
Рефераты по авиации и космонавтике
Рефераты по административному праву
Рефераты по безопасности жизнедеятельности
Рефераты по арбитражному процессу
Рефераты по архитектуре
Рефераты по астрономии
Рефераты по банковскому делу
Рефераты по сексологии
Рефераты по информатике программированию
Рефераты по биологии
Рефераты по экономике
Рефераты по москвоведению
Рефераты по экологии
Краткое содержание произведений
Рефераты по физкультуре и спорту
Топики по английскому языку
Рефераты по математике
Рефераты по музыке
Остальные рефераты
Рефераты по биржевому делу
Рефераты по ботанике и сельскому хозяйству
Рефераты по бухгалтерскому учету и аудиту
Рефераты по валютным отношениям
Рефераты по ветеринарии
Рефераты для военной кафедры
Рефераты по географии
Рефераты по геодезии
Рефераты по геологии
Рефераты по геополитике
Рефераты по государству и праву
Рефераты по гражданскому праву и процессу
Рефераты по кредитованию
Рефераты по естествознанию
Рефераты по истории техники
Рефераты по журналистике
Рефераты по зоологии
Рефераты по инвестициям
Рефераты по информатике
Исторические личности
Рефераты по кибернетике
Рефераты по коммуникации и связи
Рефераты по косметологии
Рефераты по криминалистике
Рефераты по криминологии
Рефераты по науке и технике
Рефераты по кулинарии
Рефераты по культурологии
Курсовая работа: Синтез системы автоматического регулирования скорости вращения диска
Курсовая работа: Синтез системы автоматического регулирования скорости вращения диска
Министерство Образования Российской Федерации
Рязанская Государственная Радиотехническая Академия
Кафедра САПР вычислительных средств
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовой работе по дисциплине
“Основы автоматики и системы автоматического управления ”
на тему:
Синтез системы автоматического регулирования скорости вращения диска
Рязань 2002
Содержание
Исходные данные
Введение
1. Система автоматического регулирования скорости вращения диска
2. Определение передаточных функций звеньев. Синтез САР
Заключение
Библиографический список
Исходные данные
rmin = 40 мм; rmах = 120 мм; kат = 10-4 Н м с2.
| Вариант | V, м/с | f, кбайт/сек |
Тя, с |
kтг, В с/рад |
| 68 | 3 | 300 |
10-4 |
10-3 |
Характеристики задающих (возмущающих) воздействий и требования к САР.
САРВ должна обеспечивать точность по линейной скорости Dvmax = 10 мм/c при показателе колебательности M = 1, 5.
Введение
В настоящее время оптические дисковые системы нашли множество применений. Возможность записи значительного объема информации и простота тиражирования делает оптический диск очень привлекательным. В сфере записи и хранения данных системы с прямой оптической записью информации стали штатными периферийными устройствами компьютеров.
Просто осуществляемое сканирование по плоской поверхности диска при считывании, обеспечивающее быстрый доступ к информации, важное качество таких систем. Дополнительным достоинством оптических дисков является отсутствие физического контакта между считывающей головкой и несущем информацию слоем, так как считывание осуществляется пучком света, сфокусированным на этом слое. Защитный прозрачный слой, покрывающий носитель информации, предохраняет мелкие детали от повреждений и затеняющих частичек.
Как и в обычной граммофонной записи, информация расположена по спирали, которая называется дорожкой. Дорожка представляет собой спиральный прерывистый пунктир из меток записи. Метки являются маленькими областями, имеющими оптический контраст с окружающей их зеркальной поверхностью, например черные элементы в виде черточек или продолговатые углубления (питы) на поверхности. Оптическая считывающая головка, которая в данном случае заменяет механическую иглу граммофона, преобразует изменения отражения в электрический сигнал. Для этого объектив головки фокусирует лазерный луч в маленькое пятно на дорожке и направляет луч, отраженный от диска, на фотоприемник. Таким образом, сигнал с фотоприемника модулируется во времени в соответствии с метками на дорожке вращающегося диска.
Высокая плотность в записи информации достигается с помощью оптических средств, которые представляют собой оптический сканирующий микроскоп со средним увеличением. Предел плотности записи обусловлен дифракцией света, которая определяет минимальный диаметр пятна в фокальной плоскости. Размер пятна пропорционален длине волны света λ, излучаемого полупроводниковым лазером. Для используемых в настоящее время лазеров это составляет 109 - 1011 бит на диск.
В настоящее время оптические дисковые системы снабжены пятью системами автоматизированного регулирования, а именно:
– Вращения диска (САРВ);
– Тангенциального слежения (САРТ);
– Радиального слежения за дорожкой (САРД);
– Радиального перемещения каретки (САРРП);
– Вертикального слежения за фокусировкой (САРФ).
1. Система автоматического регулирования скорости вращения диска
В оптических дисковых системах считывание информации с компакт-диска производится с постоянной скоростью. Для этого необходимо поддерживать линейную скорость диска в точке под считывающим пятном постоянной. Поскольку при сканировании диска радиус (расстояние от считывающего пятна до центра вращаемого диска) меняется, угловая скорость вращения является функцией радиуса
W= ![]() =W(p),
=W(p),
где j - угол поворота диска;
r - радиус.
Дорожка на диске имеет вид непрерывной спирали, раскручивающейся от центра диска с постоянным шагом q между соседними дорожками. Уравнение такой спирали в полярной системе координат имеет вид
r= a×j, (1)
где а – некоторое положительное число, которое в нашем случае определяется выражением a=q/(2×p), показывающим, что при изменении угла j на 2p, радиус изменяется на q.
Поскольку точка по спирали перемещается с постоянной линейной скоростью V, то должно выполняться равенство
V=r![]() =const .(2)
=const .(2)
Тогда, дифференцируя (1) и подставляя в (2), получим
![]() .(3)
.(3)
Интегрируя дифференциальное уравнение (3) при начальных условиях t0 и r0 будем иметь
r2=![]() ×(t-t0)+r02
×(t-t0)+r02
Тогда закон изменения во времени r при чтении информации
r= ,(4)
,(4)
а угловой скорости
W=![]() =
= . (5)
. (5)
Выражение (5) можно использовать для формирования задающего воздействия, поступающего на вход следящей системы по скорости. Измеряя текущее значение угловой скорости вращения диска и сравнивая его с задающим воздействием, получим ошибку регулирования. Она, после усиления и коррекции, подается на двигатель привода диска, который изменяет угловую скорость своего вращения, приводя ошибку к нулю.
Однако, для создания такой системы потребуется дополнительное устройство для измерения текущего радиуса r, либо вычисления функции W(t), а также устройство для измерения угловой скорости вращения диска Wg(t). В реальных системах стараются использовать лишь информацию, получаемую со считывающей головки компакт-диска, поскольку в ней содержатся и сведения о скорости перемещения диска в точке считывания относительно головки.
Действительно, если запись на диск проводилась с постоянной линейной скоростью V, то каждый байт информации размещается на отрезке длины дорожки
Sб=V×t=const,t=1/f ,
где f – частота записи.
Так как время записи каждого байта t является постоянной величиной, то и отрезки fсч равны между собой. Тогда, при чтении информации с диска, линейная скорость
V=![]() = SБ×fW
= SБ×fW
пропорциональна частоте считывания fсч . Эта информация и используется для построения САРВ.
Упрощенная функциональная схема такой системы приведена на рис.1.
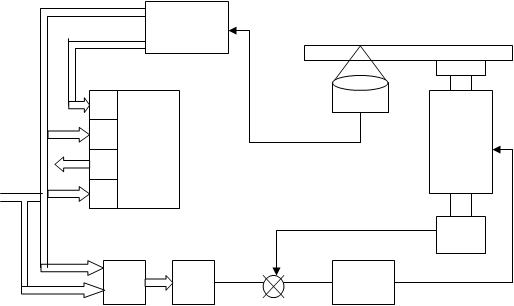
Рис.1. Функциональная схема САРВ.
Буферная память CD-ROM служит для обеспечения постоянства скорости передачи считываемых данных, если, несмотря на работу САРВ, скорость их чтения с диска изменяется. Она работает по принципу FIFO (первым пришел, первым вышел). Адрес записываемых данных увеличивается на единицу с частотой записи информации в память, а адрес считываемых данных - с частотой их чтения.
Поскольку даже в ранних моделях скорость передачи данных fr= 150 Кбайт/с., изменение адресов при рассмотрении работы САРВ, можно представить как непрерывную функцию времени. Тогда
Ar(t)=fr×t;
A3(t)=f3t,
где fr=1/tr=1/t=f - частота считывания данных из буферной памяти;
fз=1/tз - частота записи в буферную память.
Разность адресов, записываемых и считываемых, и буфера данных
DA(t)=(fr
- fз)×t = ![]() (V-V3)×t ,(6)
(V-V3)×t ,(6)
где
V= ![]() - скорость диска при
записи на него информации и скорость, которую должну становить САРВ при чтении
информации с диска;
- скорость диска при
записи на него информации и скорость, которую должну становить САРВ при чтении
информации с диска;
V3=![]() - текущая скорость диска.
- текущая скорость диска.
Дифференцируя выражение (6) по времени и переходя к операторной форме записи, получим
p×DA(t) = ![]() (V-V3).(7)
(V-V3).(7)
Данное выражение представляет собой дифференциальное уравнение, описывающее работу сравнивающего устройства и интерпретатора, которые формально заменяют: устройство выделения данных, формирующее адрес записываемых данных в буфер, устройство, формирующее адрес данных, считываемых из буфера, сумматор S и ЦАП, с точностью до коэффициента передачи ЦАП kцап, определяющего крутизну характеристики преобразования кода DА в напряжение.
С выхода ЦАП напряжение, пропорциональное интегралу разности ( V-V3), через усилитель мощности подается на электродвигатель постоянного тока с независимым возбуждением. Это возбуждение приводит во вращение диск, устанавливаемый на фланец, который закреплен на валу двигателя.
Зависимость скорости вращения вала двигателя W от питающего напряжения U, поступающего с усилителя мощности, и момента нагрузки Мн задается уравнением (11). При этом Мн представляет собой возмущающее воздействие, определяемое вариациями сил сопротивления вращению двигателя при работе САРВ. Линейная скорость перемещения считывающего пятна относительно диска V3 зависит от радиуса r и определяется выражением
V3 =r(t)×W.
При сканировании диска ρ(t) изменяется в соответствии с выражением (4) от некоторого значения ρmin до ρmax, определяющим радиусы начала и конца записи на диске. Однако скорость изменения радиуса невелика, поэтому при анализе работы САРВ можно считать радиус постоянным, равным например среднему значению. Но результаты полученные для среднего значения необходимо обязательно проверить при крайних значениях радиуса считывания.
Для коррекции САРВ, как правило применяется местная отрицательная обратная связь по скорости вращения двигателя. Для ее реализации на вал двигателя устанавливается датчик угловой скорости. Часто в качестве такого датчика используется тахогенератор, представляющий собой миниатюрный генератор постоянного тока с постоянными магнитами или электромагнитами. При фиксированном потоке возбуждения э.д.с. тахогенератора пропорциональна скорости вращения якоря относительно корпуса. Если учитывать переходные процессы в якорной цепи дифференциальное управление, описывающее его работу, будет иметь вид:
![]() ,
,
где: kТГ – крутизна характеристики;
![]() - постоянная времени якорной цепи.
- постоянная времени якорной цепи.
В большинстве случаев тахогенератор работает на высокоомное нагрузочное сопротивление rН (вход усилителя), поэтому постоянной времени ТЯ практически можно пренебречь. Тогда с высокой степенью точности можно считать, что
![]() .
.
Применение местной обратной связи позволяет существенно улучшить динамические характеристики двигателя и всей системы в целом.
2. Определение передаточных функций звеньев
Синтез САР. Вычисление передаточной функции двигателя.
В проекте используются электродвигатель постоянного тока с независимым возбуждением. Система уравнений для такого двигателя при управлении по цепи якоря имеет вид:
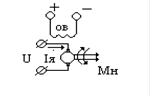
Рис.1. Двигатель постоянного тока
Lя
![]() + rя×iя - Cе×W=U(9)
+ rя×iя - Cе×W=U(9)
См×iя – I ![]() =Mн (10)
=Mн (10)
где Lя и rя - индуктивность и сопротивление нагрузки якорной цепи;
iя - ток якоря;
I - момент инерции якоря;
Се и См - коэффициенты пропорциональности между скоростью вращения и противо-э.д.с и между током якоря и вращающим моментом.
Вводя
оператор ![]() и решая уравнение
относительно скорости вращения
и решая уравнение
относительно скорости вращения ![]() ,
получим
,
получим
 ;
;
Примем ![]() .
Тогда получим:
.
Тогда получим:
![]() ;
;
Данная
зависимость представляет собой линеаризованные механические характеристики
двигателя постоянного тока. Следовательно коэффициент ![]() может быть подсчитан по
паспортным данным двигателя
может быть подсчитан по
паспортным данным двигателя
![]() ;
;
где ![]() - номинальное напряжение
двигателя;
- номинальное напряжение
двигателя;
W0 - угловая скорость идеального холостого хода (при U=Uном и Mн=0);
Iном и Мном - номинальный ток якоря и вращающий момент.
Вычислим электромеханическую постоянную времени:
![]() ;
;
Подставим
численные значения в уравнение зависимости ![]() :
:
![]() ;
;
Упростив
уравнение ![]() , получим передаточную
функцию двигателя:
, получим передаточную
функцию двигателя:
![]() ;
;
Из
уравнения видно, что коэффициент передачи двигателя ![]() .
.
Синтез корректирующего устройства.
Корректирующего звено вводится в систему регулирования, по средствам отрицательной обратной связи. Корректирующее устройство, представляет из себя идеальное безынерционное звено, с передаточной функцией:
![]() ;
;
Структурная схема САРВ имеет вид:
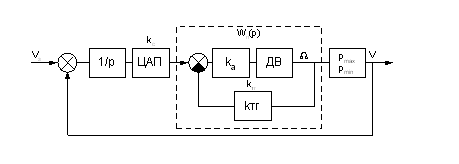
Рис.2. Структурная схема САРВ
Передаточная функция разомкнутой системы имеет вид:
![]() ,
,
Где ![]() -коэффициент
передачи ЦАП;
-коэффициент
передачи ЦАП;
![]()
Радиус ![]() определяется
как
определяется
как
![]() = 80 мм =0.8 м.
= 80 мм =0.8 м.
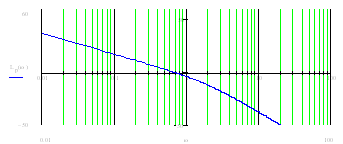 |
Построим ЛАЧХ и ЛФЧХ разомкнутой системы:
Оценим ошибку, вызванную постоянным входным воздействием вида:
![]()
Добьемся требуемого качества установившегося режима. Система должна обеспечивать точность Dvmax = 10 мм/c при входном воздействии gmax=500 мм, отсюда можно найти суммарный коэффициент усиления всех звеньев системы.
![]()
ЛАЧХ должна располагаться выше контрольной точки Ak
имеющая координаты( )
)
В этом случае значение ошибки так же будет иметь синусоидальный характер:
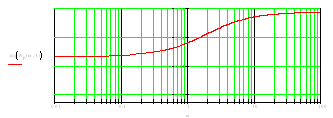
График зависимости ошибки от времени имеет вид:
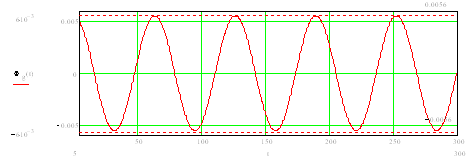
Т.к. амплитуда ошибки меньше Dvmax = 10 мм/c, то система регулирования удовлетворяет заданным критериям точности.
Корректировка системы происходит за счет изменения значения
коэффициента ![]()
Для увеличения устойчивости, ЛАЧХ разомкнутой системы на
частоте wм должна иметь значение: ![]() , где M=1.5-показатель
колебательности
, где M=1.5-показатель
колебательности
Зачение wм, находим поформулам:
 |
Где w0-базовая частота. Ее находим по ЛАЧХ ,как точку пересечения с осью абцисс.
![]()
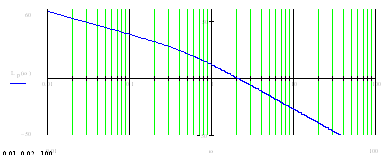
ЛАЧХ скорректированной системы имеет вид:
Временная характеристика переходного процесса, вызванного воздействием на систему функцией 1(t) имеет вид:
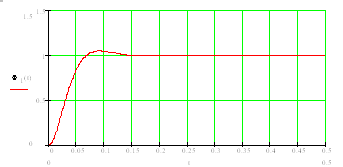
Т.о. требование значения показателя колебательности системы M=1.5 выполняется.
Заключение
Под улучшением качества процесса регулирования, помимо повышения точности в типовых режимах, понимается изменение динамических свойств системы регулирования с целью получения необходимого запаса устойчивости и быстродействия. В этой проблеме основное значение имеет обеспечение запаса устойчивости. Это объясняется тем, что стремление снизить ошибки системы регулирования приводит, как правило, к необходимости использовать такие значения общего коэффициента усиления, при которых без принятия специальных мер система вообще оказывается неустойчивой.
При решении задачи повышения запаса устойчивости проектируемой системы регулирования прежде всего необходимо попытаться рациональным образом изменить ее параметры (коэффициенты передачи отдельных звеньев, постоянные времени и т. п.) так, чтобы удовлетворить требованиям качества регулирования, которые определяются критериями качества. При невозможности решить эту задачу в рамках имеющейся системы приходится идти на изменение ее структуры. Для этой цели обычно используется введение в систему регулирования так называемых корректирующих средств, которые должны изменить динамику всей системы в нужном направлении. К корректирующим средствам относятся, в частности, корректирующие звенья, представляющие собой динамические звенья с определенными передаточными функциями.
Для оценки качества любой системы регулирования, в том числе и следящей системы, необходимо знать ее точность, характеризуемую ошибками в некоторых типовых режимах, быстродействие, определяемое по способности системы работать при больших скоростях и ускорениях входного воздействия или по быстроте протекания переходных процессов, и запас устойчивости, показывающий склонность системы к колебаниям. В соответствии с этим можно говорить о критериях точности, критериях быстродействия и критериях запаса устойчивости. При использовании частотных критериев необходимо основываться на тех или иных частотных свойствах системы регулирования.
Библиографический список
1. Сапаров В.Е., Максимов Н.А. Системы стандартов в электросвязи и радиоэлектронике. М.: Радио и связь, 1985. 248 с.
2. Микропроцессорные системы автоматического управления./Под ред. Бесекерского В.А. Л., Машиностроение, 1988.
3. Бесекерский В.А., Изранцев В.В. Системы автоматического управления с микроЭВМ. М., Наука, 1987.
4. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. М., Наука, 1975.
5. Теория автоматического управления./Под ред. Воронова А.А. М., Высшая школа, 1986, Т.1, 2.