
Рефераты по авиации и космонавтике
Рефераты по административному праву
Рефераты по безопасности жизнедеятельности
Рефераты по арбитражному процессу
Рефераты по архитектуре
Рефераты по астрономии
Рефераты по банковскому делу
Рефераты по сексологии
Рефераты по информатике программированию
Рефераты по биологии
Рефераты по экономике
Рефераты по москвоведению
Рефераты по экологии
Краткое содержание произведений
Рефераты по физкультуре и спорту
Топики по английскому языку
Рефераты по математике
Рефераты по музыке
Остальные рефераты
Рефераты по биржевому делу
Рефераты по ботанике и сельскому хозяйству
Рефераты по бухгалтерскому учету и аудиту
Рефераты по валютным отношениям
Рефераты по ветеринарии
Рефераты для военной кафедры
Рефераты по географии
Рефераты по геодезии
Рефераты по геологии
Рефераты по геополитике
Рефераты по государству и праву
Рефераты по гражданскому праву и процессу
Рефераты по кредитованию
Рефераты по естествознанию
Рефераты по истории техники
Рефераты по журналистике
Рефераты по зоологии
Рефераты по инвестициям
Рефераты по информатике
Исторические личности
Рефераты по кибернетике
Рефераты по коммуникации и связи
Рефераты по косметологии
Рефераты по криминалистике
Рефераты по криминологии
Рефераты по науке и технике
Рефераты по кулинарии
Рефераты по культурологии
Реферат: Ультразвуковые сканеры
Реферат: Ультразвуковые сканеры
УЛЬТРАЗВУКОВЫЕ СКАНЕРЫ
Введение
Ультразвуковые аппараты для интроскопии в литературе встречаются под разными названиями: эхоскопы, эхотомоскопы, УЗ сканеры. Первое и второе названия подчеркивают их физическую сущность – отражение УЗ колебаний от границ раздела сред и органов, а второе – форму исследуемой области – сечение. Более емким по смыслу является третье название – оно совмещает физическую и техническую особенности этих аппаратов. На дверях кабинетов для УЗ обследования можно увидеть таблички с надписью «УЗИ». Этой аббревиатурой часто пользуются и пациенты. Ее можно расшифровать как «ультразвуковые исследования» и как «ультразвуковая интроскопия».
1. Физические основы УЗ визуализации
Работа большинства УЗ сканеров основана на явлении отражения ультразвуковых колебаний от границ раздела сред. Важнейшими акустическими параметрами, которые учитываются при проектировании УЗ сканеров, являются скорость распространения звуковых колебаний, волновой импеданс и затухание.
Скорость распространения звука в однородной среде зависит от ее плотности и упругости и определяется формулой
![]() ,
,
где ![]() - модуль
упругости среды,
- модуль
упругости среды, ![]() - плотность.
- плотность.
Величины скорости распространения звука в мягких тканях и жидких средах организма (ликворах) отличаются очень мало и близки к скорости звука в воде - 1540 м/c. Скорость звука в костных тканях изменяется в широких пределах – от 1700 до 2300 м/с.
Волновой акустический импеданс аналогичен волновому сопротивлению длинной линии и представляет собой отношение акустического давления Р к колебательной скорости v частиц среды. Однако эти величины обычно неизвестны. Волновой импеданс можно определить также через скорость звука и плотность среды:
![]() . (1)
. (1)
Волновой
импеданс мягких тканей близок к импедансу воды и составляет примерно 1,5 10![]() кг/
кг/![]() .
.
Обобщенной энергетической характеристикой УЗ колебаний, как и физических колебаний любой природы, является интенсивнось I – мощность, приходящаяся на единицу поверхности. При распространении в тканях организма ультразвуковые колебания претерпевают значительное затухание. Интенсивность колебаний на поверхности тела и на некоторой глубине z связаны между собой приблизительно экспоненциальной зависимостью
![]()
где ![]() - коэффициент
затухания (затухание на единицу длины).
- коэффициент
затухания (затухание на единицу длины).
Затухание
ультразвуковых колебаний зависит от вида ткани и частоты. Принято считать, что
оно растет пропорционально частоте. УЗ сканеры работают на высоких частотах –
от 3 до 15 МГц, поэтому затухание УЗ колебаний имеет большую величину. В табл.
1 приведены коэффициенты затухания ультразвука ![]() в дБ/см для различных тканей и
сред организма.
в дБ/см для различных тканей и
сред организма.
Таблица 1. Коэффициенты затухания ультразвука в биологических средах.
| Ткань |
|
Ткань |
|
|
Сыворотка Кровь Жировая ткань Мозг Печень Стенки прямой кишки |
0,03 0,09 0,6 0,9 1,0 1,2 |
Мышцы Сердечная мышца Почка Кожа Кость Ткань легкого |
0,7 – 1,4 2,0 2,5 3,5 более 8,0 30,0 |
Из таблицы видно,
что затухания ультразвука в кости, и особенно в легких, очень велики. Последнее
обстоятельство объясняется обилием в легком альвеол, заполненных воздухом.
Поэтому костные структуры, легкие, а также желудок с помощью УЗ сканеров не
исследуются. Среднее затухание ультразвука в исследуемых областях рассчитывают
на основе эмпирического соотношения аср = 1дБ ´ 1см ´ 1МГц. Пользуясь этим соотношением,
найдем, что при глубине локации 20 см на частоте 3 МГц с учетом двойного хода
УЗ луча максимальное затухание составит 120 дБ или ![]() раз.
раз.
УЗ колебания, как и световые, подчиняются законам отражения и преломления. Длина волны звуковых колебаний связана с частотой формулой, общей для вех видов колебаний
![]()
Приняв ![]() 1500 м/с и f = 3МГц, получим
1500 м/с и f = 3МГц, получим ![]() мм. Для колебаний с
такой длиной волны поверхность объекта с радиусом кривизны в 10 мм можно считать плоскостью.
мм. Для колебаний с
такой длиной волны поверхность объекта с радиусом кривизны в 10 мм можно считать плоскостью.
Наиболее существенным фактором, определяющим контраст изображения УЗ сканеров, является отражательная способность границ раздела сред и объектов. Отражение УЗ колебаний от границы раздела двух сред происходит при различии их волновых импедансов. Коэффициент отражения представляет собой отношение интенсивностей (или давлений) падающей и отраженной волн и определяется формулой
![]() . (2)
. (2)
Наряду с полезной ролью отражение УЗ колебаний, как увидим далее, создает проблемы при проектировании датчиков.
2 Преобразователи УЗ колебаний
Ультразвуковые колебания в диапазоне частот, который используется для диагностики, возбуждаются и преобразуются в электрический сигнал с помощью пьезоэлектрических преобразователей. Пьезоэлектрический преобразователь (ПЭП) представляет собой пластинку, вырезанную из пьезоэлектрика вдоль определенной кристаллографической оси и покрытую с обеих сторон металлизацией, которая служит электродами (рис.1).
| Если между гранями пластины приложить силу F, то на ее электродах появятся заряды, а между электродами – разность потенциалов. Если же к ним подвести переменное напряжение U, то пластина будет совершать колебания. Их амплитуда будет максимальной на частоте собственного резонанса пластины, определяемой ее толщиной и механическими свойствами. |
F + + + + U - - - - F
Рисунок 1. Пьезопреобразователь. |
Важнейшими
параметрами ПЭП являются пьезоэлектрический модуль d, представляющий собой отношение заряда на электродах к силе,
и коэффициент преобразования механической энергии в электрическую ![]() :
:
![]() ;
; ![]() .
.
Пьезоэлектрические
материалы характеризуются также диэлектрической проницаемостью ![]() , модулем упругости,
волновым импедансом Z и некоторыми другими параметрами,
важными для проектирования ПЭП. Большинство из этих параметров для разных
направлений (осей) в пьезокристалле имеет разное значение. Обычно пластину
вырезают с такой ориентацией, чтобы получить максимально возможные величины
, модулем упругости,
волновым импедансом Z и некоторыми другими параметрами,
важными для проектирования ПЭП. Большинство из этих параметров для разных
направлений (осей) в пьезокристалле имеет разное значение. Обычно пластину
вырезают с такой ориентацией, чтобы получить максимально возможные величины ![]() и
и ![]() .
.
Для ПЭП ультразвуковых аппаратов наиболее часто используют синтетические пьезоэлектрики на основе цирконата-титаната свинца ЦТС -19 и ЦТС-23, а также PZT (США). Материал ЦТС представляет собой твердый раствор цирконата свинца PbZrO3 и титаната свинца PbTiO3. Для придания этой керамике свойств пьезоэлектрика ее помещают в сильное электрическое поле, которое ориентирует отдельные микроскопические области (кристаллиты) в направлении поля. После его снятия поляризация сохраняется. Одним из первых пьезоэлетриков, применявшихся в УЗ технике, был кварц, который обладает очень высокой добротностью, но по большинству других параметров существенно уступает синтетическим пьезоэлектрикам. В табл. 2 приведены важнейшие параметры пьезоэлектриков ЦТС-19 и PZT-4 в сравнении с кварцем.
Таблица Параметры пьезоэлектриков
| Параметры | Кварц | ЦТС-19 | PZT-4 |
|
e /e0 К Пьезомодуль,
Кл/Н ×10 Плотность,
кг/м Волновой импеданс (Z/Zволы) Скорость звука, м/c |
5 0,01 2 2650 7,6 5750 |
1490 0,64 304 7700 14 4000 |
3400 0,75 593 7500 14,7 4500 |
Для анализа переходных процессов в ПЭП применяют различные методы : метод дифференциальных уравнений, четырехполюсника , электрических моделей. Эти методы достаточно подробно изложены в [1] и [2]. В методе четырехполюсника связывают входное воздействие и выходную реакцию ПЭП. Ими могут быть различные физические величины. Например, в режиме излучателя входными величинами будут напряжение Е и ток I, а выходными – сила F и колебательная скорость v ( рис.2).
 |
Рисунок 2 Модель ПЭП в виде четырехполюсника
Нагрузкой ПЭП
является акустическое сопротивление Z![]() , которое при глубине локации 50 – 100 мм равно среднему волновому акустическому импедансу «озвучиваемой» среды. Входные и выходные
величины связаны между собой матричным уравнением
, которое при глубине локации 50 – 100 мм равно среднему волновому акустическому импедансу «озвучиваемой» среды. Входные и выходные
величины связаны между собой матричным уравнением
![]() =
= ![]()
![]() ( 3)
( 3)
Коэффициенты ![]() являются
сложными функциями физических параметров ПЭП. Для малых сигналов ПЭП представляет
собой линейный обратимый четырехполюсник. В режиме приемника I и v изменяют свои направления, а матричное уравнение будет иметь
вид
являются
сложными функциями физических параметров ПЭП. Для малых сигналов ПЭП представляет
собой линейный обратимый четырехполюсник. В режиме приемника I и v изменяют свои направления, а матричное уравнение будет иметь
вид
![]() =
= ![]()
![]()
![]()
Коэффициенты ![]() и
и ![]() связаны
соотношениями:
связаны
соотношениями:
![]()
![]()
![]()
![]()
![]()
Пьезопреобразователь можно характеризовать коэффициентами передачи. Например, для режима излучателя это будет отношение
![]() .
.
Обозначив площадь
ПЭП через ![]() ,
запишем
,
запишем ![]()
![]() /
/![]() , а согласно определению
, а согласно определению ![]() /
/![]() . С учетом этих соотношений из уравнения (3) находим
. С учетом этих соотношений из уравнения (3) находим
![]() .
.
Коэффициенты ![]() и
и ![]() являются
функциями частоты.
являются
функциями частоты.
Для наглядных представлений часто используют эквивалентную электрическую схему ПЭП. Один из возможных вариантов такой схемы приведен на рис.3.
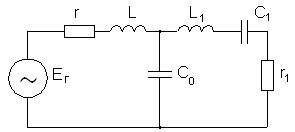 |
Рисунок 3. Электрическая модель пьезоэлемента.
Здесь r и L - активное сопротивление и индуктивность внешней цепи
(индуктивность может быть и специально включаемой), С![]() - емкость между обкладками ПЭП; L
- емкость между обкладками ПЭП; L![]() , С
, С![]() , r
, r![]() - параметры электрической модели ПЭП, отражающие его
механические свойства. Вследствие большой диэлектрической проницаемости
пьезоэлектриков ЦТС емкость С
- параметры электрической модели ПЭП, отражающие его
механические свойства. Вследствие большой диэлектрической проницаемости
пьезоэлектриков ЦТС емкость С![]() ПЭП даже при его небольших
размерах может быть сравнительно большой - сотни пФ.
ПЭП даже при его небольших
размерах может быть сравнительно большой - сотни пФ.
Как видим,
электрическая модель ПЭП представляет собой систему связанных контуров, поэтому
в ней возможен резонанс на двух частотах. Последовательный контур L![]() , C
, C![]() , r
, r![]() имеет высокую добротность, которая отражает высокую
собственную механическую добротность пьезокристалла. Однако, как увидим далее,
она не должна быть слишком высокой при импульсной локации объектов и ее
уменьшают электрическим (включением внешних элементов) и механическим путем
(демпфированием).
имеет высокую добротность, которая отражает высокую
собственную механическую добротность пьезокристалла. Однако, как увидим далее,
она не должна быть слишком высокой при импульсной локации объектов и ее
уменьшают электрическим (включением внешних элементов) и механическим путем
(демпфированием).
3. Конструкции и технологии датчиков
Первыми датчиками для универсальных УЗ сканеров были секторные механические датчики качающегося типа (термин «качающийся» относится к пьезоэлектрическому преобразователю). Сейчас они постепенно вытесняются электронно-управляемыми датчиками (линейными и конвексными), но по-прежнему применяются и совершенствуются.
Обобщенная структурная схема такого датчика приведена на рис.4.
 |
||||||
 |
||||||
 |
 |
|||||
Рисунок 4. Структурная схема механического датчика.
Электродвигатель может совершать возвратно-вращательное движение и одностороннее вращение. В зависимости от этого датчик углового положения может иметь различный принцип действия и конструкцию. Преобразователь движения может включать редуктор и преобразователь вида движения (перевод вращения из одной плоскости в другую, перевод вращательного движения в качательное).
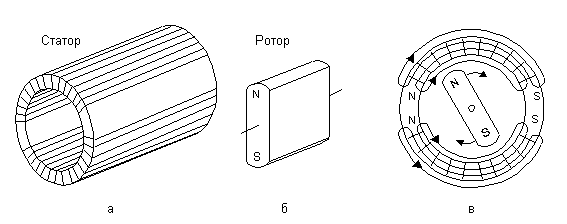 |
Рассмотрим вначале устройство отдельных узлов датчика, в котором двигатель совершает возвратно-вращательное движение. Для этого применяют так называемые моментные двигатели постоянного тока. Они питаются от управляющего устройства, вырабатывающего напряжение специальной формы. Упрощенная конструкция и некоторые детали такого двигателя изображены на рис.5
Рисунок 5 Моментный двигатель постоянного тока.
Основными частями электродвигателя являются статор и ротор (рис. 5, а, б) Статор собирается из тонких пермаллоевых колец. Обмотка статора состоит из двух секций, которые включаются встречно. Ротор представляет собой постоянный магнит из феррита. При пропускании тока через обмотки статора они создают в сердечнике магнитные потоки, направленные в разные стороны, поэтому основной поток в сердечнике равен нулю. Но ввиду того, что ширина колец мала по сравнению с их диаметром, образуются потоки рассеяния, сцепленные с обмотками. Получаются как бы два магнита с одинаково расположенными одноименными полюсами. Взаимодействуя с полями этих магнитов, ротор поворачивается, стремясь занять положение, параллельное обмоткам. Динамические характеристики механической системы и параметры тока возбуждения (величина, форма, период) согласованы так, что когда ротор повернется на угол 90 – 100о от исходного крайнего положения, происходит коммутация тока в обмотках и начинается его движение в обратную сторону.
Чтобы движение было равномерным, необходимо постоянство вращающего момента, а для этого в свою очередь требуется постоянство тока в обмотках. В момент коммутации и смены направления вращения возникают броски тока за счет инерционности системы управления (рис 6). В некоторых случаях ток может линейно нарастать (штриховая линия на рисунке). Требуемую форму тока обеспечивает специальная система регулирования с обратной связью через датчик угла поворота. Она учитывает механические и электрические характеристики системы. В режиме М должен быть задан определенный угол поворота пьезопреобразователя. Для этого система регулирования с высокой частотой реверсирует ток в обмотках статора, удерживая тем самым ротор в одном положении.
 |
Рисунок 6. Форма тока моментного двигателя.
Броски тока двигателя весьма нежелательны, особенно при пуске датчика. Пусковые токи могут достигать величин, опасных (несколько ампер) для выходного усилителя системы управления, питающего двигатель. При сбое системы управления могут одновременно включиться все механические датчики используемого комплекта (как правило, все они подключены и выбираются с помощью сенсоров). Это может привести к выходу усилителя из строя. На этот случай предусмотрена защита, например, в виде плавкого предохранителя.
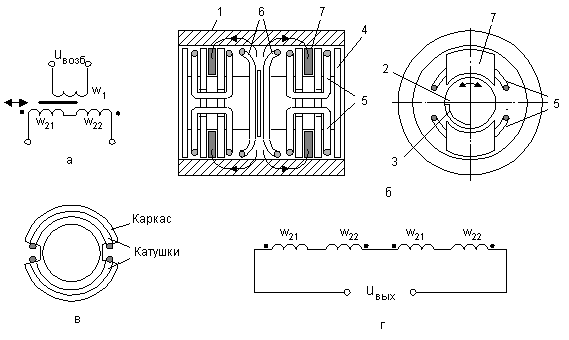 |
На общем валу с электродвигателем находится ротор датчика угла поворота (ДУП). Конструкцию и принцип действия ДУП поясняет рис.7. По сути, он представляет собой дифференциальный трансформаторный датчик перемещения (рис.7,а). Он имеет обмотку возбуждения w1 и вторичные обмотки w21 и w22,
Рисунок 7. Датчик углового положения трансформаторного типа.
которые включены встречно. Подвижный сердечник перемещается относительно этих обмоток, при этом ЭДС в них изменяются. В среднем положении сердечника они одинаковы, и выходной сигнал равен нулю. При смещении сердечника влево или вправо ода из ЭДС увеличивается, а другая уменьшается. Выходной сигнал растет по величине и может иметь различную фазу в зависимости от положения сердечника (левое или правое). Так как габариты датчика очень маленькие, первичная обмотка возбуждается высокочастотным током (10 – 15 кГц).
На рис 7, б изображена упрощенная конструкция ДУП. Его основными частями являются статор 1 из мягкой стали, ротор 2 из немагнитной стали (например, 36НХТЮ) с помещенной на нем пластинкой 3 из ферромагнетика, каркас 4 с размещенными на нем парами сигнальных катушек 5 и катушкой возбуждения 6. Сигнальные катушки расположены парами симметрично относительно центра и имеют сложную форму. Для лучшего представления о ней на рис 14, в показан фрагмент каркаса и одна пара катушек. Пары соединяются последовательно, так, чтобы одноименные катушки были включены согласно (рис.7, г). Катушка возбуждения находится между парами сигнальных катушек. При монтаже края ее витков разводят («распушают»). Внутри сигнальных катушек закрепляют ферритовые сердечники 7.
За счет «распушивания» катушки возбуждения значительная часть создаваемого ею магнитного потока ответвляется в статор и попадает в сердечники 7. Перемещение ферромагнитной пластинки 3 вызывает перераспределение магнитных сопротивлений между сердечниками 7 и катушками сигнальных пар, изменение их ЭДС и возникновение сигнала на выходе. Датчик проектируют, а затем регулируют таким образом, чтобы зависимость величины сигнала от угла поворота была линейной.
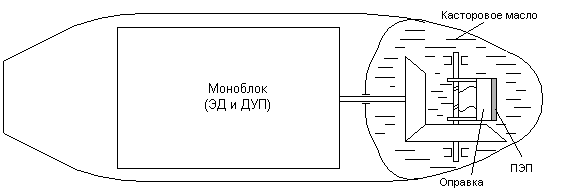 |
Передачу вращательного движения из одной плоскости в другую осуществляют с помощью пары конических шестеренок. Они вместе с ПЭП находятся в герметичной камере, заполненной иммерсионной жидкостью (рис 8), которая служит для передачи УЗ колебаний. В качестве такой жидкости обычно применяют касторовое масло.
Рисунок 8. Передача движения на пьезопреобразователь.
Дисковый пьезопреобразователь находится в оправке, которая закреплена на оси шестеренки. Для подвода импульса возбуждения и съема эхо-сигнала используются гибкие проводники, которые навиваются на ось. Это исключает их болтание во время качания ПЭП и продлевает срок службы. Электродвигатель и датчик углового положения конструктивно объединяются в моноблок, размещаемый в цилиндрическом корпусе из легкого металла.
Сложность системы управления датчиком с колебательным двигателем и переходные процессы, возникающие при его реверсе, побуждают разработчиков вновь обратиться к датчикам с непрерывно вращающимся двигателем. Они применялись и раньше в УЗ сканерах аналогового типа. В качестве ДУП в них использовались синусно-косинусные трансформаторы (СКТ), которые подобно трансформаторному ДУП, рассмотренному выше, имеют три обмотки. Одна из них – обмотка возбуждения, питаемая ВЧ током, а две другие – синусная и косинусная – дают сигналы, пропорциональные синусу и косинусу угла поворота ротора. В качестве датчиков угла СКТ оказались неудобными для современных цифровых УЗ аппаратов.
В датчиках с непрерывным вращением используются стандартные двигатели постоянного тока. Так как обычно они высокоскоростные, приходится понижать частоту вращения с помощью редукторов примерно с 3000 об/мин до 300 об/мин. Кроме того, нужен специальный механизм для преобразования вращательного движения в колебательное. В таком датчике перспективно применение ДУП с оптоэлектронными преобразователями. Принцип этих датчиков хорошо известен. Они применяются, например, в «мыши» компьютера для управления положением курсора. Один из возможных вариантов кинематической схемы датчика с односторонне вращающимся двигателем и ДУП оптронного типа приведен на рис.9.
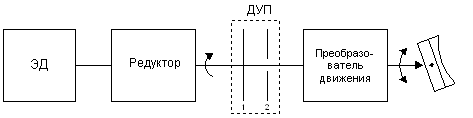 |
Рисунок 9. Датчик с односторонне вращающимся двигателем.
Частота вращения электродвигателя понижается редуктором. Вращение его выходного вала преобразователем движения переводится в качательное движение ПЭП. Оптоэлектронный датчик углового положения состоит из двух дисков 1 и 2, причем диск 1 сидит на общем валу редуктора и преобразователя движения и, следовательно, вращается, а диск 2 неподвижен. Вал проходит через отверстие в его середине.
Более подробно устройство оптоэлектронного ДУП поясняет рис.10. Измерение углов производится с помощью ИК оптотоэлектронных пар ОП1, ОП2 и ОП3. Излучение источников проходит через щели и отверстия, расположенные на дисках. На диске 1 по периметру размещены щели (их может быть 128 – 256) и имеется одно отверстие. На диске 2 имеется две группы щелей по 8 –12 в каждой, разнесенные на угол около 90о. Для ИК излучения отверстие и щели диска 2 играют роль коллиматоров. Шаг щелей одной группы такой же, как и на диске 1, а шаг другой группы несколько иной. Одна из групп щелей (с меньшим шагом) выполняет роль нониуса и служит для более точного измерения углов. Метод нониуса широко используется в
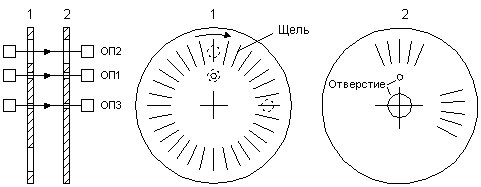 |
Рисунок 10. Оптоэлектронный датчик углового положения.
измерительной технике. Нониусы имеются на штангенциркулях, микрометрах, лимбах металлорежущих станков. Применяется этот метод и в электронных измерительных приборах.
При сборке датчика ПЭП устанавливается в определенное начальное положение. Когда в процессе вращения происходит совпадение отверстий, ИК луч от источника оптопары ОП1 попадает на ее приемник. Возникающий в нем импульс свидетельствует о начале движения в секторе качания. Одновременно с этим импульсом начинают поступать импульсы от оптопар ОП2 и ОП3. Первые из них (по ходу вращения) совпадают во времени, затем они начинают расходиться и в некоторый момент снова происходит совпадение. По числу импульсов между первым и вторым совпадением и уточняют величину измеряемого угла. С помощью нониуса измерения штангенциркулем можно производить с точностью до 0,1 мм и даже 0,05 мм. В данном случае измерение угла можно производить с точностью, по крайней мере, до половины шага.
Управление датчиком с непрерывно вращающимся двигателем намного проще, чем датчиком с качающимся двигателем. Кроме стабилизатора скорости вращения для двигателя практически ничего не требуется. Основная сложность при производстве датчика заключается в изготовлении дисков со щелями и их юстировке (установке нужного взаимного расположения). Определенные трудности возникают и при проектировании преобразователя вида движения – вращения в качание. Он должен быть компактным, долговечным, вносить небольшие дополнительные
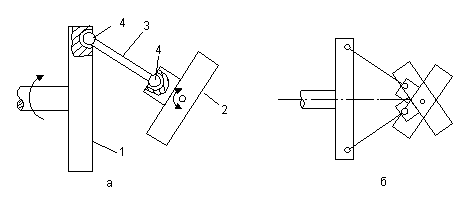 |
Рисунок 11. Преобразователь вида движения.
вибрации. Так как преобразователь в основном располагается в камере с иммерсионной жидкостью, то он должен иметь обтекаемую форму, чтобы испытывать наименьшее сопротивление и не создавать завихрений в жидкости при своем движении. Простейшая конструкция преобразователя движения предлагается на рис.11.
Передача движения от вала редуктора на пьезопреобразователь 1 осуществляется с помощью диска 2 (водило) через шатун 3 и шарниры 4 (рис 11,а). Так как ПЭП закреплен на оси, то он совершает качательное движение. Шатун при этом вращается по конической поверхности и все время проворачивается в шарнирах (рис. 11, б). Эта конструкция, конечно, не отвечает поставленным выше требованиям. На самом деле она значительно сложнее. Основной недостаток датчиков с качающимся ПЭП – неприятные ощущения вибрации, которые испытывает врач. Они накапливаются в течение длительного времени и иногда приводят к развитию синдрома вибраций. Поэтому в некоторых странах такие датчики даже запрещены. Тем не менее, секторные механические датчики в ряде случаев практически незаменимы (внутриполостные применения).
Для точечных исследований применяют метод пункций. Обычно для этого используют линейные или конвексные датчики с насадкой в виде иглы, по которой передаются УЗ колебания.