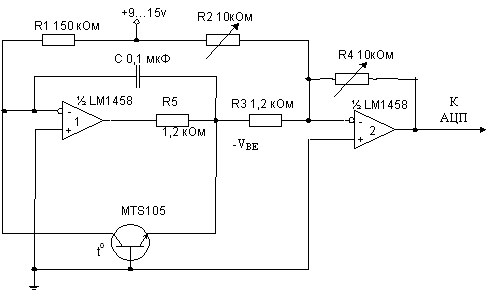
Рис. 5.9. Датчик температуры на базе MTS105
Резистор R1 определяет коллекторный ток транзисторного датчика. Этот резистор должен обладать высокой стабильностью и низким температурным коэффициентом сопротивления (например, металлопленочный резистор).
Получаем величину постоянного коллекторного тока:
Ik = Uп / R1 = 15В / 150кОм = 0,1 мА
Операционные усилители ОУ1 и ОУ2 должны иметь малый дрейф. На выходе ОУ1 будет действовать напряжение -VBE. Это напряжение усиливается ОУ2. С помощью потенциометра R4 регулируется коэффициент усиления этого ОУ для поддержания выходного сигнала в пределах границ насыщения.
Получаем коэффициент усиления:
KОУ2 = Rос / Rвх = R4 / R3 = 10 кОм / 1,2 кОм
Потенциометр R2 позволяет откалибровать выходной сигнал к v0=0 при T=0 0C. Если же калибровка осуществляется программно, то этот потенциометр не нужен. Элементы R5 и С предотвращают самовозбуждение схемы. Напряжение питания +15В должно быть очень стабильным.
Для калибровки транзисторный датчик погружается в ледяную ванну, и с помощью потенциометра R2 устанавливается напряжение
v0=0, что соответствует индикации температуры в градусах Цельсия. Точность этого термометра ±0,010C в интервале температур от –50 до +1250C. Потенциометр R4 – регулятор усиления схемы (величины выходного напряжения). Калибровка в тройной точке воды и использование прецизионной схемы обеспечивают точность ±0,010C с учетом нелинейности и долговременной нестабильности.
Вторым вариантом датчика температуры может быть датчик построенный на терморезисторах (ТР), элементах у которых электрическое сопротивление меняется при изменении температуры. В зависимости от того, возрастает или понижается сопротивление датчика при повышении температуры, различают полупроводниковые датчики соответственно с положительным и отрицательным температурным коэффициентом сопротивления ТКС. Металлические датчики температуры из никеля или платины всегда обладают положительным ТКС.
Величина сопротивления ТР с отрицательным ТКС в рабочем диапазоне температур изменяется в зависимости от температуры по экспоненциальному закону:
R=Aeв/т
где А, В-постоянные; Т-абсолютная температура, К.
Для практических расчетов величины сопротивления ТР при различных температурах окружающей среды можно пользоваться формулой:
![]()
где RT2 и RT1 - сопротивления ТР при температурах Т2 и Т1 соответственно.
Величину постоянной В определяет экспериментально измерением сопротивления R при температурах Т2 и Т1. При этом используют зависимость:
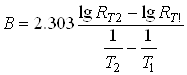
При измерениях RT2 и RT1 терморезистор необходимо помещать в ультратермостат. Температуры Т2 и Т1 должны поддерживаться и измеряться с точностью не ниже 0.05 °С .
Температурный коэффициент сопротивления ТР в рабочем диапазоне температур изменяется по зависимости:
![]()
Для точного измерения температуры в диапазоне от –200 °С до +85 °С чаще всего применяются датчики температуры из никеля и платины. Электрическое сопротивление металлических проводников изменяется согласно уравнению:
![]()
где R0 –сопротивление при 0 °С (273 К),
R1 - сопротивление при T1,
a - температурный коэффициент равный для Pt 3.9*10-3 K-1 и Ni 5.39*10-3 K-1.
Сопротивление при 0 °С в большинстве случаев выбирается равным 100 Ом. В таких случаях ТР обозначают Pt-100 или Ni-100.
Высокое электрическое сопротивление ТР позволяет пренебрегать сопротивлением подводящих проводов, контактным сопротивлением и ЭДС, что дает возможность измерять температуру на расстоянии в несколько км от точки измерения. Во всех случаях использования ТР для измерения температуры необходимо ограничить ток, проходящий через чувствительный элемент, чтобы не допустить изменения его сопротивления из-за самонагревания.
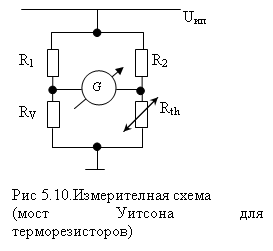
ТР включают в основном в мостовые схемы, простейшей разновидностью которой является измерительный мост (или мост Уитсона) (см. рис 5.10).
|
|
В случае измерения напряжения оно получается равным
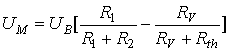
При этом нужно использовать высокоомный вольтметр, так как между точками 1 и 2 не должен протекать ток. Если применяется низкоомный амперметр, то между точками 1 и 2 возникает ток короткого замыкания, определяемый выражением
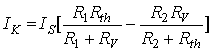
где IS - ток питания.
Практически применимая схема показана на рис.5.11.
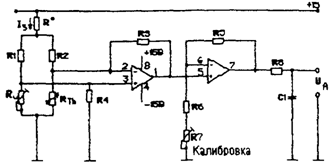
Рис.5.11. Принципиальная схема прибора для измерения температуры
Измерительный ток IS должен быть очень мал. чтобы не вызывать нагревание резистора Rth, которое может привести к ошибкам измерения. Эта так называемая погрешность самонагрева зависит от подводимой электрической мощности (Р =I2R), величины отводимого тепла и приборной постоянной ЕК, называемой коэффициентом самонагрева. Обусловленное самонагревом повышение температуры можно рассчитать по формуле
![]()
где Т1 и Т2 - значение температуры при наличии и отсутствии измерительного тока IS , Р - подводимая к измерительному сопротивлению мощность (в милливаттах), ЕК - коэффициент самонагрева (м Вт/°С).
Обычно величину ЕК как характеристику датчика указывают для измерений в воде и воздухе.
Пример:
При измерении температуры воздуха датчиком типа W60/24 применена схема рис. 5.11.
При 0°С имеем R1 = R2 = RV= Rth=100 Ом.
Коэффициент ЕК для Pt - 100 (W60/24) равен 4 мВт / °С. При необходимости измерения с погрешностью не более 0.25°С через датчик должен протекать измерительный ток, равный лишь
![]() .
.
Следовательно, ток IS должен быть равен 6 мА. а соответствующее ему добавочное сопротивление
![]()
Сигналы измерительного моста с помощью мостикового усилителя тока преобразуются в напряжение. При этом сопротивления R3 и R4 должны быть выполнены в виде 0.1 %-ных металлопленочных резисторов. В зависимости от типа датчика R3 и R4 находятся в диапазоне от 1 до 50 кОм. Калибровка измерительной схемы осуществляется с помощью потенциометра R7 во втором, неинвертирующем каскаде усилителя. Коэффициент усиления этого каскада определяется сопротивлениями R5, R6, R7. При R5 = R7 = 1 МОм и R6 = 100 кОм измерительный сигнал можно усилить еще примерно в десять раз. Резистор R8, и конденсатор С1 формируют RC - цепочку для фильтрации и демпфирования сигнала. Типичными параметрами являются R8 = 10 кОм и С1 = 4.7 мкФ.
Настройка схемы осуществляется следующим образом.
1. Определить R* по заданному ЕК.
2. Впаять R* и проверить IS путем измерения падения напряжения на R*.
3. Погрузить датчик температуры Rth в ванну с тающим льдом.
4. Регулирующим потенциометром RV установить напряжение на нуль.
5. Датчик температуры Rth погрузить в ванну с кипящей водой.
6. Регулирующим потенциометром R7 установить выходное напряжение на 1В.
Если чувствительность недостаточна, то сопротивление R3, R4 следует увеличить. При слишком высокой чувствительности эти сопротивления следует уменьшить. В качестве Rth можно применять любые, выпускаемые промышленностью, терморезисторы типа Rt-100.
2. Датчик влажности
При описании влажности воздуха следует различать следующие понятия.
Абсолютная влажность Fabs – показывает, какое количество воды содержиться в 1 м3 воздуха:
Fabs=масса воды/объем воздуха[г/м3]
Влажность насыщения Fsal – характеризует такое количество воды, которое может содержаться в 1 м3 воздуха при определенной температуре и атмосферном давлении без образования конденсата:
Fsal(T)=макс к-во воды/объем воздуха[г/м3]
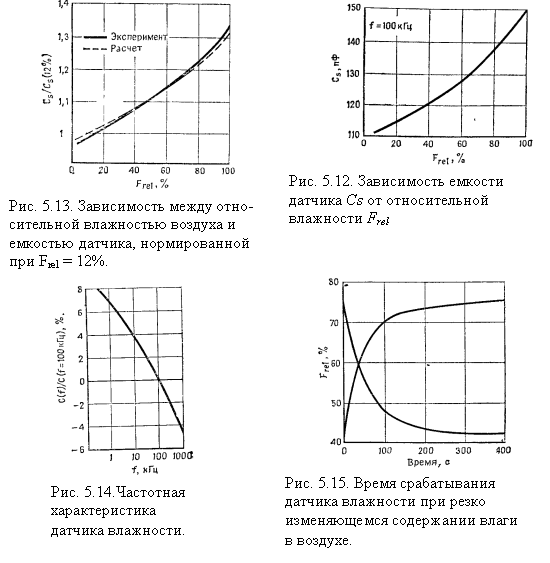
Относительная влажность Frel(T) – представляет собой выраженное в % отношение абсолютной влажности влажности насыщения. По этой причине влажность также зависит от температуры:
В данном курсовом проекте я предложил использование емкостных датчиков влажности. Они характеризуются простотой в обращении, а также относительной дешевизной. Эти датчики состоят из специальной пленки с запыленным с двух сторон слоем золота (фирма Valvo). Т.о. пленка служит диэлектриком плоского конденсатора. С помощью измерительной схемы, изменение емкости можно преобразовать в постоянное напряжение.
Некоторые технические характеристики датчика влажности фирмы Valvo приведены в таблице 5.5.
Таблица 5.5.
|
Емкость (J= 25 оС, Frel = 43%, f=100 кГц), пкФ |
122 (± 15%) |
|
Чувствительность (Frel = 43 %), пФ/% |
0,4±0,05 |
| Диапазон измеряемой влажности, % | 10 … 90 |
|
Диапазон рабочих температур, оС |
0 … 60 |
| Максимальное рабочее напряжение(постоянное и переменное), В | 15 |
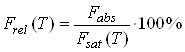
Зависимость С датчика от влажности воздуха (Frel) приведена на рис.5.12. Т.к. эта характеристика изогнута (нелинейна), непосредственную индикацию можно осуществлять только при соответствующим образом откалиброванной шкале или с помощью дополнительно включенной схемы линеризации.
Общая емкость датчика равна
![]()
где Со—емкость при нулевой влажности, DC—изменение емкости из-за наличия влаги. Емкость датчика CS слабо зависит от измерительной частоы, как видно из рис. 5.14. Потому незначительное изменение измерительной частоты не оказывает влияние на показания датчика.
Важной характеристикой, определяющей применимость датчика, является его время срабатывания или постоянная времени. При резком изменении влажности датчику требуется около 2 мин для достижения 90% окончательного показания (рис. 5.15), соответствующего вновь установившейся влажности.
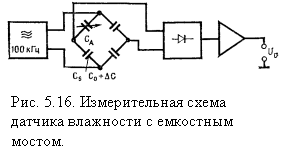
Изменения емкости можно, естественно, как и изменения сопротивления, измерять с помощью измерительного моста. Соответствующая схема показана на рис. 5.16. Она состоит из моста для измерения емкости с датчиком влажности в качестве активного элемента. Мост питается переменным напряжением с частотой около 100 кГц. С помощью построечного конденсатора С0 выходное напряжение U0 устанавливается на нуль при = 0. При изменении емкости DC выходное напряжение Uo служит мерой этого изменения и соответственно изменения влажности.
3. Датчик освещенности
Датчик освещенности построен на фототранзисторе.
Принцип работы фототранзистора основан на усилении генерируемого фототока в B раз (B – коэффициент усиления тока базы) для получения большего тока коллектора. Некоторая нелинейность усиления фототока объясняется зависимостью B от тока коллектора; кроме того, как и во всех транзисторах, темновой ток зависит от температуры. В последнее время в результате большого прогресса в технологии фотодиодов фототранзисторы отошли на второй план, но тем не менее они по-прежнему используются благодаря своему важному преимуществу – наличию внутреннего усиления.
На рис. 5.17 показана принципиальная схема простого измерителя освещенности на фототранзисторе.
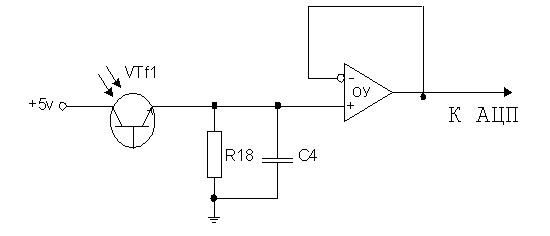
Рис. 5.17. Датчик освещенности на базе MT2 7935.
Схема питается от источника с напряжением 5 В, установку подходящей точки обеспечивает резистор с сопротивлением 10 кОм. Выбор напряжения источника питания (5 В вместо 15 В) обусловлен необходимостью поддержания выходного напряжения ОУ в пределах рабочего диапазона аналогово-цифрового преобразователя. Сопротивление резистора (10 кОм) определено эмпирически. Напряжение на эмиттере фототранзистора буферизуется с помощью ОУ и затем подается на вход АЦП. Так как эта схема нелинейна, она откалибрована с помощью бытового фотоэкспонометра. Полученные численные значения занесены в виде переводной таблицы в ЭВМ, и уже когда ЭВМ получит данные, она преобразует их через переводную таблицу в фотографическую экспозицию.
Работа ЭВМ с подобными устройствами имеет два основных преимущества. Во-первых, даже самые непредсказуемые нелинейности легко компенсируются программным способом, путем использования соответствующей калибровочной схемы. Во-вторых если уж программа рассчитала текущую экспозицию (освещенность), то легко рассчитываются все другие связанные с ней параметры, например средняя освещенность за некоторый промежуток времени или интеграл от освещенности по времени.
Наиболее подходящее применение этой схемы – контроль световой энергии, падающей на светочувствительную поверхность. Например, если нам нужно контролировать количество света, получаемого растениям.
4. Датчик давления
Для практики представляют интерес недорогие кремниевые датчики давления. Имеющие входной сигнал чаще всего порядка нескольких вольт. Обычно такой датчик изготовляют из кремниевой пластины, часть которой вытравливают до образования тонкой мембраны. Методом ионной имплонтации на мембране выполняют резистивные элементы с межсоединениями. При изменении давления мембрана пригибается, и под действием пьезоэлектрического эффекта происходит изменение сопротивления резистивных элементов. Толщина мембраны, как и геометрическая форма резисторов, определяется областью допустимых давлений. Преимуществами широко распространенных датчиков этого типа являются:
- высокая чувствительность;
- хорошая линейность;
- незначительные гистерезисные явления;
- малое время срабатывания;
- компактная конструкция;
- экономичная планарная технология изготовления.
Основу датчика давления представляют четыре однотипных пьезорезистора, которые образуют мост, как показано на рис. 5.18. При этом отдельные резисторы (R1...R4) соединены так, что при прогибе мембраны сопротивление резисторов R1 и R3 возрастает, а у R2 и R4 - уменьшается. В результате достигается высокая чувствительность измерительного моста.
Рис. 5.18. Измерительный мост из
четырех идентичных пьезорезисторов, составляющих в совокупности датчик давления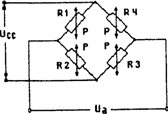
Выходное напряжение UA соответствует тогда уравнению
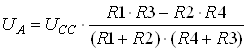
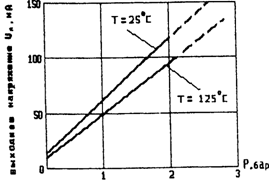
Рис. 5.19. Характеристика кремниевого датчика давления при различных температурах (25 и 125 °С).
На рис. 5.19 графически представлена зависимость UA (р) для типичного кремниевого датчика давления. Здесь же продемонстрировано и влияние температуры на чувствительность.
Поскольку в этом случае максимальное выходное напряжение составляет лишь 0.1 В , для дальнейшей обработки сигнала его нужно усилить еще примерно до 1 В. Такое 10-кратное усиление по напряжению с помощью стандартных операционных усилителей (741, LM358 и т.п.) не составляет проблемы, а поэтому согласование сигнала с измерительным прибором осуществляется легко. Для измерений с повышенной точностью следует дополнительно компенсировать температурную погрешность датчиков.
Существуют некоторые интересные варианты применения датчиков давления. К их числу относят измерение атмосферного давления. Предложенный ниже барометрический прибор пригоден для точного измерения давления атмосферы воздуха, которое на уровне моря равно 1013 мбар. С увеличением высоты (например, в горах) или при переменном состоянии погоды давление воздуха сильно изменяется. На высоте 10 км, например, оно падает до 256 мбар, а на 20 км – до 55 мбар. Изменение давления воздуха в зависимости от высоты (относительно уровня моря) описывается так называемым барометрическим уравнением:
![]()
где P – давление воздуха на высоте h,
P0 – давление воздуха на уровне моря (1013 мбар),
H – константа.
Принципиальная схема электронного барометра изображена на рис. 5.20. Датчик давления (например, KPY 10 фирмы Siemens) питается стабилизированным напряжением 15 В. Выходное напряжение составляет при этом 0...300 мВ для диапазона давлений 0...2 бар. Диапазон измерения давления атмосферного воздуха составляет 50 мбар (±25 мбар), следовательно, выходное напряжение должно быть усилено в 50 раз. Для этого можно применить дифференциальный усилитель (например, LM363). При нормальном атмосферном давлении на вход усилителя подается напряжение DU = 150 мВ, которое повышается операционным усилителем ОР1 до »7,5 В. Вторым операционным усилителем (например, LM358) с помощью настроечного потенциометра Р1 напряжение сигнала доводиться до 10 В. Сопротивления R2 и P1 равны 1 МОм, а сопротивление R1 равно 100 кОм.
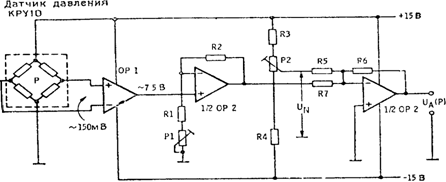
R5=R6=R7= 10кOм
Рис.5.20. Электронная схема барометра с датчиком давления KTY 10 Напряжение питания 15 В, стабилизированное. ОР — операционный усилитель
Установка нуля осуществляется делителем напряжения R3 = R4 = 20 кОм и Р2==10 кОм.
Точная установка (калибровка) выходною сигнала Ua осуществляется на испытательном стенде, показанном на рис. 5.21.
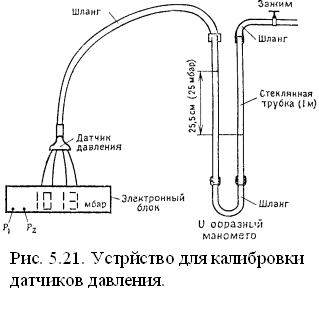
С помощью U-образной манометрической трубки, заполненной водой, можно создать колебания давления ±25 мбар, необходимые для регулировки чувствительности датчика давления. Поскольку нормальное давление 1013 мбар соответствует водяному столбу 10,34 м, колебание давления ±25 мбар соответствует изменению водяною столба ±25,5 см. U-образный манометр состоит из двух стеклянных трубок длиной около 1 м, соединенных между собой резиновым шлангом и наполовину заполненных водой (при возможности—дистиллированной). Если давление на входе и выходе одинаково, то и уровень воды в обеих трубках будет на одинаковой высоте В этом состоянии выход манометра соединяют с датчиком давления другим резиновым шлангом и отмечают выходное напряжение UA1. Нагнетая воздух во вход манометра, смещают уровень воды на 25,5 см. Эго второе выходное напряжение UA2 также отмечают. Разность DUA=UA2 - UA1 после калибровки должна составлять 250 мВ. Если величина DUA слишком мала, то нужно увеличить усиление с помощью настроечного потенциометра Р1. Указанная процедура повторяется до тех пор, пока не получится DUA =250 мВ.
Затем устанавливают нулевую то ту. Для этого у местной метеорологической службы запрашивают давление воздуха в данный момент. С помощью настроечного потенциометра Р2 устанавливается, например, выходной сигнал Ua = 10,05 В, соответствующий измеренному в данный момент давлению 1005 мбар.
После такой процедуры калибровки на выходе схемы получается значение давления воздуха в данный момент. В этом случае изменению выходного напряжения на 10 мВ соответствует изменение давления вот1у\а ii.i 1 мбар.
Если ожидаются довольно большие изменения температуры (например, DТ³20°С), то с помощью соответствующей схемы следует еще дополнительно компенсировать смещение нуля и изменение чувствительности.
Погрешности измерений.
БИС К572ПВ4 выдает нам восьми битовый код. Для того чтобы закодировать канал от датчиков нам необходимо 2 бита (22 = 4 канала можем закодировать). Эти два бита мы вставляем в передаваемый байт как два старших бита (7-ой и 8-ой): 00 – данные с датчика температуры; 01 – с датчика влажности; 10 - с датчика освещенности; 11 –с датчика давления. Оставшихся шесть бит в передаваемом байте и составляют непосредственно информацию с датчика, преобразованную АЦП в цифровой код. Так как АЦП выдает информацию в восьмибитовом варианте, то мы откидываем два старших бита и как результат уменьшается точность из-за возникшей погрешности измерений.
Абсолютная погрешность из-за двух отнятых бит составляет 112 = 3.
АЦП имеет входными параметрами каналов Uвхi в диапазоне от 0 до +2,5В, а на выходе – 8 бит.
Для того, чтобы погрешность была минимальной нам надо чтобы в результате всегда был задействован старший бит. То есть на выходе мы должны получать код в диапазоне от 28 до (29-1-3), т. е. от 128 до 252. В этом интервале значений относительная погрешность измерений составит от 3/252 до 3/128, т. е. от 1,19 до 2,34 % от истинного значения. А это вполне допустимая погрешность.
Соответственно, чтобы получать код в диапазоне от 128 до 252 на вход АЦП должны приходить значения аналоговых сигналов в диапазоне от 2,5 * 128 / 255 = 1,255 до 2,5 * 252 / 255 = 2, 471 В.
Наши схемы датчиков позволяют откалибровать схемы в данный диапазон напряжений.
ЗАКЛЮЧЕНИЕ
В данной курсовой работе разработано устройство контроля параметров окружающей среды (температуры, освещенности, влажности, давления).
Была полностью разработана схема сопряжения датчиков с ЭВМ. Однако, как видно из принципиальной схемы, не составляет труда расширить схему, чтобы она воспринимала большее количество источников или была более точной (или передавала данные с большей скоростью).
Из внимательного рассмотрения вышеизложенного материала можно видеть, что схема наша не лишена недостатков. Вот лишь некоторые из них:
1. В устройстве применены датчики зарубежных производителей.
2. Датчики и преобразователи требуют стабилизированного напряжения питания. В то же время в схеме отсутствует стабилизатор напряжения, что предъявляет повышенные требования к источнику питания.
3. Отсутствие контроля ошибок.
В то же время схема обладает и некоторыми (скромными) достоинствами:
1. Доступность элементной базы – схема составлена в основном из широко распространенных отечественных микросхем и радиодеталей.
2. Простота конструкции и дешевизна.
3. Малое энергопотребление значительно расширяет сферу применения данного устройства.
4. Простота калибровки. Калибровка может быть произведена как на аппаратном, так и на программном уровне, причем во втором случае настройка существенно упрощается.
Однако, несмотря на недостатки, схема несомненно может найти применение в агропромышленном комплексе, как в крупных тепличных хозяйствах, так и в малых подсобных теплицах.
Разработанное устройство обладает следующими характеристиками:
· Число контролируемых каналов от датчиков – 4;
· Разрядность данных, поступающих от датчиков – 6 двоичных разрядов;
· Интерфейс сопряжения с ЭВМ – типа RS-232;
· Скорость передачи данных компьютеру – 2400 бит/с;
· Генерация бита четности – отсутствует.